On Safety and Liveness Filtering Using Hamilton-Jacobi Reachability Analysis

0

Sign in to get full access
Overview
- The paper presents a method for safety and liveness filtering using Hamilton-Jacobi reachability analysis.
- This approach can be used to verify the safety and liveness of robot control systems.
- The method involves computing safe and viable sets of states for the robot system.
Plain English Explanation
Hamilton-Jacobi reachability analysis is a mathematical technique that can be used to analyze the behavior of complex systems, such as robotic control systems. In this paper, the authors show how this technique can be applied to verify the safety and liveness properties of a robot control system.
Safety is about ensuring that the robot never enters a dangerous or undesirable state, such as colliding with an obstacle. Liveness is about ensuring that the robot can always achieve its desired goal, such as reaching a target location. The authors use Hamilton-Jacobi reachability analysis to compute the "safe set" of states where the robot is guaranteed to be safe, and the "viable set" of states where the robot can still achieve its goal.
By comparing the robot's current state to these computed sets, the authors can determine whether the robot is operating safely and can still reach its goal. This information can then be used to "filter" the robot's control inputs, ensuring that it only takes actions that keep it within the safe and viable sets. This helps to ensure the overall safety and reliability of the robot's behavior.
Technical Explanation
The key steps of the authors' approach are:
- Modeling the robot's dynamics and constraints as a control system.
- Using Hamilton-Jacobi reachability analysis to compute the safe set of states (where the robot is guaranteed to be safe) and the viable set of states (where the robot can still achieve its goal).
- Comparing the robot's current state to the safe and viable sets to determine whether it is operating safely and can still reach its goal.
- Filtering the robot's control inputs to keep it within the safe and viable sets, ensuring overall safety and liveness.
The authors demonstrate their approach on a simulated robot navigation task, showing how it can effectively filter the robot's controls to keep it safe and able to reach its goal.
Critical Analysis
The authors acknowledge some limitations of their approach. For example, the computation of the safe and viable sets can be computationally expensive, especially for high-dimensional systems. Additionally, the method relies on an accurate model of the robot's dynamics, which may be difficult to obtain in practice.
Further research could explore ways to reduce the computational burden of the reachability analysis, or investigate techniques for learning or adapting the robot's model online to improve the accuracy of the analysis.
Overall, the authors present a promising approach for verifying the safety and liveness of robot control systems, which could be a valuable tool for ensuring the reliability and trustworthiness of autonomous robots in real-world applications.
Conclusion
The paper introduces a method for safety and liveness filtering of robot control systems using Hamilton-Jacobi reachability analysis. This technique allows for the computation of safe and viable sets of states, which can then be used to filter the robot's control inputs and ensure that it operates within safe and achievable boundaries.
The authors demonstrate the effectiveness of their approach on a simulated robot navigation task, but acknowledge some limitations around computational complexity and the need for an accurate system model. Further research in this area could lead to improved methods for verifying the safety and reliability of autonomous robotic systems, which is crucial for their widespread deployment in real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
On Safety and Liveness Filtering Using Hamilton-Jacobi Reachability Analysis
Javier Borquez, Kaustav Chakraborty, Hao Wang, Somil Bansal
Hamilton-Jacobi (HJ) reachability-based filtering provides a powerful framework to co-optimize performance and safety (or liveness) for autonomous systems. Under this filtering scheme, a nominal controller is minimally modified to ensure system safety or liveness. However, the resulting controllers can exhibit abrupt switching and bang-bang behavior, which is not suitable for applications of autonomous systems in the real world. This work presents a novel, unifying framework to design safety and liveness filters through reachability analysis. We explicitly characterize the maximal set of control inputs that ensures safety (or liveness) at a given state. Different safety filters can then be constructed using different subsets of this maximal set along with a projection operator to modify the nominal controller. We use the proposed framework to design three safety filters, each balancing performance, computation time, and smoothness differently. We highlight their relative strengths and limitations by applying these filters to autonomous navigation and rocket landing scenarios and on a physical robot testbed. We also discuss practical aspects associated with implementing these filters on real-world autonomous systems. Our research advances the understanding and potential application of reachability-based controllers on real-world autonomous systems.
Read more8/20/2024

0
Hamilton-Jacobi Reachability in Reinforcement Learning: A Survey
Milan Ganai, Sicun Gao, Sylvia Herbert
Recent literature has proposed approaches that learn control policies with high performance while maintaining safety guarantees. Synthesizing Hamilton-Jacobi (HJ) reachable sets has become an effective tool for verifying safety and supervising the training of reinforcement learning-based control policies for complex, high-dimensional systems. Previously, HJ reachability was restricted to verifying low-dimensional dynamical systems primarily because the computational complexity of the dynamic programming approach it relied on grows exponentially with the number of system states. In recent years, a litany of proposed methods addresses this limitation by computing the reachability value function simultaneously with learning control policies to scale HJ reachability analysis while still maintaining a reliable estimate of the true reachable set. These HJ reachability approximations are used to improve the safety, and even reward performance, of learned control policies and can solve challenging tasks such as those with dynamic obstacles and/or with lidar-based or vision-based observations. In this survey paper, we review the recent developments in the field of HJ reachability estimation in reinforcement learning that would provide a foundational basis for further research into reliability in high-dimensional systems.
Read more8/23/2024
📉
0
Parameter-Conditioned Reachable Sets for Updating Safety Assurances Online
Javier Borquez, Kensuke Nakamura, Somil Bansal
Hamilton-Jacobi (HJ) reachability analysis is a powerful tool for analyzing the safety of autonomous systems. However, the provided safety assurances are often predicated on the assumption that once deployed, the system or its environment does not evolve. Online, however, an autonomous system might experience changes in system dynamics, control authority, external disturbances, and/or the surrounding environment, requiring updated safety assurances. Rather than restarting the safety analysis from scratch, which can be time-consuming and often intractable to perform online, we propose to compute textit{parameter-conditioned} reachable sets. Assuming expected system and environment changes can be parameterized, we treat these parameters as virtual states in the system and leverage recent advances in high-dimensional reachability analysis to solve the corresponding reachability problem offline. This results in a family of reachable sets that is parameterized by the environment and system factors. Online, as these factors change, the system can simply query the corresponding safety function from this family to ensure system safety, enabling a real-time update of the safety assurances. Through various simulation studies, we demonstrate the capability of our approach in maintaining system safety despite the system and environment evolution.
Read more4/24/2024
0
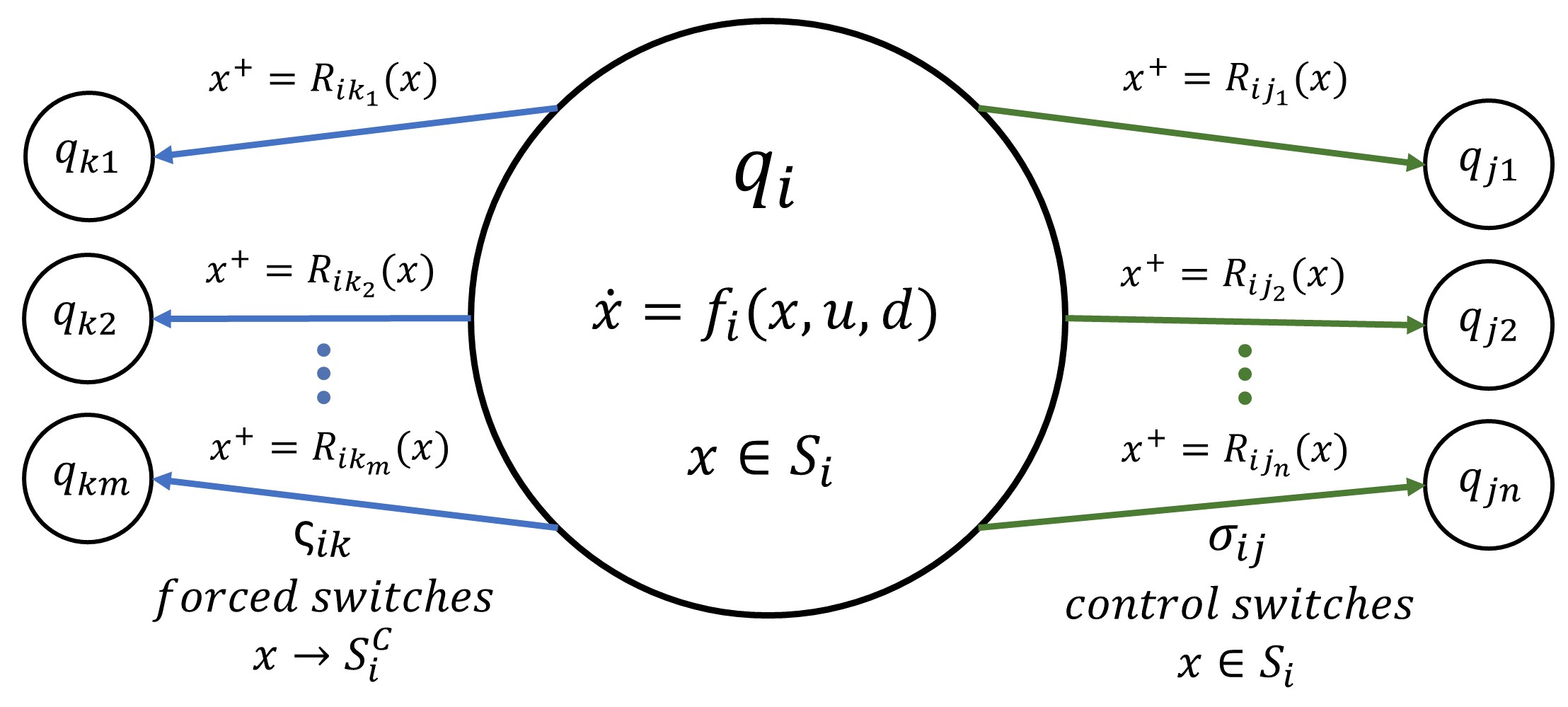
Hamilton-Jacobi Reachability Analysis for Hybrid Systems with Controlled and Forced Transitions
Javier Borquez, Shuang Peng, Yiyu Chen, Quan Nguyen, Somil Bansal
Hybrid dynamical systems with nonlinear dynamics are one of the most general modeling tools for representing robotic systems, especially contact-rich systems. However, providing guarantees regarding the safety or performance of nonlinear hybrid systems remains a challenging problem because it requires simultaneous reasoning about continuous state evolution and discrete mode switching. In this work, we address this problem by extending classical Hamilton-Jacobi (HJ) reachability analysis, a formal verification method for continuous-time nonlinear dynamical systems, to hybrid dynamical systems. We characterize the reachable sets for hybrid systems through a generalized value function defined over discrete and continuous states of the hybrid system. We also provide a numerical algorithm to compute this value function and obtain the reachable set. Our framework can compute reachable sets for hybrid systems consisting of multiple discrete modes, each with its own set of nonlinear continuous dynamics, discrete transitions that can be directly commanded or forced by a discrete control input, while still accounting for control bounds and adversarial disturbances in the state evolution. Along with the reachable set, the proposed framework also provides an optimal continuous and discrete controller to ensure system safety. We demonstrate our framework in several simulation case studies, as well as on a real-world testbed to solve the optimal mode planning problem for a quadruped with multiple gaits.
Read more6/26/2024