Robust Multimodal 3D Object Detection via Modality-Agnostic Decoding and Proximity-based Modality Ensemble

0

Sign in to get full access
Overview
- Presents a robust multimodal 3D object detection method that is agnostic to the input modality
- Combines multiple input modalities (e.g., RGB images, depth maps, LiDAR point clouds) using a proximity-based ensemble approach
- Aims to improve the performance and robustness of 3D object detection in diverse real-world scenarios
Plain English Explanation
This research paper introduces a new approach for 3D object detection that can work effectively with different types of sensor data, such as camera images, depth information, and LiDAR point clouds.
The key idea is to design a "modality-agnostic" system that can process these various input modalities without needing to know the specific type of data. This is achieved through a novel decoding approach that extracts features in a way that is independent of the input format.
To combine the information from multiple sensors, the method uses a "proximity-based modality ensemble" technique. This means that the system looks at how close or related the different sensor readings are for a given object and then intelligently fuses them to make a more accurate 3D detection.
The researchers demonstrate that this approach leads to improved performance and robustness compared to traditional multimodal 3D object detection methods, especially in challenging real-world scenarios where the sensor data may be incomplete or noisy.
Technical Explanation
The paper proposes a modality-agnostic 3D object detection framework that can effectively leverage diverse input modalities, such as RGB images, depth maps, and LiDAR point clouds, without requiring specialized processing for each type of data.
The key technical components are:
-
Modality-Agnostic Decoding: The system uses a shared encoder-decoder architecture that can extract features from the input data in a modality-agnostic way. This is achieved by designing the decoder to be independent of the specific input format, allowing it to process features from different modalities in a unified manner.
-
Proximity-based Modality Ensemble: To fuse the information from multiple input modalities, the method employs a proximity-based ensemble approach. This involves measuring the spatial and semantic proximity between the features extracted from each modality and then weighting their contributions to the final 3D object detection outputs based on these proximity scores.
-
Iterative Refinement: The system iteratively refines the 3D bounding box predictions by alternating between modality-agnostic decoding and proximity-based fusion, allowing it to progressively improve the detection accuracy.
The researchers evaluate their approach on several benchmark datasets for 3D object detection, including nuScenes and Waymo Open Dataset, and demonstrate that it outperforms state-of-the-art multimodal methods, particularly in challenging scenarios with missing or noisy sensor data.
Critical Analysis
The paper presents a well-designed and thoroughly evaluated approach to robust multimodal 3D object detection. The key strengths of the method include its modality-agnostic nature, which allows it to handle diverse sensor inputs, and the proximity-based ensemble strategy, which effectively fuses the complementary information from different modalities.
However, the paper does not address certain limitations and potential issues:
- The method's performance may still be sensitive to the quality and coverage of the input modalities, as the proximity-based fusion relies on the availability of sufficiently informative features from each modality.
- The iterative refinement process, while effective, may increase the computational complexity of the system, which could be a concern for real-time applications.
- The paper does not explore the potential for further improvements, such as incorporating learnable modality weighting schemes or exploring more advanced feature fusion techniques.
Additionally, the authors could have provided a more in-depth discussion of the potential real-world applications and the societal implications of their research, particularly in the context of autonomous driving and robotic systems.
Conclusion
This research paper presents a novel and robust multimodal 3D object detection framework that is agnostic to the input modality and leverages a proximity-based ensemble approach to effectively fuse information from diverse sensor data. The method demonstrates superior performance compared to state-of-the-art techniques, especially in challenging scenarios with incomplete or noisy sensor inputs.
The modality-agnostic decoding and proximity-based fusion components are key technical innovations that could have significant implications for the development of reliable and versatile 3D perception systems for autonomous vehicles, robots, and other real-world applications. The work contributes to the ongoing efforts to make multimodal sensing more robust and adaptable to diverse operating conditions.
While the paper has some limitations, it provides a solid foundation for further research and development in the field of multimodal 3D object detection, paving the way for more advanced and practical solutions in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Robust Multimodal 3D Object Detection via Modality-Agnostic Decoding and Proximity-based Modality Ensemble
Juhan Cha, Minseok Joo, Jihwan Park, Sanghyeok Lee, Injae Kim, Hyunwoo J. Kim
Recent advancements in 3D object detection have benefited from multi-modal information from the multi-view cameras and LiDAR sensors. However, the inherent disparities between the modalities pose substantial challenges. We observe that existing multi-modal 3D object detection methods heavily rely on the LiDAR sensor, treating the camera as an auxiliary modality for augmenting semantic details. This often leads to not only underutilization of camera data but also significant performance degradation in scenarios where LiDAR data is unavailable. Additionally, existing fusion methods overlook the detrimental impact of sensor noise induced by environmental changes, on detection performance. In this paper, we propose MEFormer to address the LiDAR over-reliance problem by harnessing critical information for 3D object detection from every available modality while concurrently safeguarding against corrupted signals during the fusion process. Specifically, we introduce Modality Agnostic Decoding (MOAD) that extracts geometric and semantic features with a shared transformer decoder regardless of input modalities and provides promising improvement with a single modality as well as multi-modality. Additionally, our Proximity-based Modality Ensemble (PME) module adaptively utilizes the strengths of each modality depending on the environment while mitigating the effects of a noisy sensor. Our MEFormer achieves state-of-the-art performance of 73.9% NDS and 71.5% mAP in the nuScenes validation set. Extensive analyses validate that our MEFormer improves robustness against challenging conditions such as sensor malfunctions or environmental changes. The source code is available at https://github.com/hanchaa/MEFormer
Read more8/20/2024
0
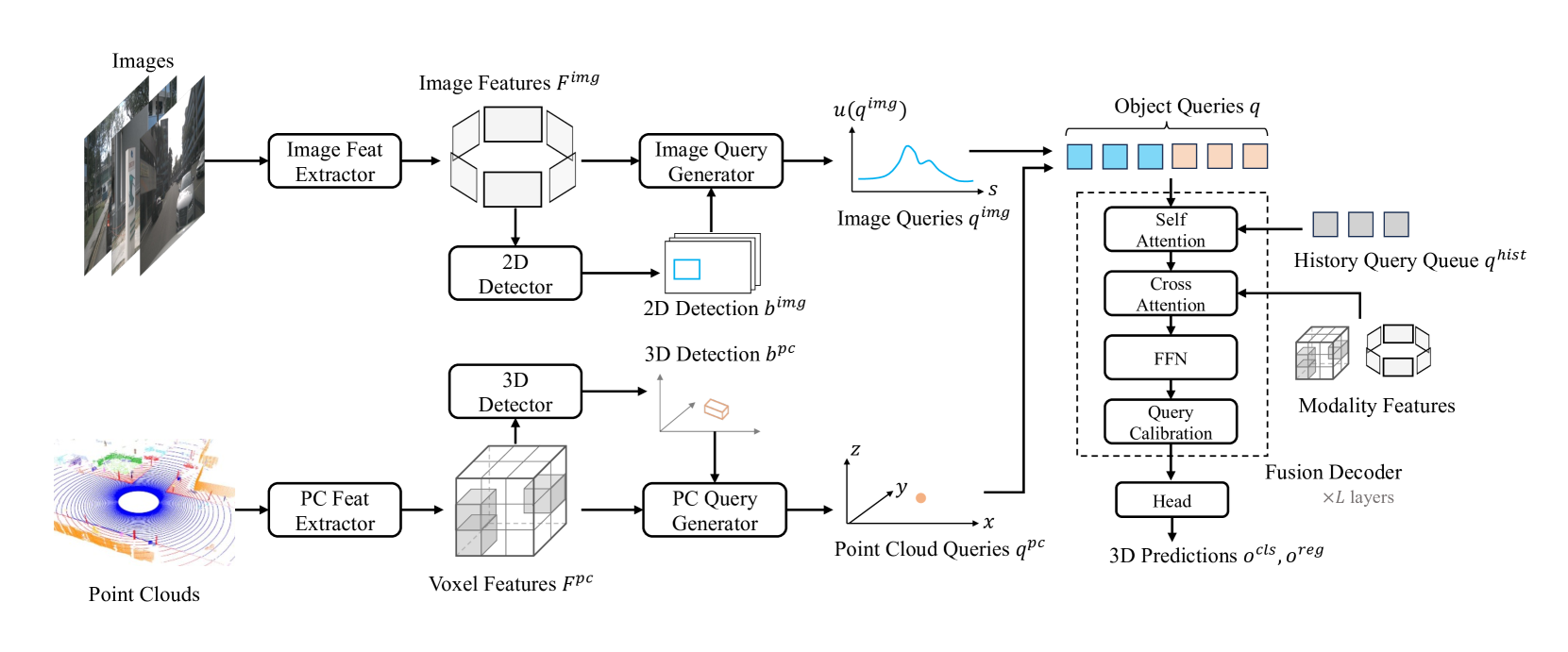
MV2DFusion: Leveraging Modality-Specific Object Semantics for Multi-Modal 3D Detection
Zitian Wang, Zehao Huang, Yulu Gao, Naiyan Wang, Si Liu
The rise of autonomous vehicles has significantly increased the demand for robust 3D object detection systems. While cameras and LiDAR sensors each offer unique advantages--cameras provide rich texture information and LiDAR offers precise 3D spatial data--relying on a single modality often leads to performance limitations. This paper introduces MV2DFusion, a multi-modal detection framework that integrates the strengths of both worlds through an advanced query-based fusion mechanism. By introducing an image query generator to align with image-specific attributes and a point cloud query generator, MV2DFusion effectively combines modality-specific object semantics without biasing toward one single modality. Then the sparse fusion process can be accomplished based on the valuable object semantics, ensuring efficient and accurate object detection across various scenarios. Our framework's flexibility allows it to integrate with any image and point cloud-based detectors, showcasing its adaptability and potential for future advancements. Extensive evaluations on the nuScenes and Argoverse2 datasets demonstrate that MV2DFusion achieves state-of-the-art performance, particularly excelling in long-range detection scenarios.
Read more8/13/2024

0
Multimodal Object Detection via Probabilistic a priori Information Integration
Hafsa El Hafyani, Bastien Pasdeloup, Camille Yver, Pierre Romenteau
Multimodal object detection has shown promise in remote sensing. However, multimodal data frequently encounter the problem of low-quality, wherein the modalities lack strict cell-to-cell alignment, leading to mismatch between different modalities. In this paper, we investigate multimodal object detection where only one modality contains the target object and the others provide crucial contextual information. We propose to resolve the alignment problem by converting the contextual binary information into probability maps. We then propose an early fusion architecture that we validate with extensive experiments on the DOTA dataset.
Read more5/27/2024
🔎
0
Multimodal Collaboration Networks for Geospatial Vehicle Detection in Dense, Occluded, and Large-Scale Events
Xin Wu, Zhanchao Huang, Li Wang, Jocelyn Chanussot, Jiaojiao Tian
In large-scale disaster events, the planning of optimal rescue routes depends on the object detection ability at the disaster scene, with one of the main challenges being the presence of dense and occluded objects. Existing methods, which are typically based on the RGB modality, struggle to distinguish targets with similar colors and textures in crowded environments and are unable to identify obscured objects. To this end, we first construct two multimodal dense and occlusion vehicle detection datasets for large-scale events, utilizing RGB and height map modalities. Based on these datasets, we propose a multimodal collaboration network for dense and occluded vehicle detection, MuDet for short. MuDet hierarchically enhances the completeness of discriminable information within and across modalities and differentiates between simple and complex samples. MuDet includes three main modules: Unimodal Feature Hierarchical Enhancement (Uni-Enh), Multimodal Cross Learning (Mul-Lea), and Hard-easy Discriminative (He-Dis) Pattern. Uni-Enh and Mul-Lea enhance the features within each modality and facilitate the cross-integration of features from two heterogeneous modalities. He-Dis effectively separates densely occluded vehicle targets with significant intra-class differences and minimal inter-class differences by defining and thresholding confidence values, thereby suppressing the complex background. Experimental results on two re-labeled multimodal benchmark datasets, the 4K-SAI-LCS dataset, and the ISPRS Potsdam dataset, demonstrate the robustness and generalization of the MuDet. The codes of this work are available openly at url{https://github.com/Shank2358/MuDet}.
Read more5/15/2024