Hamilton-Jacobi Reachability Analysis for Hybrid Systems with Controlled and Forced Transitions

0
Sign in to get full access
Overview
- This research paper presents a Hamilton-Jacobi reachability analysis framework for hybrid systems with both controlled and forced transitions.
- The framework allows for the computation of reachable sets and control strategies for these complex systems.
- The approach combines Hamilton-Jacobi techniques with a novel modeling of controlled and forced transitions to provide safety guarantees.
Plain English Explanation
The paper describes a method for analyzing the behavior of a particular type of system called a "hybrid system." Hybrid systems have both continuous dynamics, like a classical control system, and discrete transitions, like a computer program. This makes them more complex to model and analyze than traditional control systems.
The researchers developed a framework based on Hamilton-Jacobi reachability analysis to study these hybrid systems. Hamilton-Jacobi analysis is a powerful mathematical tool for understanding the set of states a system can reach, given its dynamics and constraints.
Crucially, the researchers extended this approach to handle two types of transitions in the hybrid system: "controlled" transitions that the system can choose, and "forced" transitions that occur automatically. This more realistic modeling of hybrid systems allows the framework to provide stronger safety guarantees about the system's behavior.
By combining Hamilton-Jacobi analysis with this hybrid system model, the researchers developed a method to compute the set of states the system can reach, as well as control strategies to keep the system within safe regions. This could be useful for applications like motion planning for hybrid dynamical systems or verifying the safety of vision-based controllers.
Technical Explanation
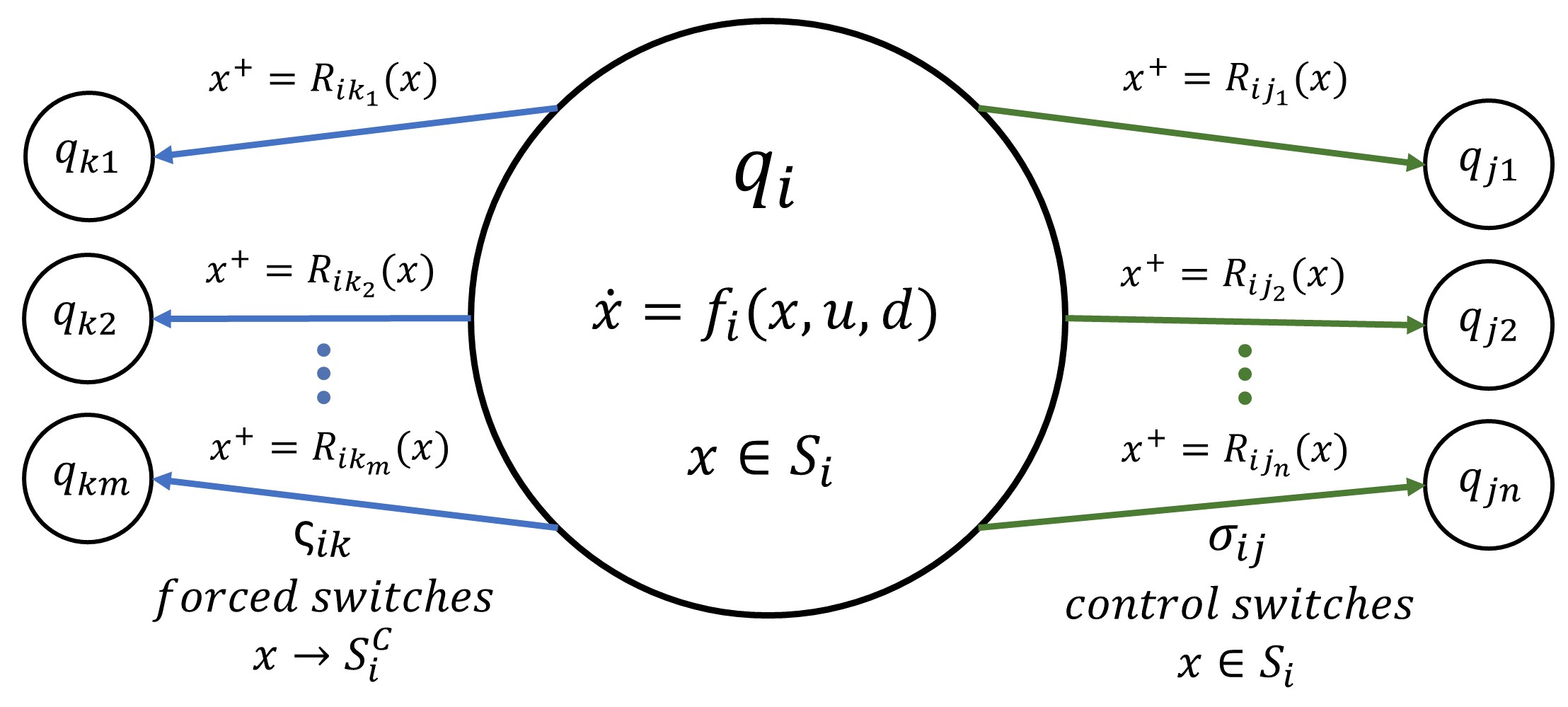
The paper presents a Hamilton-Jacobi reachability analysis framework for hybrid systems with both controlled and forced transitions. Hybrid systems exhibit both continuous dynamics and discrete transitions, which makes them challenging to model and analyze.
The researchers formulate the hybrid system as having two types of transitions: controlled transitions that the system can choose, and forced transitions that occur automatically. This more realistic modeling allows the framework to provide stronger safety guarantees.
The key technical contribution is the integration of Hamilton-Jacobi reachability analysis with this hybrid system model. Hamilton-Jacobi analysis is used to compute reachable sets and control strategies that keep the system within safe regions, even in the presence of both controlled and forced transitions.
The paper provides a detailed mathematical formulation of the problem and the associated Hamilton-Jacobi partial differential equations. It also describes numerical algorithms for approximating the reachable sets and control policies.
The authors demonstrate the effectiveness of their approach through several examples, including a parameter-conditioned reachable set update and a planar motion planning problem for a hybrid system.
Critical Analysis
The paper presents a robust and comprehensive framework for analyzing the safety and control of hybrid systems with both controlled and forced transitions. The key strengths are the realistic modeling of the hybrid system dynamics and the principled integration of Hamilton-Jacobi techniques to provide formal guarantees.
However, the paper does not fully address the computational complexity of the proposed approach. While numerical algorithms are provided, the scalability of the method to high-dimensional systems or complex hybrid automata is not extensively explored. Additionally, the paper does not discuss potential issues with the accuracy of the numerical approximations or the sensitivity of the results to modeling uncertainties.
Further research could investigate ways to improve the computational efficiency of the framework, perhaps through the use of value function approximation techniques or parallelization strategies. Robustness to modeling errors and the integration with other verification or safety assurance techniques could also be valuable areas for future work.
Conclusion
This research paper presents a novel Hamilton-Jacobi reachability analysis framework for hybrid systems with both controlled and forced transitions. By modeling these two types of transitions, the framework can provide stronger safety guarantees than previous approaches.
The technical contributions include the mathematical formulation of the problem and the development of numerical algorithms to compute reachable sets and control strategies. The results demonstrate the potential of this approach for applications such as motion planning, control, and safety verification of complex hybrid systems.
While further research is needed to address the computational scalability and robustness of the method, this work represents an important step forward in the analysis and design of safe and reliable hybrid systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!