Safety Guaranteed Robust Multi-Agent Reinforcement Learning with Hierarchical Control for Connected and Automated Vehicles

0

Sign in to get full access
Overview
- This paper presents a safe and robust multi-agent reinforcement learning approach for connected autonomous vehicles (CAVs) operating under state perturbations.
- The proposed method aims to ensure the safety and robustness of CAVs in dynamic environments, where vehicles may experience unexpected state changes due to sensor errors or environmental factors.
- The authors develop a centralized multi-agent reinforcement learning framework that incorporates safety constraints and robustness to state perturbations.
Plain English Explanation
The paper focuses on developing a reinforcement learning system to control a group of self-driving cars (known as connected autonomous vehicles or CAVs) in a way that ensures their safety and robustness to unexpected changes in their environment.
Self-driving cars need to be able to navigate dynamic, real-world situations where there may be errors in the sensors or unpredictable factors in the environment that cause the car's understanding of its own state to change unexpectedly. The authors propose a centralized system that coordinates the decision-making of multiple self-driving cars, incorporating safety constraints and techniques to make the cars' behavior robust to these kinds of state perturbations.
The goal is to create a reinforcement learning system that can reliably control a fleet of self-driving cars, keeping them safe and on-course even when faced with unpredictable changes in their environment or sensors.
Technical Explanation
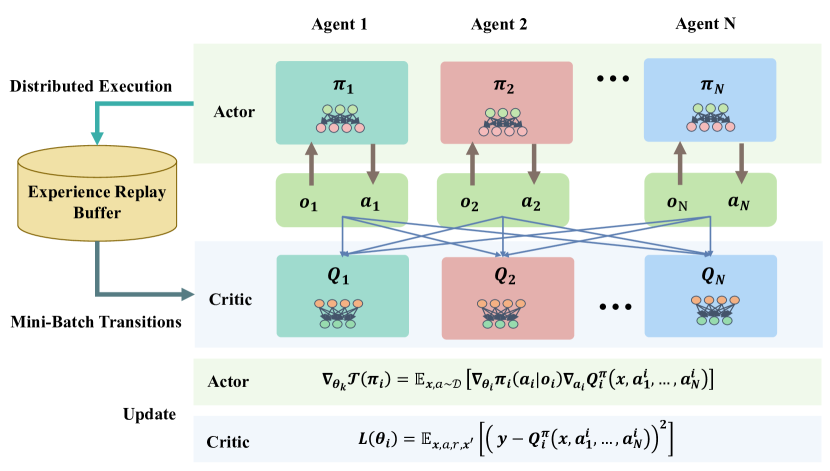
The paper presents a centralized multi-agent reinforcement learning (MARL) framework for controlling a network of connected autonomous vehicles (CAVs) in the presence of state perturbations.
The key elements of the approach include:
- Centralized MARL: The authors develop a centralized decision-making system that coordinates the actions of multiple CAVs, rather than having each vehicle act independently.
- Safety Constraints: The framework incorporates safety constraints to ensure the CAVs maintain a safe distance from each other and obstacles, even under state perturbations.
- Robustness to State Perturbations: The authors introduce techniques to make the MARL system more robust to unexpected changes in the CAVs' state information, which could arise from sensor errors or environmental factors.
The paper evaluates the proposed approach through simulations of CAVs navigating an intersection scenario. The results demonstrate that the method can achieve safe and efficient navigation of the CAVs, while maintaining robustness to state perturbations that may occur.
Critical Analysis
The paper presents a thoughtful approach to the important challenge of ensuring the safety and reliability of connected autonomous vehicles in dynamic, real-world environments. The authors' focus on incorporating safety constraints and robustness to state perturbations is well-justified, as these are key concerns for the deployment of self-driving car technologies.
However, the paper does not address certain practical considerations, such as the scalability of the centralized MARL framework to larger fleets of vehicles or the computational complexity of the approach. Additionally, the evaluation is limited to a single intersection scenario, and further testing in more diverse and complex environments would be valuable to fully assess the method's capabilities.
It would also be interesting to see the authors explore methods for distributing the decision-making process across the CAVs, rather than relying on a centralized system, as this could improve the system's resilience and adaptability.
Conclusion
This paper presents a promising approach to ensuring the safe and robust operation of connected autonomous vehicles in the face of state perturbations. By developing a centralized multi-agent reinforcement learning framework that incorporates safety constraints and robustness techniques, the authors have taken an important step towards realizing the potential of self-driving car technologies in dynamic, real-world environments.
While the paper has some limitations, it contributes valuable insights and a solid foundation for further research in this critical area of autonomous vehicle control and coordination.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Safety Guaranteed Robust Multi-Agent Reinforcement Learning with Hierarchical Control for Connected and Automated Vehicles
Zhili Zhang, H M Sabbir Ahmad, Ehsan Sabouni, Yanchao Sun, Furong Huang, Wenchao Li, Fei Miao
We address the problem of coordination and control of Connected and Automated Vehicles (CAVs) in the presence of imperfect observations in mixed traffic environment. A commonly used approach is learning-based decision-making, such as reinforcement learning (RL). However, most existing safe RL methods suffer from two limitations: (i) they assume accurate state information, and (ii) safety is generally defined over the expectation of the trajectories. It remains challenging to design optimal coordination between multi-agents while ensuring hard safety constraints under system state uncertainties (e.g., those that arise from noisy sensor measurements, communication, or state estimation methods) at every time step. We propose a safety guaranteed hierarchical coordination and control scheme called Safe-RMM to address the challenge. Specifically, the high-level coordination policy of CAVs in mixed traffic environment is trained by the Robust Multi-Agent Proximal Policy Optimization (RMAPPO) method. Though trained without uncertainty, our method leverages a worst-case Q network to ensure the model's robust performances when state uncertainties are present during testing. The low-level controller is implemented using model predictive control (MPC) with robust Control Barrier Functions (CBFs) to guarantee safety through their forward invariance property. We compare our method with baselines in different road networks in the CARLA simulator. Results show that our method provides best evaluated safety and efficiency in challenging mixed traffic environments with uncertainties.
Read more9/25/2024

0
Multi-Agent Reinforcement Learning with Control-Theoretic Safety Guarantees for Dynamic Network Bridging
Raffaele Galliera, Konstantinos Mitsopoulos, Niranjan Suri, Raffaele Romagnoli
Addressing complex cooperative tasks in safety-critical environments poses significant challenges for Multi-Agent Systems, especially under conditions of partial observability. This work introduces a hybrid approach that integrates Multi-Agent Reinforcement Learning with control-theoretic methods to ensure safe and efficient distributed strategies. Our contributions include a novel setpoint update algorithm that dynamically adjusts agents' positions to preserve safety conditions without compromising the mission's objectives. Through experimental validation, we demonstrate significant advantages over conventional MARL strategies, achieving comparable task performance with zero safety violations. Our findings indicate that integrating safe control with learning approaches not only enhances safety compliance but also achieves good performance in mission objectives.
Read more4/3/2024
0
Cooperative Decision-Making for CAVs at Unsignalized Intersections: A MARL Approach with Attention and Hierarchical Game Priors
Jiaqi Liu, Peng Hang, Xiaoxiang Na, Chao Huang, Jian Sun
The development of autonomous vehicles has shown great potential to enhance the efficiency and safety of transportation systems. However, the decision-making issue in complex human-machine mixed traffic scenarios, such as unsignalized intersections, remains a challenge for autonomous vehicles. While reinforcement learning (RL) has been used to solve complex decision-making problems, existing RL methods still have limitations in dealing with cooperative decision-making of multiple connected autonomous vehicles (CAVs), ensuring safety during exploration, and simulating realistic human driver behaviors. In this paper, a novel and efficient algorithm, Multi-Agent Game-prior Attention Deep Deterministic Policy Gradient (MA-GA-DDPG), is proposed to address these limitations. Our proposed algorithm formulates the decision-making problem of CAVs at unsignalized intersections as a decentralized multi-agent reinforcement learning problem and incorporates an attention mechanism to capture interaction dependencies between ego CAV and other agents. The attention weights between the ego vehicle and other agents are then used to screen interaction objects and obtain prior hierarchical game relations, based on which a safety inspector module is designed to improve the traffic safety. Furthermore, both simulation and hardware-in-the-loop experiments were conducted, demonstrating that our method outperforms other baseline approaches in terms of driving safety, efficiency, and comfort.
Read more9/10/2024

0
CARL: Congestion-Aware Reinforcement Learning for Imitation-based Perturbations in Mixed Traffic Control
Bibek Poudel, Weizi Li, Shuai Li
Human-driven vehicles (HVs) exhibit complex and diverse behaviors. Accurately modeling such behavior is crucial for validating Robot Vehicles (RVs) in simulation and realizing the potential of mixed traffic control. However, existing approaches like parameterized models and data-driven techniques struggle to capture the full complexity and diversity. To address this, in this work, we introduce CARL, a hybrid approach that combines imitation learning for close proximity car-following and probabilistic sampling for larger headways. We also propose two classes of RL-based RVs: a safety RV focused on maximizing safety and an efficiency RV focused on maximizing efficiency. Our experiments show that the safety RV increases Time-to-Collision above the critical 4-second threshold and reduces Deceleration Rate to Avoid a Crash by up to 80%, while the efficiency RV achieves improvements in throughput of up to 49%. These results demonstrate the effectiveness of CARL in enhancing both safety and efficiency in mixed traffic.
Read more7/10/2024