Safety Metric Aware Trajectory Repairing for Automated Driving

0

Sign in to get full access
Overview
- The paper introduces a novel approach for repairing trajectories of automated vehicles to improve safety.
- It proposes a "safety metric aware trajectory repairing" method that considers various safety factors during the trajectory planning process.
- This method aims to generate safe and feasible trajectories for automated driving systems.
Plain English Explanation
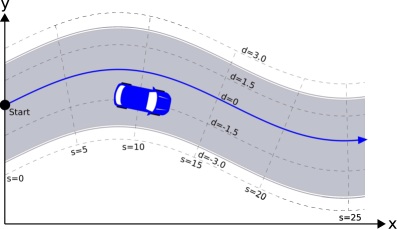
The paper focuses on improving the safety of automated driving systems by modifying the trajectories, or paths, that the vehicle follows. Automated vehicles rely on complex planning algorithms to determine the best trajectory to reach their destination. However, these algorithms don't always produce the safest possible trajectory.
The researchers developed a new method that takes various safety factors into account when planning the vehicle's trajectory. This includes considering the vehicle's speed, the distance to obstacles, the curvature of the road, and other important safety metrics. By incorporating these safety metrics, the method can adjust the trajectory to make it safer and more suitable for automated driving.
For example, if the original trajectory would require the vehicle to take a sharp turn at high speed, the new method might adjust the trajectory to reduce the speed and make the turn more gradual. This helps ensure the vehicle can navigate the turn safely and avoid potential collisions.
The key idea is to repair or modify the trajectory in a way that prioritizes safety, rather than just optimizing for factors like travel time or fuel efficiency. This can help make automated driving systems more reliable and trustworthy, which is crucial for wider adoption of this technology.
Technical Explanation
The paper proposes a "safety metric aware trajectory repairing" (SMATR) method for automated driving systems. This method takes an initial trajectory generated by a planning algorithm and modifies it to improve safety, considering various safety factors.
The SMATR approach consists of two main components:
-
Safety Metric Evaluation: The method first evaluates the safety of the initial trajectory using a set of safety metrics, such as speed, acceleration, jerk, distance to obstacles, and road curvature. These metrics are combined into a single safety score that quantifies the overall safety of the trajectory.
-
Trajectory Repair: Based on the safety evaluation, the method then repairs the trajectory by adjusting its shape and parameters to improve the safety score. This is done through an optimization process that minimizes a cost function incorporating the safety metrics.
The authors demonstrate the effectiveness of the SMATR method through simulations and experiments on a test track. They show that the repaired trajectories generated by their approach are significantly safer than the initial trajectories, without compromising other performance factors like travel time.
Critical Analysis
The paper provides a valuable contribution to the field of automated driving by addressing the important issue of safety in trajectory planning. The proposed SMATR method offers a practical solution for incorporating safety considerations into the trajectory generation process, which is a crucial aspect for the widespread adoption of autonomous vehicles.
One potential limitation of the research is the specific set of safety metrics used, which may not capture all relevant factors that affect the safety of a trajectory. The authors acknowledge this and suggest that the method could be extended to incorporate additional safety metrics as needed.
Another area for further research could be the integration of the SMATR method with other trajectory planning and control algorithms, as well as its evaluation in more complex real-world scenarios beyond the test track environment.
Conclusion
The "Safety Metric Aware Trajectory Repairing" (SMATR) method presented in this paper represents a significant advancement in the field of automated driving. By considering various safety factors during the trajectory planning process, the SMATR approach can generate trajectories that are safer and more suitable for autonomous vehicle operation.
The successful demonstration of the SMATR method in simulations and experiments suggests its potential for improving the reliability and safety of automated driving systems, which is a critical step towards the widespread adoption of this transformative technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Safety Metric Aware Trajectory Repairing for Automated Driving
Kailin Tong, Berin Dikic, Wenbo Xiao, Martin Steinberger, Martin Horn, Selim Solmaz
Recent analyses highlight challenges in autonomous vehicle technologies, particularly failures in decision-making under dynamic or emergency conditions. Traditional automated driving systems recalculate the entire trajectory in a changing environment. Instead, a novel approach retains valid trajectory segments, minimizing the need for complete replanning and reducing changes to the original plan. This work introduces a trajectory repairing framework that calculates a feasible evasive trajectory while computing the Feasible Time-to-React (F-TTR), balancing the maintenance of the original plan with safety assurance. The framework employs a binary search algorithm to iteratively create repaired trajectories, guaranteeing both the safety and feasibility of the trajectory repairing result. In contrast to earlier approaches that separated the calculation of safety metrics from trajectory repairing, which resulted in unsuccessful plans for evasive maneuvers, our work has the anytime capability to provide both a Feasible Time-to-React and an evasive trajectory for further execution.
Read more8/21/2024

0
A survey on robustness in trajectory prediction for autonomous vehicles
Jeroen Hagenus, Frederik Baymler Mathiesen, Julian F. Schumann, Arkady Zgonnikov
Autonomous vehicles rely on accurate trajectory prediction to inform decision-making processes related to navigation and collision avoidance. However, current trajectory prediction models show signs of overfitting, which may lead to unsafe or suboptimal behavior. To address these challenges, this paper presents a comprehensive framework that categorizes and assesses the definitions and strategies used in the literature on evaluating and improving the robustness of trajectory prediction models. This involves a detailed exploration of various approaches, including data slicing methods, perturbation techniques, model architecture changes, and post-training adjustments. In the literature, we see many promising methods for increasing robustness, which are necessary for safe and reliable autonomous driving.
Read more4/23/2024
🔮
0
Risk-Aware Vehicle Trajectory Prediction Under Safety-Critical Scenarios
Qingfan Wang, Dongyang Xu, Gaoyuan Kuang, Chen Lv, Shengbo Eben Li, Bingbing Nie
Trajectory prediction is significant for intelligent vehicles to achieve high-level autonomous driving, and a lot of relevant research achievements have been made recently. Despite the rapid development, most existing studies solely focused on normal safe scenarios while largely neglecting safety-critical scenarios, particularly those involving imminent collisions. This oversight may result in autonomous vehicles lacking the essential predictive ability in such situations, posing a significant threat to safety. To tackle these, this paper proposes a risk-aware trajectory prediction framework tailored to safety-critical scenarios. Leveraging distinctive hazardous features, we develop three core risk-aware components. First, we introduce a risk-incorporated scene encoder, which augments conventional encoders with quantitative risk information to achieve risk-aware encoding of hazardous scene contexts. Next, we incorporate endpoint-risk-combined intention queries as prediction priors in the decoder to ensure that the predicted multimodal trajectories cover both various spatial intentions and risk levels. Lastly, an auxiliary risk prediction task is implemented for the ultimate risk-aware prediction. Furthermore, to support model training and performance evaluation, we introduce a safety-critical trajectory prediction dataset and tailored evaluation metrics. We conduct comprehensive evaluations and compare our model with several SOTA models. Results demonstrate the superior performance of our model, with a significant improvement in most metrics. This prediction advancement enables autonomous vehicles to execute correct collision avoidance maneuvers under safety-critical scenarios, eventually enhancing road traffic safety.
Read more7/19/2024
0
An Online Spatial-Temporal Graph Trajectory Planner for Autonomous Vehicles
Jilan Samiuddin, Benoit Boulet, Di Wu
The autonomous driving industry is expected to grow by over 20 times in the coming decade and, thus, motivate researchers to delve into it. The primary focus of their research is to ensure safety, comfort, and efficiency. An autonomous vehicle has several modules responsible for one or more of the aforementioned items. Among these modules, the trajectory planner plays a pivotal role in the safety of the vehicle and the comfort of its passengers. The module is also responsible for respecting kinematic constraints and any applicable road constraints. In this paper, a novel online spatial-temporal graph trajectory planner is introduced to generate safe and comfortable trajectories. First, a spatial-temporal graph is constructed using the autonomous vehicle, its surrounding vehicles, and virtual nodes along the road with respect to the vehicle itself. Next, the graph is forwarded into a sequential network to obtain the desired states. To support the planner, a simple behavioral layer is also presented that determines kinematic constraints for the planner. Furthermore, a novel potential function is also proposed to train the network. Finally, the proposed planner is tested on three different complex driving tasks, and the performance is compared with two frequently used methods. The results show that the proposed planner generates safe and feasible trajectories while achieving similar or longer distances in the forward direction and comparable comfort ride.
Read more4/19/2024