PCBot: a Minimalist Robot Designed for Swarm Applications

0
Sign in to get full access
Overview
- The paper presents the design and development of a minimalist robot called PCBot, which is intended for swarm applications.
- PCBot is a compact and low-cost robot with a simple design and limited functionality, making it suitable for large-scale deployments in swarm robotics.
- The researchers focused on creating a robot that is easy to manufacture, maintain, and coordinate in a swarm environment.
Plain English Explanation
The researchers have created a new type of robot called PCBot that is designed to be used in swarm applications. Swarm robotics involves coordinating the actions of many small, simple robots to carry out tasks. The key idea behind PCBot is to make the robot as simple and inexpensive as possible, so that many of them can be used together.
PCBot has a very basic design, with just a few core components like motors, sensors, and a microcontroller. This simplicity helps keep the cost low and makes the robots easy to manufacture and maintain. The researchers prioritized creating a robot that could be easily mass-produced and deployed in large numbers, rather than building a highly capable individual robot.
The goal is that by having many simple PCBot robots working together as a swarm, they can collectively accomplish complex tasks that would be difficult for a single, more advanced robot to do on its own. The researchers believe this minimalist approach to robot design is well-suited for swarm applications, where the power comes from the collective behavior of the group rather than the sophistication of each individual robot.
Technical Explanation
The paper describes the design and development of PCBot, a minimalist robot intended for swarm robotics applications. The key design goals were to create a low-cost, compact, and easily manufacturable robot platform.
The PCBot design features a small circular base with two differential drive wheels, a single-board microcontroller, and a range of basic sensors including bump sensors, infrared distance sensors, and a compass. This stripped-down architecture was chosen to keep the robot simple and inexpensive, prioritizing mass-producibility over individual robot capabilities.
The researchers conducted experiments to validate the PCBot design, including tests of the mobility, sensing, and control systems. They demonstrated the robots' ability to navigate, avoid obstacles, and coordinate basic swarm behaviors like flocking and dispersion. The results indicate that the minimalist PCBot design can support fundamental swarm robotics functionality.
Critical Analysis
The PCBot approach represents a reasonable trade-off between robot complexity and swarm-level capabilities. By focusing on simplicity and low cost, the researchers have created a robot platform that could potentially be deployed in large numbers for swarm applications. This aligns with the growing interest in minimalist, distributed robotic systems for tasks like exploration, search and rescue, and environmental monitoring.
However, the limited individual capabilities of PCBot units may constrain the types of swarm behaviors and applications that can be achieved. More advanced sensing, actuation, or computational resources could enable richer swarm-level behaviors and coordination. Additionally, the reliance on basic sensors and control algorithms may make the swarm more susceptible to environmental challenges or interference.
Further research could explore ways to incrementally add capabilities to PCBot while preserving its minimalist design principles. Investigating robust swarm coordination methods, adaptive behaviors, and fault tolerance could also help address some of the potential limitations. Overall, the PCBot concept is a valuable contribution to the field of swarm robotics, but continued refinement and expansion may be needed to fully realize its potential.
Conclusion
The PCBot robot presented in this paper represents a minimalist, low-cost approach to swarm robotics. By prioritizing simplicity and mass-producibility over individual robot capabilities, the researchers have created a platform that could enable the deployment of large-scale robotic swarms for a variety of applications.
While the limited functionality of PCBot units may constrain the complexity of swarm behaviors, the overall concept demonstrates the potential of simple, distributed robotic systems to collectively achieve challenging tasks. Continued research and development in this area could lead to increasingly capable and versatile swarm robotics solutions that are accessible and scalable.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
PCBot: a Minimalist Robot Designed for Swarm Applications
Jingxian Wang, Michael Rubenstein
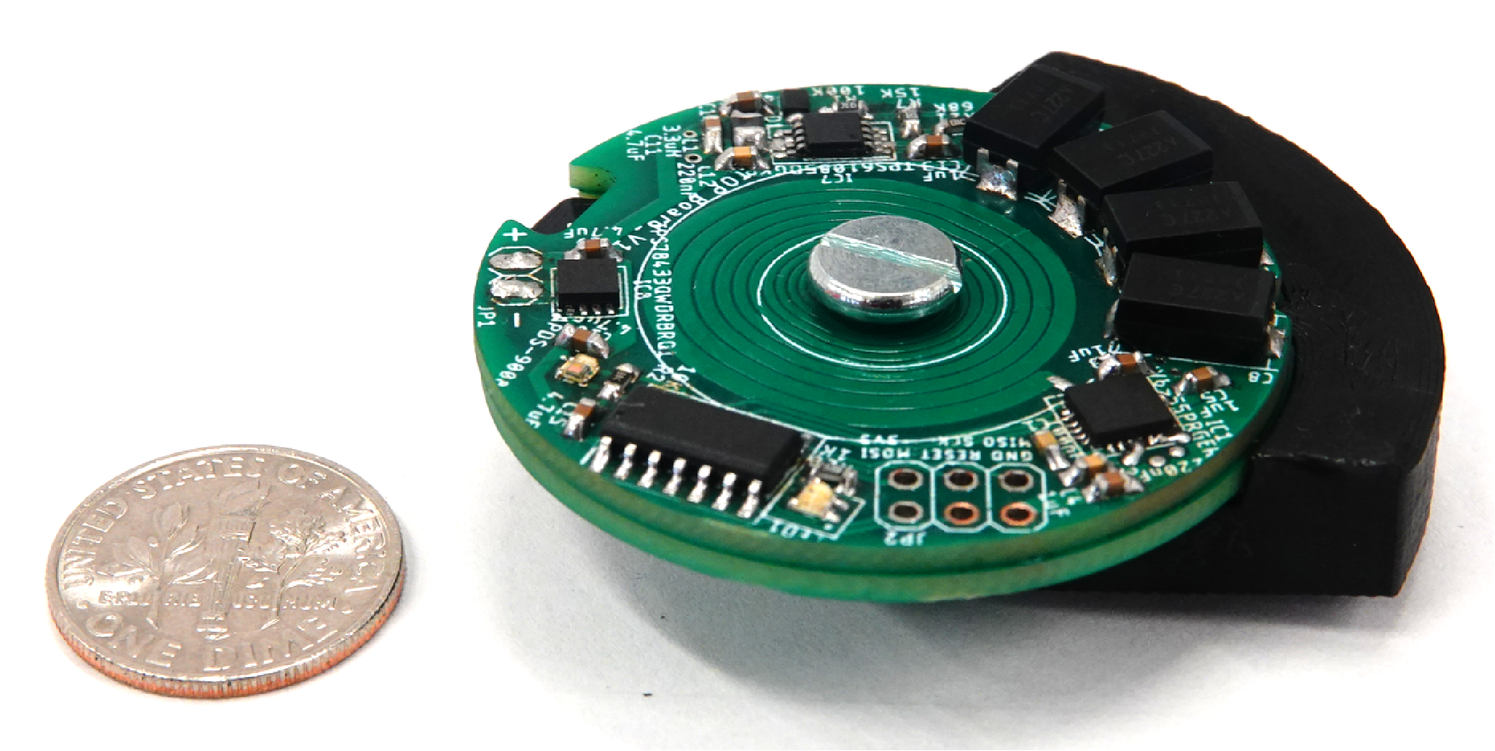
Complexity, cost, and power requirements for the actuation of individual robots can play a large factor in limiting the size of robotic swarms. Here we present PCBot, a minimalist robot that can precisely move on an orbital shake table using a bi-stable solenoid actuator built directly into its PCB. This allows the actuator to be built as part of the automated PCB manufacturing process, greatly reducing the impact it has on manual assembly. Thanks to this novel actuator design, PCBot has merely five major components and can be assembled in under 20 seconds, potentially enabling them to be easily mass-manufactured. Here we present the electro-magnetic and mechanical design of PCBot. Additionally, a prototype robot is used to demonstrate its ability to move in a straight line as well as follow given paths.
Read more4/9/2024
0
Rollbot: a Spherical Robot Driven by a Single Actuator
Jingxian Wang, Michael Rubenstein
Here we present Rollbot, the first spherical robot capable of controllably maneuvering on 2D plane with a single actuator. Rollbot rolls on the ground in circular pattern and controls its motion by changing the curvature of the trajectory through accelerating and decelerating its single motor and attached mass. We present the theoretical analysis, design, and control of Rollbot, and demonstrate its ability to move in a controllable circular pattern and follow waypoints.
Read more4/9/2024

0
Electrokinetic Propulsion for Electronically Integrated Microscopic Robots
Lucas C. Hanson, William H. Reinhardt, Scott Shrager, Tarunyaa Sivakumar, Marc Z. Miskin
Robots too small to see by eye have rapidly evolved in recent years thanks to the incorporation of on-board microelectronics. Semiconductor circuits have been used in microrobots capable of executing controlled wireless steering, prescribed legged gait patterns, and user-triggered transitions between digital states. Yet these promising new capabilities have come at the steep price of complicated fabrication. Even though circuit components can be reliably built by semiconductor foundries, currently available actuators for electronically integrated microrobots are built with intricate multi-step cleanroom protocols and use mechanisms like articulated legs or bubble generators that are hard to design and control. Here, we present a propulsion system for electronically integrated microrobots that can be built with a single step of lithographic processing, readily integrates with microelectronics thanks to low current/low voltage operation (1V, 10nA), and yields robots that swim at speeds over one body length per second. Inspired by work on micromotors, these robots generate electric fields in a surrounding fluid, and by extension propulsive electrokinetic flows. The underlying physics is captured by a model in which robot speed is proportional to applied current, making design and control straightforward. As proof, we build basic robots that use on-board circuits and a closed-loop optical control scheme to navigate waypoints and move in coordinated swarms. Broadly, solid-state propulsion clears the way for robust, easy to manufacture, electronically controlled microrobots that operate reliably over months to years.
Read more9/12/2024
🧪
0
Shakebot: A Low-cost, Open-source Robotic Shake Table for Earthquake Research and Education
Zhiang Chen, Devin Keating, Yash Shethwala, Aravind Adhith Pandian Saravanakumaran, Ramon Arrowsmith, Albert Kottke, Christine Wittich, Jnaneshwar Das
Shake tables serve as a critical tool for simulating earthquake events and testing the response of structures to seismic forces. However, existing shake tables are either expensive or proprietary. This paper presents the design and implementation of a low-cost, open-source shake table named textit{Shakebot} for earthquake engineering research and education, built using Robot Operating System (ROS) and principles of robotics. The Shakebot adapts affordable and high-accuracy components from 3D printers, particularly a closed-loop stepper motor for actuation and a toothed belt for transmission. The stepper motor enables the bed to reach a maximum horizontal acceleration of 11.8 $m/s^2$ (1.2 $mathbf{g}$), and velocity of 0.5 $m/s$, with a 2 $kg$ specimen. The Shakebot is equipped with an accelerometer and a high frame-rate camera for bed motion estimation. The low cost and easy use make the Shakebot accessible to a wide range of users, including students, educators, and researchers in resource-constrained settings. The Shakebot, along with its digital twin--a virtual shake robot--has showcased significant potential in advancing ground motion research. Specifically, this study examines the dynamics of precariously balanced rocks. The Shakebot provides an approach to validate the simulation through physical experiments. The ROS-based perception and motion software facilitates the code transition from our virtual shake robot to the physical Shakebot. The reuse of the control programs ensures that the implemented ground motions are consistent for both the simulation and physical experiments, which is critical to validate our simulation experiments.
Read more7/2/2024