Closing the Perception-Action Loop for Semantically Safe Navigation in Semi-Static Environments

0
📈
Sign in to get full access
Overview
- This paper presents a closed-loop perception-action pipeline for autonomous robots navigating in changing environments.
- The system encodes an online-constructed dense map, along with object-level semantic and consistency estimates into a control barrier function (CBF) to regulate safe regions in the scene.
- A model predictive controller (MPC) leverages the CBF-based safety constraints to adapt its navigation behaviour, which is crucial when potential scene changes occur.
Plain English Explanation
The paper describes a system that helps autonomous robots, like self-driving cars or robotic assistants, navigate safely in environments that are constantly changing. When robots operate in the real world, they face challenges like objects appearing, disappearing, or shifting over time. Traditional control methods often assume that the environment is static and known, but this paper presents a new approach to address these challenges.
The key idea is to combine a detailed 3D map of the environment with information about the objects in the scene, such as what they are and how they might move over time. This information is used to define "safe regions" that the robot can navigate within, avoiding collisions. A special control algorithm then uses this safety information to plan the robot's movements, adjusting its behavior when changes in the environment are detected.
By incorporating semantic understanding of the scene and anticipating how it might change, this system helps robots navigate more safely and adaptively in dynamic real-world environments, compared to traditional approaches. This could be particularly useful for autonomous robots operating in complex, changing settings where safety is critical.
Technical Explanation
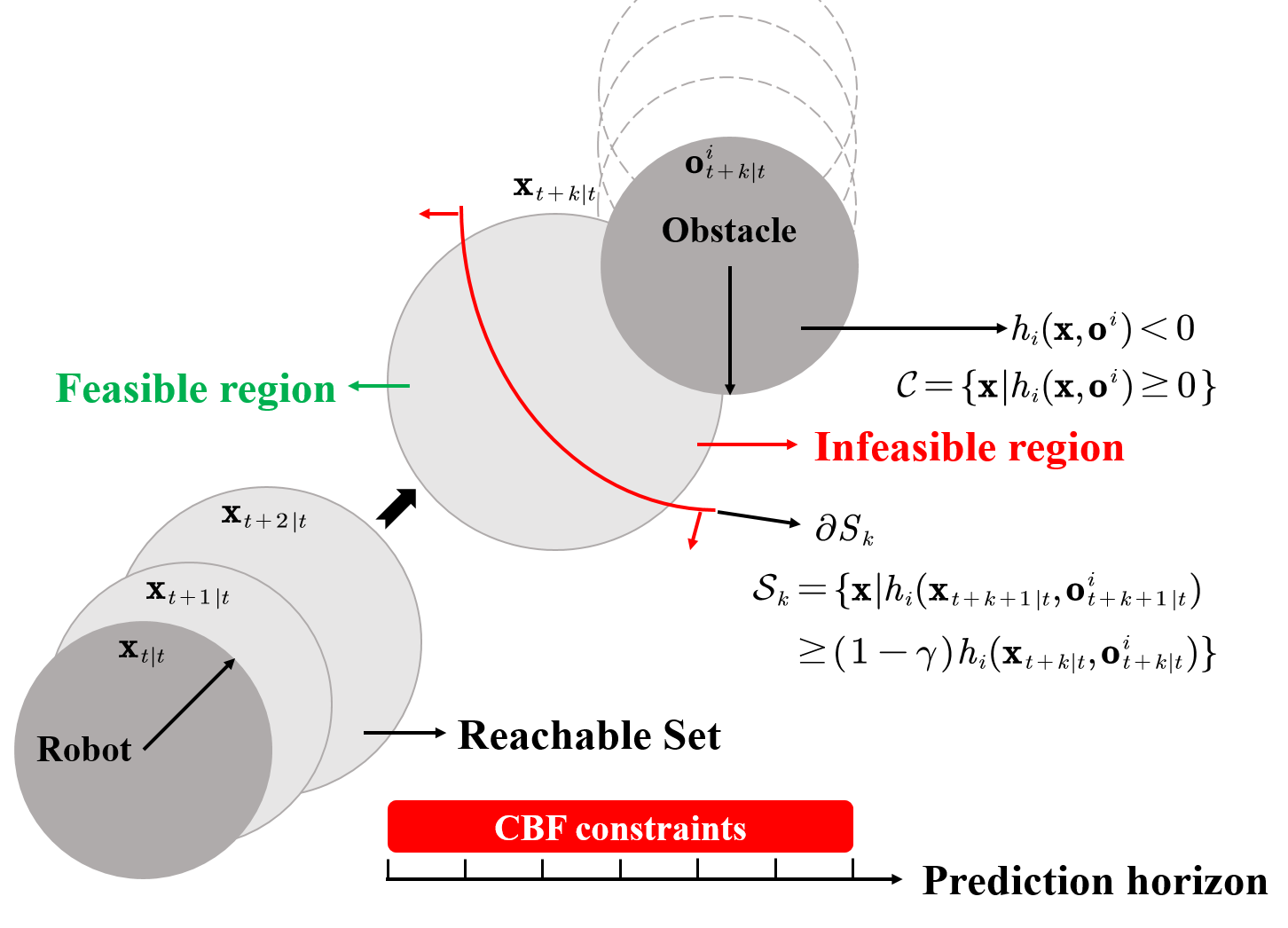
The paper presents a closed-loop perception-action pipeline for autonomous robot navigation in changing environments. The system builds an online-constructed dense 3D map of the environment, along with object-level semantic and consistency estimates. This information is encoded into a control barrier function (CBF), which defines safe regions in the scene that the robot can navigate within.
A model predictive controller (MPC) then leverages these CBF-based safety constraints to plan the robot's movements, adapting its behavior when potential changes in the environment are detected. This allows the robot to navigate more safely and robustly, compared to traditional control methods that assume a static, known environment.
The authors test their system in both simulated and real-world experiments, demonstrating the benefits of incorporating semantic information and scene change handling for robot behavior. The results validate the practical effectiveness of their closed-loop perception-action approach and its ability to map high-level semantic regions for safe navigation in dynamic environments.
Critical Analysis
The paper presents a compelling approach to address the challenges of autonomous robot navigation in changing environments. By integrating semantic understanding of the scene and anticipating potential changes, the system can more effectively plan safe, adaptive robot behavior compared to traditional control methods.
However, the paper does not discuss potential limitations or caveats of the approach. For example, the system's reliance on an accurate, up-to-date 3D map of the environment may be a practical challenge in real-world deployments, where map construction and maintenance can be non-trivial. Additionally, the semantic understanding of objects and their motion patterns may not always be perfect, which could lead to errors in the safety constraints.
Further research could explore ways to make the system more robust to imperfect or incomplete information, perhaps by incorporating techniques from robust control or active perception. Evaluating the system's performance in a wider range of dynamic environments and real-world scenarios would also help assess its practical limitations and guide future improvements.
Conclusion
This paper presents an innovative closed-loop perception-action pipeline that enables autonomous robots to navigate safely in changing environments. By encoding semantic scene information and anticipating potential changes into a control barrier function, the system can adaptively plan the robot's movements to avoid collisions and maintain safe operation.
The results demonstrate the benefits of this approach compared to traditional control methods, highlighting the importance of incorporating high-level understanding of the environment for robust robot navigation. As autonomous robots become more prevalent in our daily lives, advances like those described in this paper will be crucial for ensuring their safe and reliable operation in the real world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📈
0
Closing the Perception-Action Loop for Semantically Safe Navigation in Semi-Static Environments
Jingxing Qian, Siqi Zhou, Nicholas Jianrui Ren, Veronica Chatrath, Angela P. Schoellig
Autonomous robots navigating in changing environments demand adaptive navigation strategies for safe long-term operation. While many modern control paradigms offer theoretical guarantees, they often assume known extrinsic safety constraints, overlooking challenges when deployed in real-world environments where objects can appear, disappear, and shift over time. In this paper, we present a closed-loop perception-action pipeline that bridges this gap. Our system encodes an online-constructed dense map, along with object-level semantic and consistency estimates into a control barrier function (CBF) to regulate safe regions in the scene. A model predictive controller (MPC) leverages the CBF-based safety constraints to adapt its navigation behaviour, which is particularly crucial when potential scene changes occur. We test the system in simulations and real-world experiments to demonstrate the impact of semantic information and scene change handling on robot behavior, validating the practicality of our approach.
Read more4/24/2024

0
Neural Control Barrier Functions for Safe Navigation
Marvin Harms, Mihir Kulkarni, Nikhil Khedekar, Martin Jacquet, Kostas Alexis
Autonomous robot navigation can be particularly demanding, especially when the surrounding environment is not known and safety of the robot is crucial. This work relates to the synthesis of Control Barrier Functions (CBFs) through data for safe navigation in unknown environments. A novel methodology to jointly learn CBFs and corresponding safe controllers, in simulation, inspired by the State Dependent Riccati Equation (SDRE) is proposed. The CBF is used to obtain admissible commands from any nominal, possibly unsafe controller. An approach to apply the CBF inside a safety filter without the need for a consistent map or position estimate is developed. Subsequently, the resulting reactive safety filter is deployed on a multirotor platform integrating a LiDAR sensor both in simulation and real-world experiments.
Read more7/30/2024
0
Robot Safe Planning In Dynamic Environments Based On Model Predictive Control Using Control Barrier Function
Zetao Lu, Kaijun Feng, Jun Xu, Haoyao Chen, Yunjiang Lou
Implementing obstacle avoidance in dynamic environments is a challenging problem for robots. Model predictive control (MPC) is a popular strategy for dealing with this type of problem, and recent work mainly uses control barrier function (CBF) as hard constraints to ensure that the system state remains in the safe set. However, in crowded scenarios, effective solutions may not be obtained due to infeasibility problems, resulting in degraded controller performance. We propose a new MPC framework that integrates CBF to tackle the issue of obstacle avoidance in dynamic environments, in which the infeasibility problem induced by hard constraints operating over the whole prediction horizon is solved by softening the constraints and introducing exact penalty, prompting the robot to actively seek out new paths. At the same time, generalized CBF is extended as a single-step safety constraint of the controller to enhance the safety of the robot during navigation. The efficacy of the proposed method is first shown through simulation experiments, in which a double-integrator system and a unicycle system are employed, and the proposed method outperforms other controllers in terms of safety, feasibility, and navigation efficiency. Furthermore, real-world experiment on an MR1000 robot is implemented to demonstrate the effectiveness of the proposed method.
Read more4/10/2024
0
Visibility-Aware RRT* for Safety-Critical Navigation of Perception-Limited Robots in Unknown Environments
Taekyung Kim, Dimitra Panagou
Safe autonomous navigation in unknown environments remains a critical challenge for robots with limited sensing capabilities. While safety-critical control techniques, such as Control Barrier Functions (CBFs), have been proposed to ensure safety, their effectiveness relies on the assumption that the robot has complete knowledge of its surroundings. In reality, robots often operate with restricted field-of-view and finite sensing range, which can lead to collisions with unknown obstacles if the planning algorithm is agnostic to these limitations. To address this issue, we introduce the visibility-aware RRT* algorithm that combines sampling-based planning with CBFs to generate safe and efficient global reference paths in partially unknown environments. The algorithm incorporates a collision avoidance CBF and a novel visibility CBF, which guarantees that the robot remains within locally collision-free regions, enabling timely detection and avoidance of unknown obstacles. We conduct extensive experiments interfacing the path planners with two different safety-critical controllers, wherein our method outperforms all other compared baselines across both safety and efficiency aspects.
Read more6/13/2024