A Safe and Efficient Self-evolving Algorithm for Decision-making and Control of Autonomous Driving Systems

0
Sign in to get full access
Overview
- This paper presents a safe and efficient self-evolving algorithm for decision-making and control of autonomous driving systems.
- The algorithm uses reinforcement learning to autonomously adapt and improve its performance over time.
- Key features include safety guarantees, efficient learning, and the ability to handle complex driving scenarios.
Plain English Explanation
The paper describes a new algorithm for autonomous driving that can learn and improve itself over time. Rather than relying on pre-programmed rules, the algorithm uses reinforcement learning to autonomously adapt its decision-making based on real-world driving experience.
The core idea is to give the algorithm the ability to explore different actions and strategies, but with safety guardrails in place to prevent unsafe behaviors. This allows the algorithm to efficiently learn optimal driving policies without compromising safety.
The algorithm is designed to handle complex driving scenarios, such as navigating through busy intersections or merging onto highways. It can continually refine its skills, learning from both positive and negative experiences to become more capable over time.
By using this self-evolving approach, the authors aim to create autonomous driving systems that are both safe and efficient, able to adapt to a wide range of driving conditions without the need for extensive manual programming or tuning.
Technical Explanation
The paper proposes a self-evolving algorithm for autonomous driving that combines reinforcement learning with safety constraints.
The algorithm uses a neural network-based policy model to make real-time decisions about vehicle control, such as steering, acceleration, and braking. During training, the policy model interacts with a simulated driving environment and receives rewards or penalties based on its performance.
A key innovation is the inclusion of a safety module that monitors the vehicle's state and intervenes if the policy model proposes an unsafe action. This safety module acts as a gatekeeper, preventing the vehicle from taking actions that could lead to collisions or other dangerous situations.
The training process involves alternating between exploration and exploitation. During exploration phases, the algorithm tries out new strategies to discover better policies. During exploitation phases, it refines and solidifies the current policy.
The authors demonstrate the effectiveness of their approach through extensive simulations, showing that the self-evolving algorithm can learn efficient and safe driving policies that outperform traditional rule-based systems.
Critical Analysis
The paper presents a promising approach to autonomous driving that addresses important safety and efficiency concerns. The inclusion of the safety module is a critical component, as it helps ensure that the algorithm does not learn policies that put the vehicle or its occupants at risk.
However, the authors acknowledge that their simulation-based evaluation may not fully capture the complexities of real-world driving environments. Further testing and validation on physical vehicles would be necessary to fully assess the algorithm's performance and robustness.
Additionally, the paper does not discuss potential issues related to the algorithm's interpretability and transparency. In safety-critical applications like autonomous driving, it is important to understand how the algorithm arrives at its decisions, which may be challenging for complex neural network-based models.
Future research could explore ways to [improve the algorithm's deep reinforcement learning capabilities while maintaining strong safety guarantees, as well as investigating methods to enhance the algorithm's interpretability and explainability.
Conclusion
This paper presents a novel self-evolving algorithm for autonomous driving that combines reinforcement learning with safety constraints. The algorithm is designed to learn efficient and safe driving policies that can adapt to complex scenarios, potentially offering a significant advancement in the field of self-driving technology.
While the simulation-based results are promising, further real-world testing and validation, as well as research into interpretability and transparency, will be crucial to ensure the algorithm's practical deployment and acceptance. Overall, this work represents an important step towards the development of truly safe and capable autonomous driving systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Safe and Efficient Self-evolving Algorithm for Decision-making and Control of Autonomous Driving Systems
Shuo Yang, Liwen Wang, Yanjun Huang, Hong Chen
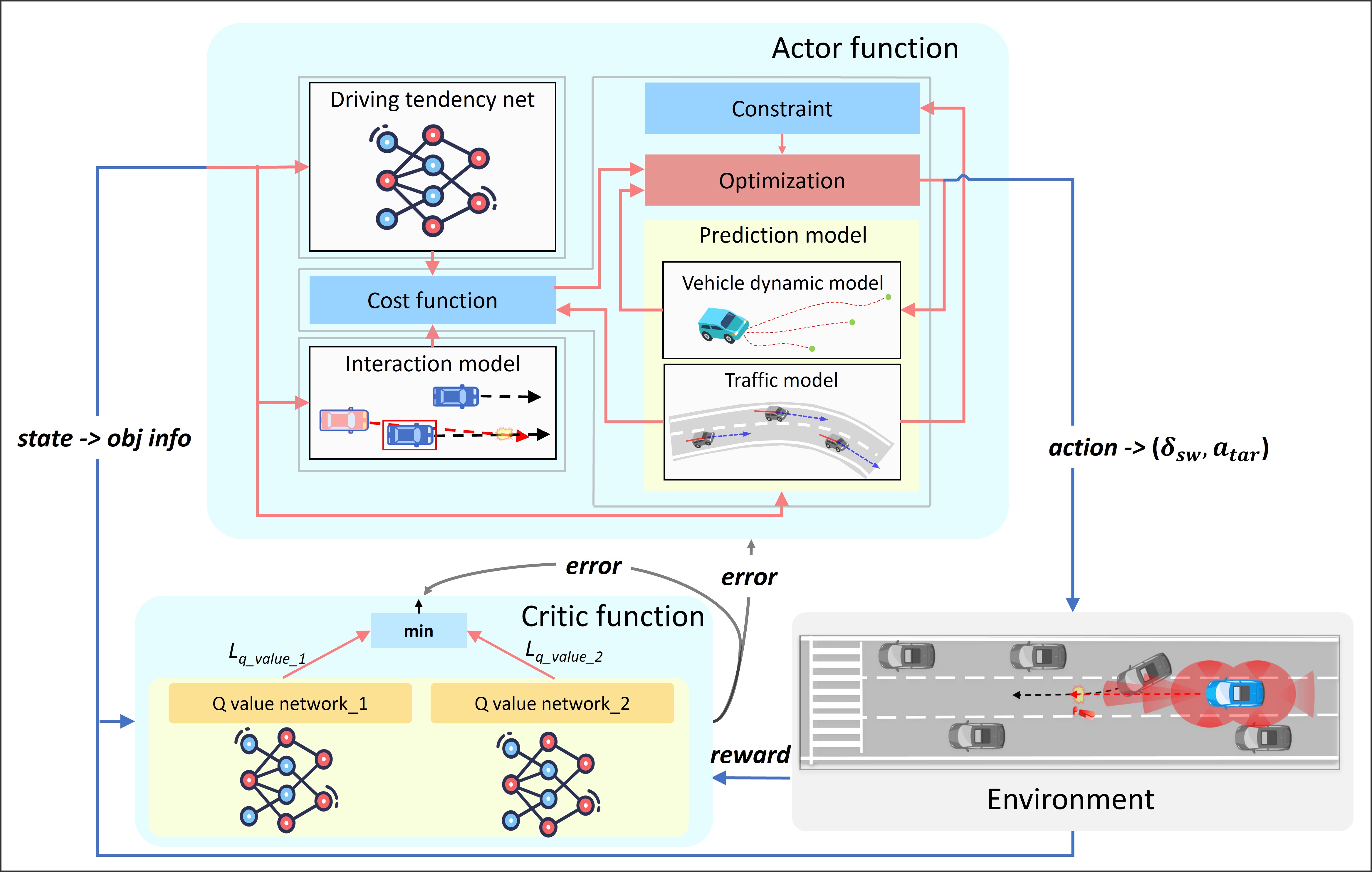
Autonomous vehicles with a self-evolving ability are expected to cope with unknown scenarios in the real-world environment. Take advantage of trial and error mechanism, reinforcement learning is able to self evolve by learning the optimal policy, and it is particularly well suitable for solving decision-making problems. However, reinforcement learning suffers from safety issues and low learning efficiency, especially in the continuous action space. Therefore, the motivation of this paper is to address the above problem by proposing a hybrid Mechanism-Experience-Learning augmented approach. Specifically, to realize the efficient self-evolution, the driving tendency by analogy with human driving experience is proposed to reduce the search space of the autonomous driving problem, while the constrained optimization problem based on a mechanistic model is designed to ensure safety during the self-evolving process. Experimental results show that the proposed method is capable of generating safe and reasonable actions in various complex scenarios, improving the performance of the autonomous driving system. Compared to conventional reinforcement learning, the safety and efficiency of the proposed algorithm are greatly improved. The training process is collision-free, and the training time is equivalent to less than 10 minutes in the real world.
Read more8/23/2024
0
A Safety-Oriented Self-Learning Algorithm for Autonomous Driving: Evolution Starting from a Basic Model
Shuo Yang, Caojun Wang, Zhenyu Ma, Yanjun Huang, Hong Chen
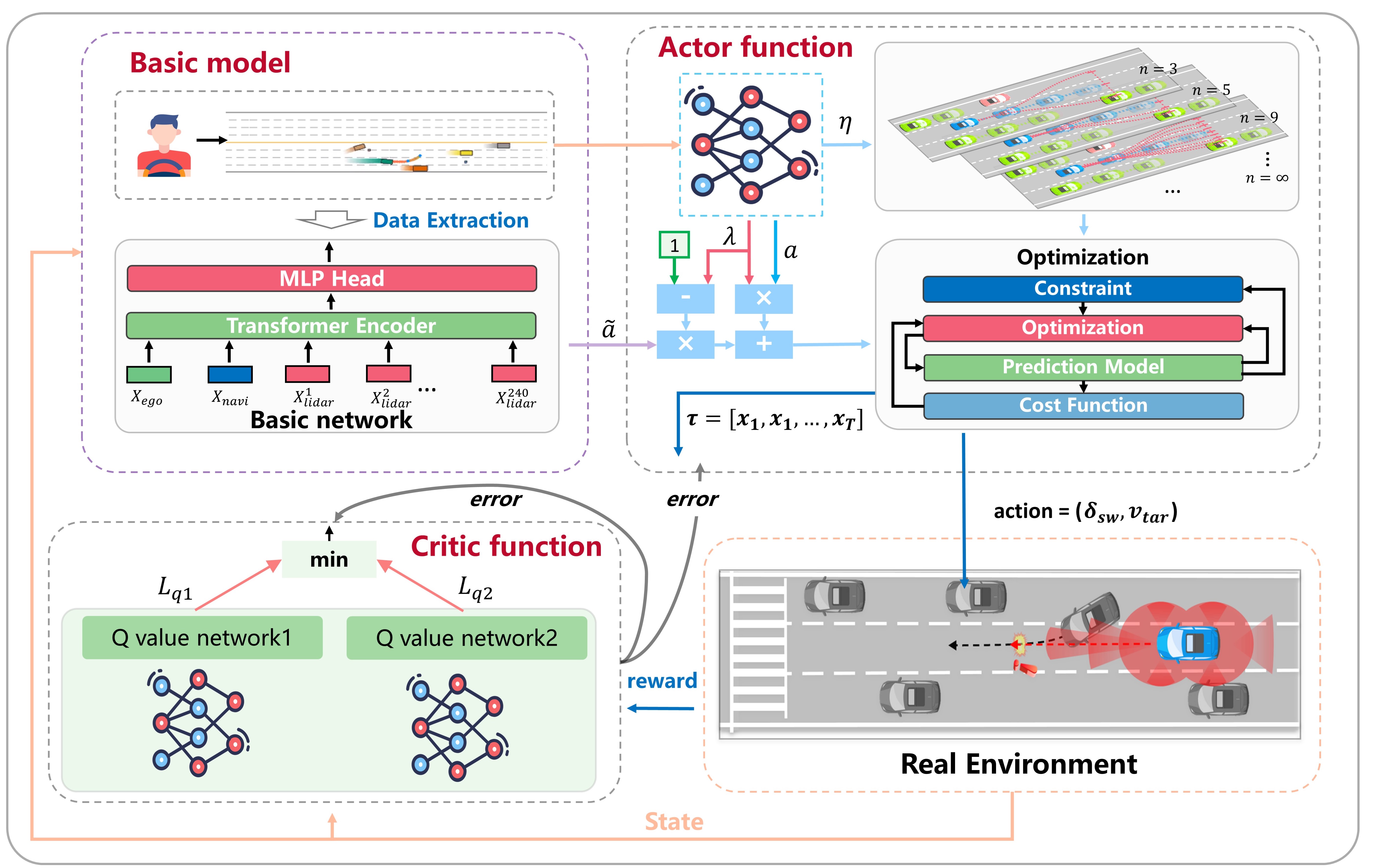
Autonomous driving vehicles with self-learning capabilities are expected to evolve in complex environments to improve their ability to cope with different scenarios. However, most self-learning algorithms suffer from low learning efficiency and lacking safety, which limits their applications. This paper proposes a safety-oriented self-learning algorithm for autonomous driving, which focuses on how to achieve evolution from a basic model. Specifically, a basic model based on the transformer encoder is designed to extract and output policy features from a small number of demonstration trajectories. To improve the learning efficiency, a policy mixed approach is developed. The basic model provides initial values to improve exploration efficiency, and the self-learning algorithm enhances the adaptability and generalization of the model, enabling continuous improvement without external intervention. Finally, an actor approximator based on receding horizon optimization is designed considering the constraints of the environmental input to ensure safety. The proposed method is verified in a challenging mixed traffic environment with pedestrians and vehicles. Simulation and real-vehicle test results show that the proposed method can safely and efficiently learn appropriate autonomous driving behaviors. Compared reinforcement learning and behavior cloning methods, it can achieve comprehensive improvement in learning efficiency and performance under the premise of ensuring safety.
Read more8/23/2024

0
A Safe Self-evolution Algorithm for Autonomous Driving Based on Data-Driven Risk Quantification Model
Shuo Yang, Shizhen Li, Yanjun Huang, Hong Chen
Autonomous driving systems with self-evolution capabilities have the potential to independently evolve in complex and open environments, allowing to handle more unknown scenarios. However, as a result of the safety-performance trade-off mechanism of evolutionary algorithms, it is difficult to ensure safe exploration without sacrificing the improvement ability. This problem is especially prominent in dynamic traffic scenarios. Therefore, this paper proposes a safe self-evolution algorithm for autonomous driving based on data-driven risk quantification model. Specifically, a risk quantification model based on the attention mechanism is proposed by modeling the way humans perceive risks during driving, with the idea of achieving safety situation estimation of the surrounding environment through a data-driven approach. To prevent the impact of over-conservative safety guarding policies on the self-evolution capability of the algorithm, a safety-evolutionary decision-control integration algorithm with adjustable safety limits is proposed, and the proposed risk quantization model is integrated into it. Simulation and real-vehicle experiments results illustrate the effectiveness of the proposed method. The results show that the proposed algorithm can generate safe and reasonable actions in a variety of complex scenarios and guarantee safety without losing the evolutionary potential of learning-based autonomous driving systems.
Read more8/26/2024
🔍
0
Autonomous Algorithm for Training Autonomous Vehicles with Minimal Human Intervention
Sang-Hyun Lee, Daehyeok Kwon, Seung-Woo Seo
Reinforcement learning (RL) provides a compelling framework for enabling autonomous vehicles to continue to learn and improve diverse driving behaviors on their own. However, training real-world autonomous vehicles with current RL algorithms presents several challenges. One critical challenge, often overlooked in these algorithms, is the need to reset a driving environment between every episode. While resetting an environment after each episode is trivial in simulated settings, it demands significant human intervention in the real world. In this paper, we introduce a novel autonomous algorithm that allows off-the-shelf RL algorithms to train an autonomous vehicle with minimal human intervention. Our algorithm takes into account the learning progress of the autonomous vehicle to determine when to abort episodes before it enters unsafe states and where to reset it for subsequent episodes in order to gather informative transitions. The learning progress is estimated based on the novelty of both current and future states. We also take advantage of rule-based autonomous driving algorithms to safely reset an autonomous vehicle to an initial state. We evaluate our algorithm against baselines on diverse urban driving tasks. The experimental results show that our algorithm is task-agnostic and achieves better driving performance with fewer manual resets than baselines.
Read more5/24/2024