Rollbot: a Spherical Robot Driven by a Single Actuator

0
Sign in to get full access
Overview
- Introduces a novel spherical robot called "Rollbot" that is driven by a single actuator
- Explores the design, dynamics, and control of this unique robotic system
- Presents experimental results demonstrating Rollbot's capabilities in various motion tasks
Plain English Explanation
The paper describes a new type of spherical robot called "Rollbot" that is driven by a single actuator. Unlike most robots, which use multiple motors or actuators to move, Rollbot uses a clever design to achieve complex motion with just a single actuator.
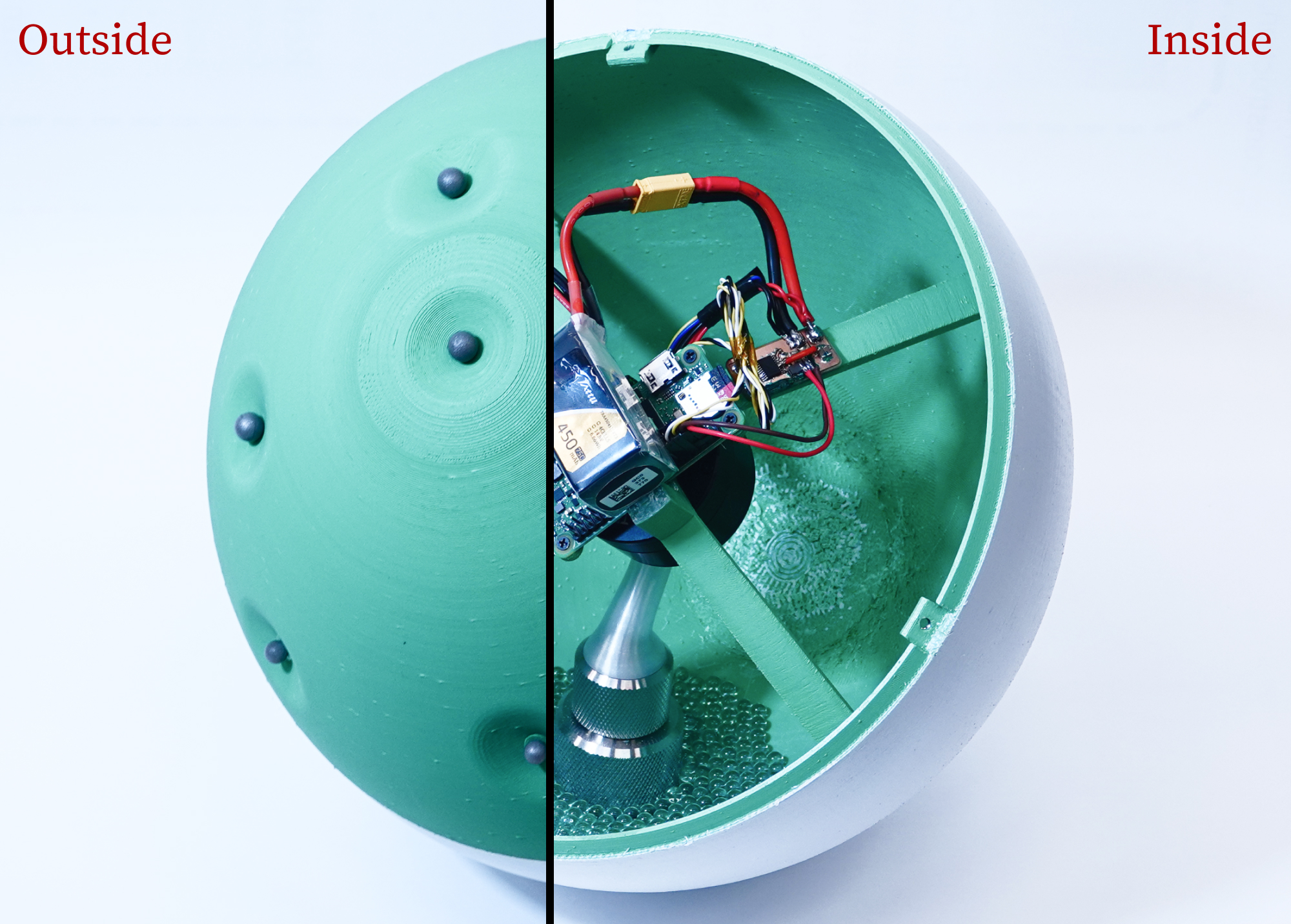
The core idea is to have a sphere-shaped body with the actuator positioned off-center. By carefully controlling the actuator, the researchers were able to make the Rollbot roll, spin, and even perform complex motions like jumping. This single-actuator design could lead to more compact, energy-efficient, and cost-effective robots compared to traditional multi-actuator systems.
The paper goes on to analyze the dynamics of the Rollbot system and develop control algorithms to precisely maneuver it. Through experiments, the researchers demonstrate Rollbot's capabilities in various motion tasks, showcasing its potential for applications like search and rescue, inspection, and manipulation.
Technical Explanation
The key innovation in the Rollbot design is the use of a single, off-center actuator to drive the spherical robot's motion. By carefully controlling the torque and position of this actuator, the researchers were able to achieve a wide range of motions, including rolling, spinning, and even jumping.
The paper provides a detailed analysis of the Rollbot's dynamics, deriving the equations of motion and identifying the key parameters that influence its behavior. The researchers then developed a control algorithm to precisely maneuver the robot, taking into account factors like friction, inertia, and the nonlinear dynamics of the system.
Through extensive experiments, the team demonstrated Rollbot's capabilities in various motion tasks, such as navigating through obstacles, traversing uneven terrain, and manipulating objects. The results showcase the potential of this unique robotic design for applications like search and rescue, inspection, and dexterous manipulation.
Critical Analysis
The paper presents a novel and innovative approach to designing a spherical robot with a single actuator. The researchers have done a commendable job in analyzing the dynamics of the Rollbot system and developing effective control algorithms to achieve complex motions.
However, the paper does not address some potential limitations of the Rollbot design. For example, the use of a single actuator may limit the robot's overall power and force capabilities, which could be a concern for certain applications. Additionally, the reliance on precise control of the actuator may make the system more vulnerable to disturbances or sensor errors.
Furthermore, the paper does not provide a comprehensive comparison of the Rollbot's performance and capabilities with other existing spherical robot designs, such as those that use multiple actuators or alternative locomotion mechanisms. Such a comparison could help contextualize the Rollbot's strengths and weaknesses and guide future research in this area.
Overall, the Rollbot represents an intriguing and promising approach to spherical robot design, but further research and development may be needed to address its potential limitations and fully unlock its potential for real-world applications.
Conclusion
The paper introduces a novel spherical robot called Rollbot, which is driven by a single actuator. The researchers have demonstrated that this unique design can achieve a wide range of complex motions, including rolling, spinning, and jumping, through careful analysis of the system's dynamics and the development of effective control algorithms.
The Rollbot's single-actuator design could lead to more compact, energy-efficient, and cost-effective robots compared to traditional multi-actuator systems, making it a promising candidate for applications such as search and rescue, inspection, and dexterous manipulation. Further research is needed to address the potential limitations of the Rollbot design and fully explore its capabilities and applications in the real world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Rollbot: a Spherical Robot Driven by a Single Actuator
Jingxian Wang, Michael Rubenstein
Here we present Rollbot, the first spherical robot capable of controllably maneuvering on 2D plane with a single actuator. Rollbot rolls on the ground in circular pattern and controls its motion by changing the curvature of the trajectory through accelerating and decelerating its single motor and attached mass. We present the theoretical analysis, design, and control of Rollbot, and demonstrate its ability to move in a controllable circular pattern and follow waypoints.
Read more4/9/2024
0
PCBot: a Minimalist Robot Designed for Swarm Applications
Jingxian Wang, Michael Rubenstein
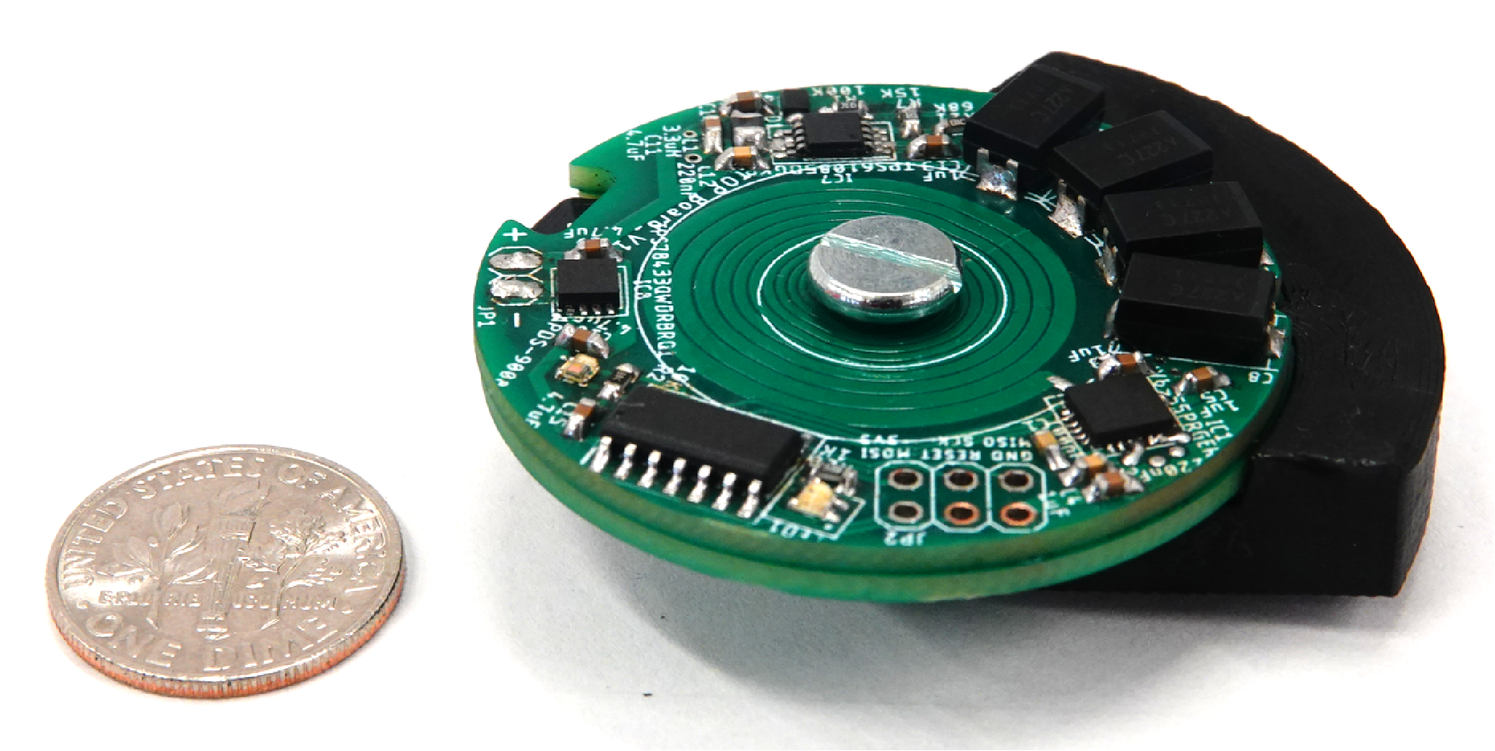
Complexity, cost, and power requirements for the actuation of individual robots can play a large factor in limiting the size of robotic swarms. Here we present PCBot, a minimalist robot that can precisely move on an orbital shake table using a bi-stable solenoid actuator built directly into its PCB. This allows the actuator to be built as part of the automated PCB manufacturing process, greatly reducing the impact it has on manual assembly. Thanks to this novel actuator design, PCBot has merely five major components and can be assembled in under 20 seconds, potentially enabling them to be easily mass-manufactured. Here we present the electro-magnetic and mechanical design of PCBot. Additionally, a prototype robot is used to demonstrate its ability to move in a straight line as well as follow given paths.
Read more4/9/2024
🛸
0
New!Exploiting Physical Human-Robot Interaction to Provide a Unique Rolling Experience with a Riding Ballbot
Chenzhang Xiao, Seung Yun Song, Yu Chen, Mahshid Mansouri, Jo~ao Ramos, Adam W. Bleakney, William R. Norris, Elizabeth T. Hsiao-Wecksler
This study introduces the development of hands-free control schemes for a riding ballbot, designed to allow riders including manual wheelchair users to control its movement through torso leaning and twisting. The hardware platform, Personal Unique Rolling Experience (PURE), utilizes a ballbot drivetrain, a dynamically stable mobile robot that uses a ball as its wheel to provide omnidirectional maneuverability. To accommodate users with varying torso motion functions, the hanads-free control scheme should be adjustable based on the rider's torso function and personal preferences. Therefore, concepts of (a) impedance control and (b) admittance control were integrated into the control scheme. A duo-agent optimization framework was utilized to assess the efficiency of this rider-ballbot system for a safety-critical task: braking from 1.4 m/s. The candidate control schemes were further implemented in the physical robot hardware and validated with two experienced users, demonstrating the efficiency and robustness of the hands-free admittance control scheme (HACS). This interface, which utilized physical human-robot interaction (pHRI) as the input, resulted in lower braking effort and shorter braking distance and time. Subsequently, 12 novice participants (six able-bodied users and six manual wheelchair users) with different levels of torso motion capability were then recruited to benchmark the braking performance with HACS. The indoor navigation capability of PURE was further demonstrated with these participants in courses simulating narrow hallways, tight turns, and navigation through static and dynamic obstacles. By exploiting pHRI, the proposed admittance-style control scheme provided effective control of the ballbot via torso motions. This interface enables PURE to provide a personal unique rolling experience to manual wheelchair users for safe and agile indoor navigation.
Read more9/30/2024
🤷
0
Design, modeling, and characteristics of ringshaped robot actuated by functional fluid
Zebing Mao, Xuehang Bai, Yanhong Peng, Yayi Shen
The controlled actuation of hydraulic and pneumatic actuators has unveiled fresh and thrilling opportunities for designing mobile robots with adaptable structures. Previously reported rolling robots, which were powered by fluidic systems, often relied on complex principles, cumbersome pump and valve systems, and intricate control strategies, limiting their applicability in other fields. In this investigation, we employed a distinct category of functional fluid identified as Electrohydrodynamic (EHD) fluid, serving as the pivotal element within the ring-shaped actuator. A short stream of functional fluid is placed within a fluidic channel and is then actuated by applying a direct current voltage aiming at shifting the center of mass of the robot and finally pushed the actuator to roll. We designed a ring-shaped fluidic robot, manufactured it using digital machining methods, and evaluated the robot's characteristics. Furthermore, we developed static and dynamic models to analyze the oscillation and rolling motion of the ring-shaped robots using the Lagrange method. This study is anticipated to contribute to the expansion of current research on EHD flexible actuators, enabling the realization of complex robotic systems.
Read more6/13/2024