RopeBEV: A Multi-Camera Roadside Perception Network in Bird's-Eye-View

0

Sign in to get full access
Overview
- RopeBEV is a multi-camera roadside perception network that generates a bird's-eye-view (BEV) representation of the environment
- The system combines data from multiple cameras mounted on the side of the road to create a comprehensive 360-degree view
- This BEV representation can be used for various applications like traffic monitoring, autonomous driving, and infrastructure inspection
Plain English Explanation
RopeBEV: A Multi-Camera Roadside Perception Network in Bird's-Eye-View is a research project that aims to create a detailed, 360-degree view of the area around a road. Instead of using a single camera on a vehicle, this system uses multiple cameras mounted on the side of the road to capture the scene from different angles.
By combining the data from these multiple cameras, the researchers are able to generate a "bird's-eye-view" or overhead perspective of the entire area. This BEV representation provides a comprehensive understanding of the road, vehicles, pedestrians, and other elements in the environment.
The researchers believe this type of system could be very useful for applications like traffic monitoring, autonomous driving, and infrastructure inspection. By having a complete, top-down view of the scene, analysts and autonomous systems can better understand what is happening and make more informed decisions.
Technical Explanation
RopeBEV uses a network of multiple cameras installed on the side of the road to capture a 360-degree view of the environment. The system then fuses the data from these cameras to generate a bird's-eye-view (BEV) representation of the scene.
The key components of the RopeBEV architecture include:
- Camera Calibration: The researchers first calibrate each of the roadside cameras to understand their individual positioning and orientation.
- BEV Projection: They then use the camera calibration information to project the 2D camera images into a common 3D BEV coordinate system.
- Multi-Camera Fusion: Next, the system fuses the BEV information from all the cameras to create a comprehensive 360-degree representation.
- Perception Tasks: Finally, the BEV data can be used to perform various perception tasks like vehicle detection, tracking, and behavior analysis.
The researchers evaluate RopeBEV on several real-world datasets and find that it outperforms existing single-camera BEV approaches. They also demonstrate the system's effectiveness for applications like traffic monitoring and autonomous driving.
Critical Analysis
The RopeBEV paper presents a promising approach for generating a bird's-eye-view of roadside environments using multiple cameras. The key strength of this system is its ability to provide a comprehensive 360-degree understanding of the scene, which can be valuable for a wide range of applications.
However, the paper does mention some limitations and areas for future work. For example, the researchers note that the system's performance can be affected by factors like camera calibration errors, occlusions, and environmental conditions. Additionally, the computational requirements of fusing multiple camera inputs may pose challenges for real-time deployment.
It would also be interesting to see further research on the long-term reliability and robustness of such a multi-camera system, as well as its scalability to larger road networks. Exploring ways to integrate the BEV representation with other sensor modalities, such as LiDAR or radar, could also be a fruitful direction for future work.
Overall, the RopeBEV project represents an important step forward in roadside perception and has the potential to enable a wide range of applications that benefit from a comprehensive, bird's-eye-view understanding of the environment.
Conclusion
RopeBEV is a multi-camera roadside perception system that generates a bird's-eye-view representation of the environment. By combining data from multiple cameras mounted on the side of the road, the system is able to create a comprehensive 360-degree understanding of the scene.
This BEV representation can be leveraged for various applications, such as traffic monitoring, autonomous driving, and infrastructure inspection. The researchers have demonstrated the effectiveness of their approach on real-world datasets, and the system's ability to provide a detailed, top-down view of the environment makes it a promising technology for the future of transportation and urban planning.
While the paper highlights some limitations and areas for further research, the RopeBEV project represents an important step forward in roadside perception and has the potential to significantly impact how we understand and manage our transportation systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
RopeBEV: A Multi-Camera Roadside Perception Network in Bird's-Eye-View
Jinrang Jia, Guangqi Yi, Yifeng Shi
Multi-camera perception methods in Bird's-Eye-View (BEV) have gained wide application in autonomous driving. However, due to the differences between roadside and vehicle-side scenarios, there currently lacks a multi-camera BEV solution in roadside. This paper systematically analyzes the key challenges in multi-camera BEV perception for roadside scenarios compared to vehicle-side. These challenges include the diversity in camera poses, the uncertainty in Camera numbers, the sparsity in perception regions, and the ambiguity in orientation angles. In response, we introduce RopeBEV, the first dense multi-camera BEV approach. RopeBEV introduces BEV augmentation to address the training balance issues caused by diverse camera poses. By incorporating CamMask and ROIMask (Region of Interest Mask), it supports variable camera numbers and sparse perception, respectively. Finally, camera rotation embedding is utilized to resolve orientation ambiguity. Our method ranks 1st on the real-world highway dataset RoScenes and demonstrates its practical value on a private urban dataset that covers more than 50 intersections and 600 cameras.
Read more9/19/2024

0
Improved Single Camera BEV Perception Using Multi-Camera Training
Daniel Busch, Ido Freeman, Richard Meyes, Tobias Meisen
Bird's Eye View (BEV) map prediction is essential for downstream autonomous driving tasks like trajectory prediction. In the past, this was accomplished through the use of a sophisticated sensor configuration that captured a surround view from multiple cameras. However, in large-scale production, cost efficiency is an optimization goal, so that using fewer cameras becomes more relevant. But the consequence of fewer input images correlates with a performance drop. This raises the problem of developing a BEV perception model that provides a sufficient performance on a low-cost sensor setup. Although, primarily relevant for inference time on production cars, this cost restriction is less problematic on a test vehicle during training. Therefore, the objective of our approach is to reduce the aforementioned performance drop as much as possible using a modern multi-camera surround view model reduced for single-camera inference. The approach includes three features, a modern masking technique, a cyclic Learning Rate (LR) schedule, and a feature reconstruction loss for supervising the transition from six-camera inputs to one-camera input during training. Our method outperforms versions trained strictly with one camera or strictly with six-camera surround view for single-camera inference resulting in reduced hallucination and better quality of the BEV map.
Read more9/5/2024

0
Benchmarking and Improving Bird's Eye View Perception Robustness in Autonomous Driving
Shaoyuan Xie, Lingdong Kong, Wenwei Zhang, Jiawei Ren, Liang Pan, Kai Chen, Ziwei Liu
Recent advancements in bird's eye view (BEV) representations have shown remarkable promise for in-vehicle 3D perception. However, while these methods have achieved impressive results on standard benchmarks, their robustness in varied conditions remains insufficiently assessed. In this study, we present RoboBEV, an extensive benchmark suite designed to evaluate the resilience of BEV algorithms. This suite incorporates a diverse set of camera corruption types, each examined over three severity levels. Our benchmarks also consider the impact of complete sensor failures that occur when using multi-modal models. Through RoboBEV, we assess 33 state-of-the-art BEV-based perception models spanning tasks like detection, map segmentation, depth estimation, and occupancy prediction. Our analyses reveal a noticeable correlation between the model's performance on in-distribution datasets and its resilience to out-of-distribution challenges. Our experimental results also underline the efficacy of strategies like pre-training and depth-free BEV transformations in enhancing robustness against out-of-distribution data. Furthermore, we observe that leveraging extensive temporal information significantly improves the model's robustness. Based on our observations, we design an effective robustness enhancement strategy based on the CLIP model. The insights from this study pave the way for the development of future BEV models that seamlessly combine accuracy with real-world robustness.
Read more5/28/2024
0
RoadBEV: Road Surface Reconstruction in Bird's Eye View
Tong Zhao, Lei Yang, Yichen Xie, Mingyu Ding, Masayoshi Tomizuka, Yintao Wei
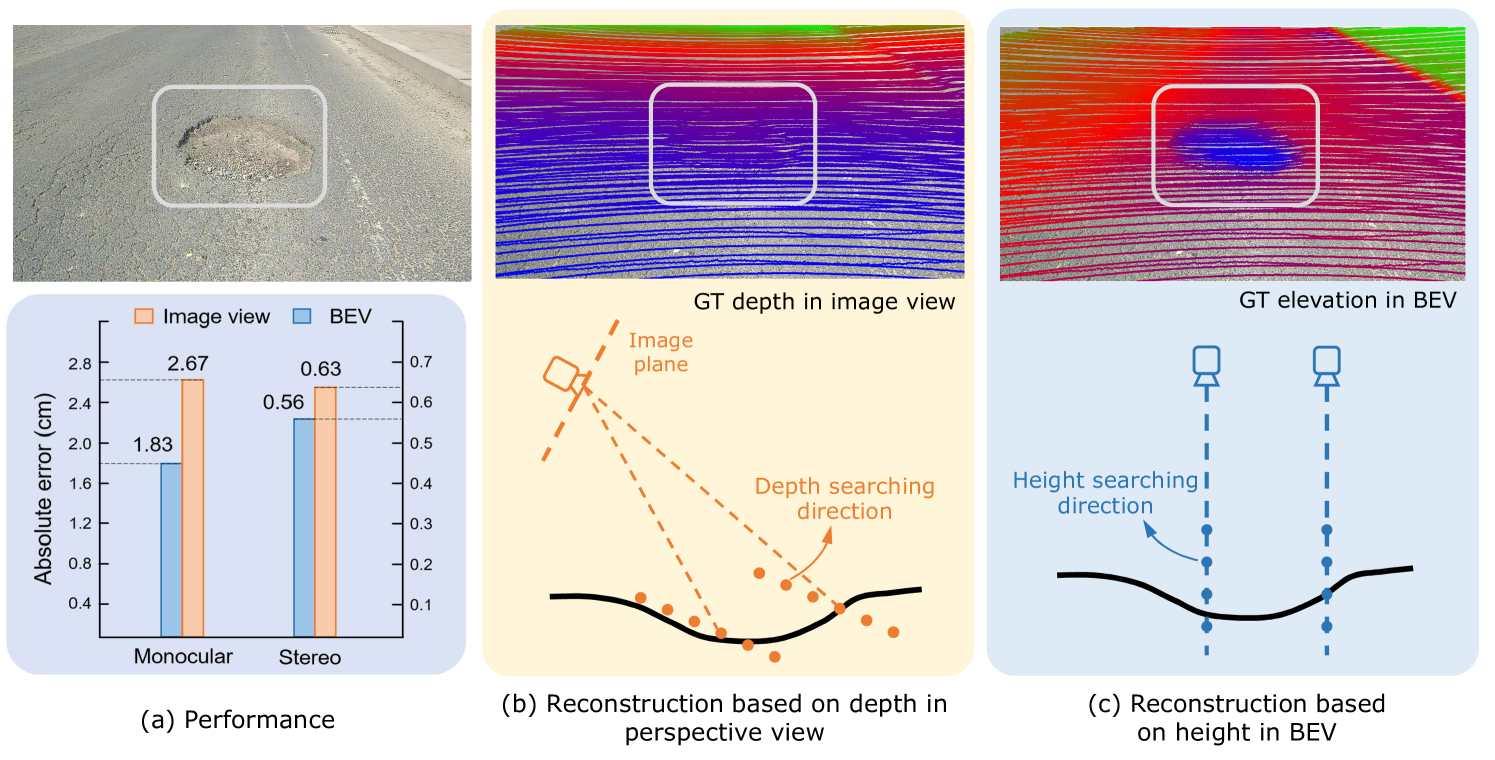
Road surface conditions, especially geometry profiles, enormously affect driving performance of autonomous vehicles. Vision-based online road reconstruction promisingly captures road information in advance. Existing solutions like monocular depth estimation and stereo matching suffer from modest performance. The recent technique of Bird's-Eye-View (BEV) perception provides immense potential to more reliable and accurate reconstruction. This paper uniformly proposes two simple yet effective models for road elevation reconstruction in BEV named RoadBEV-mono and RoadBEV-stereo, which estimate road elevation with monocular and stereo images, respectively. The former directly fits elevation values based on voxel features queried from image view, while the latter efficiently recognizes road elevation patterns based on BEV volume representing correlation between left and right voxel features. Insightful analyses reveal their consistence and difference with the perspective view. Experiments on real-world dataset verify the models' effectiveness and superiority. Elevation errors of RoadBEV-mono and RoadBEV-stereo achieve 1.83 cm and 0.50 cm, respectively. Our models are promising for practical road preview, providing essential information for promoting safety and comfort of autonomous vehicles. The code is released at https://github.com/ztsrxh/RoadBEV
Read more8/9/2024