RoFIR: Robust Fisheye Image Rectification Framework Impervious to Optical Center Deviation

0

Sign in to get full access
Overview
- This paper presents RoFIR, a novel transformer-based approach for robust fisheye image rectification.
- The key innovation is the use of a distortion vector map to guide the transformer, enabling it to effectively handle various types of fisheye distortion.
- The proposed method outperforms state-of-the-art techniques on multiple benchmarks, demonstrating its effectiveness in correcting fisheye distortion while preserving important image details.
Plain English Explanation
Fisheye cameras are a type of wide-angle lens that can capture a much broader view of a scene compared to regular cameras. However, this wider view also comes with significant distortion, where straight lines appear curved, and objects at the edges of the frame appear stretched or warped.
RoFIR: Distortion Vector Map Guided Transformer for Robust Fisheye Image Rectification presents a new approach to correcting this fisheye distortion, called RoFIR. The key innovation is the use of a distortion vector map, which is a visual representation of the distortion in the image. This map is used to guide a transformer neural network, helping it understand the specific patterns of distortion in the image and correct them more effectively.
Compared to other methods, RoFIR is more robust and can handle a wider range of fisheye distortion, including cases where the optical center of the camera is not at the center of the image. This is an important consideration, as real-world fisheye cameras often have this type of offset optical center, which can be challenging for some rectification techniques to handle.
The paper shows that RoFIR outperforms other state-of-the-art fisheye rectification methods on standard benchmark datasets, demonstrating its effectiveness in correcting distortion while preserving important details in the image. This could have practical applications in areas like augmented reality, autonomous vehicles, and surveillance systems, where accurate and robust fisheye image correction is crucial.
Technical Explanation
RoFIR: Distortion Vector Map Guided Transformer for Robust Fisheye Image Rectification proposes a novel transformer-based approach for fisheye image rectification, leveraging a distortion vector map to guide the network's rectification process.
The authors first generate a distortion vector map for each input fisheye image, which encodes the local distortion patterns. This map is then used as an additional input to a transformer-based network, along with the original fisheye image. The transformer is designed to learn the relationship between the distortion vector map and the required rectification, enabling it to handle a wide range of fisheye distortion types, including cases with offset optical centers.
The transformer architecture consists of an encoder and a decoder, where the encoder processes the input fisheye image and distortion vector map, and the decoder generates the rectified output image. The use of the distortion vector map helps the transformer network better understand the specific distortion characteristics of the input image, allowing it to perform more accurate and robust rectification.
The authors evaluate RoFIR on several benchmark datasets for fisheye image rectification, including Deep Ordinal Distortion Estimation, Location-Guided Head Pose Estimation, and Low-Light Image Enhancement datasets. The results show that RoFIR outperforms state-of-the-art methods in terms of both rectification quality and robustness to different types of fisheye distortion.
Critical Analysis
The RoFIR paper presents a compelling approach to fisheye image rectification, leveraging the power of transformer networks and a novel distortion vector map representation. The authors have demonstrated the effectiveness of their method on multiple benchmarks, showcasing its ability to handle a wide range of fisheye distortion patterns, including cases with offset optical centers.
One potential limitation of the RoFIR approach is that it requires the generation of the distortion vector map as an additional input to the transformer network. This could add computational complexity and make the system more sensitive to errors in the distortion vector estimation. It would be interesting to see if the authors could explore ways to integrate the distortion vector estimation directly into the transformer network, further streamlining the overall rectification process.
Additionally, the paper does not provide much insight into the specific types of distortion that RoFIR is particularly well-suited to handle, nor does it discuss the potential failure cases or limitations of the method. A more in-depth analysis of the method's performance across different distortion scenarios could help readers better understand the strengths and weaknesses of the approach.
Overall, the RoFIR paper presents a promising direction for robust fisheye image rectification, and the authors' use of a transformer-based architecture, guided by a distortion vector map, is a novel and interesting contribution to the field. Further exploration and refinement of this approach could lead to even more robust and practical solutions for correcting fisheye distortion in a wide range of applications.
Conclusion
RoFIR: Distortion Vector Map Guided Transformer for Robust Fisheye Image Rectification introduces a novel transformer-based approach for correcting fisheye image distortion. The key innovation is the use of a distortion vector map to guide the transformer network, enabling it to effectively handle a wide range of distortion patterns, including cases with offset optical centers.
The authors demonstrate that RoFIR outperforms state-of-the-art fisheye rectification methods on multiple benchmark datasets, showcasing its robustness and ability to preserve important image details during the rectification process. This work has the potential to significantly improve the performance of fisheye camera systems in various applications, such as augmented reality, autonomous vehicles, and surveillance, where accurate and reliable distortion correction is crucial.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
RoFIR: Robust Fisheye Image Rectification Framework Impervious to Optical Center Deviation
Zhaokang Liao, Hao Feng, Shaokai Liu, Wengang Zhou, Houqiang Li
Fisheye images are categorized fisheye into central and deviated based on the optical center position. Existing rectification methods are limited to central fisheye images, while this paper proposes a novel method that extends to deviated fisheye image rectification. The challenge lies in the variant global distortion distribution pattern caused by the random optical center position. To address this challenge, we propose a distortion vector map (DVM) that measures the degree and direction of local distortion. By learning the DVM, the model can independently identify local distortions at each pixel without relying on global distortion patterns. The model adopts a pre-training and fine-tuning training paradigm. In the pre-training stage, it predicts the distortion vector map and perceives the local distortion features of each pixel. In the fine-tuning stage, it predicts a pixel-wise flow map for deviated fisheye image rectification. We also propose a data augmentation method mixing central, deviated, and distorted-free images. Such data augmentation promotes the model performance in rectifying both central and deviated fisheye images, compared with models trained on single-type fisheye images. Extensive experiments demonstrate the effectiveness and superiority of the proposed method.
Read more6/28/2024
0
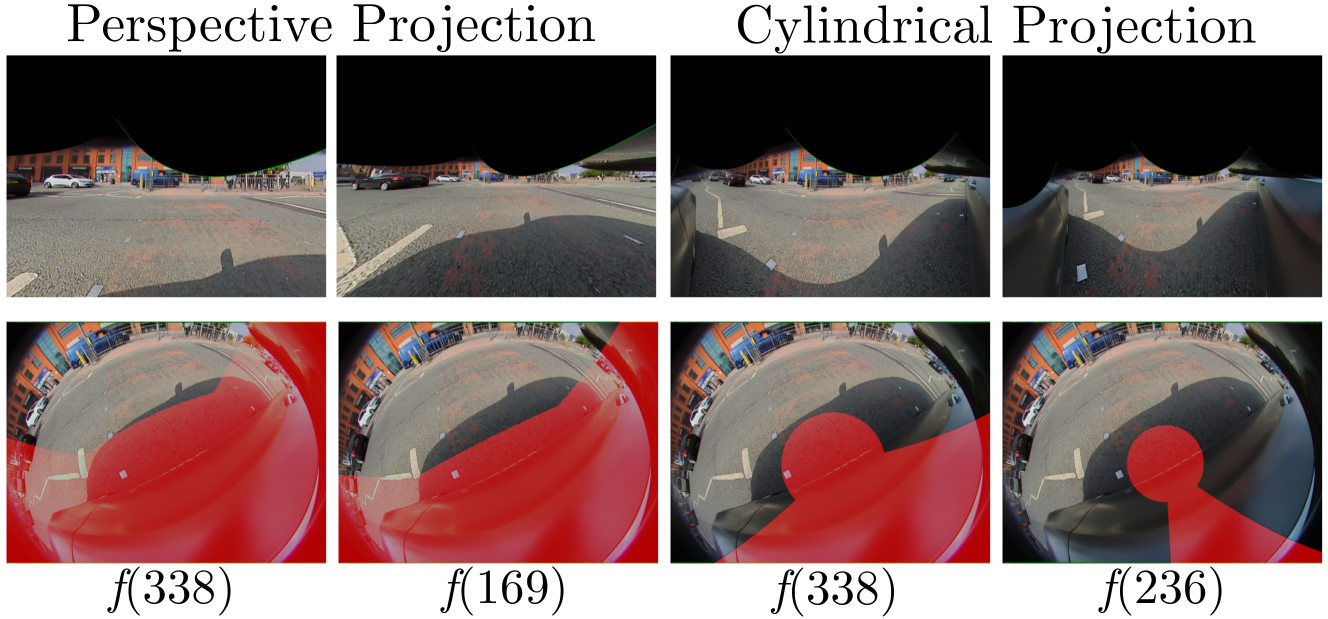
Adapting CNNs for Fisheye Cameras without Retraining
Ryan Griffiths, Donald G. Dansereau
The majority of image processing approaches assume images are in or can be rectified to a perspective projection. However, in many applications it is beneficial to use non conventional cameras, such as fisheye cameras, that have a larger field of view (FOV). The issue arises that these large-FOV images can't be rectified to a perspective projection without significant cropping of the original image. To address this issue we propose Rectified Convolutions (RectConv); a new approach for adapting pre-trained convolutional networks to operate with new non-perspective images, without any retraining. Replacing the convolutional layers of the network with RectConv layers allows the network to see both rectified patches and the entire FOV. We demonstrate RectConv adapting multiple pre-trained networks to perform segmentation and detection on fisheye imagery from two publicly available datasets. Our approach requires no additional data or training, and operates directly on the native image as captured from the camera. We believe this work is a step toward adapting the vast resources available for perspective images to operate across a broad range of camera geometries.
Read more4/15/2024
🤿
0
A Deep Ordinal Distortion Estimation Approach for Distortion Rectification
Kang Liao, Chunyu Lin, Yao Zhao
Distortion is widely existed in the images captured by popular wide-angle cameras and fisheye cameras. Despite the long history of distortion rectification, accurately estimating the distortion parameters from a single distorted image is still challenging. The main reason is these parameters are implicit to image features, influencing the networks to fully learn the distortion information. In this work, we propose a novel distortion rectification approach that can obtain more accurate parameters with higher efficiency. Our key insight is that distortion rectification can be cast as a problem of learning an ordinal distortion from a single distorted image. To solve this problem, we design a local-global associated estimation network that learns the ordinal distortion to approximate the realistic distortion distribution. In contrast to the implicit distortion parameters, the proposed ordinal distortion have more explicit relationship with image features, and thus significantly boosts the distortion perception of neural networks. Considering the redundancy of distortion information, our approach only uses a part of distorted image for the ordinal distortion estimation, showing promising applications in the efficient distortion rectification. To our knowledge, we first unify the heterogeneous distortion parameters into a learning-friendly intermediate representation through ordinal distortion, bridging the gap between image feature and distortion rectification. The experimental results demonstrate that our approach outperforms the state-of-the-art methods by a significant margin, with approximately 23% improvement on the quantitative evaluation while displaying the best performance on visual appearance. The code is available at https://github.com/KangLiao929/OrdinalDistortion.
Read more4/30/2024
🖼️
0
Location-guided Head Pose Estimation for Fisheye Image
Bing Li, Dong Zhang, Cheng Huang, Yun Xian, Ming Li, Dah-Jye Lee
Camera with a fisheye or ultra-wide lens covers a wide field of view that cannot be modeled by the perspective projection. Serious fisheye lens distortion in the peripheral region of the image leads to degraded performance of the existing head pose estimation models trained on undistorted images. This paper presents a new approach for head pose estimation that uses the knowledge of head location in the image to reduce the negative effect of fisheye distortion. We develop an end-to-end convolutional neural network to estimate the head pose with the multi-task learning of head pose and head location. Our proposed network estimates the head pose directly from the fisheye image without the operation of rectification or calibration. We also created a fisheye-distorted version of the three popular head pose estimation datasets, BIWI, 300W-LP, and AFLW2000 for our experiments. Experiments results show that our network remarkably improves the accuracy of head pose estimation compared with other state-of-the-art one-stage and two-stage methods.
Read more4/11/2024