A Safe Self-evolution Algorithm for Autonomous Driving Based on Data-Driven Risk Quantification Model

0

Sign in to get full access
Overview
- Proposes a safe self-evolution algorithm for autonomous driving systems
- Relies on a data-driven risk quantification model to ensure safety during the learning process
- Aims to enable autonomous vehicles to continuously improve their performance while maintaining high safety standards
Plain English Explanation
The paper presents a new algorithm for autonomous driving systems that allows them to safely self-evolve and improve their performance over time. The key idea is to use a data-driven risk quantification model to assess the safety of potential changes or updates to the system's decision-making.
Rather than blindly updating the autonomous driving system, the algorithm carefully evaluates the risks associated with any proposed changes. It does this by analyzing historical data on similar situations and the outcomes of past actions. This allows the system to identify changes that are likely to improve performance without compromising safety.
By continuously evaluating risks and adapting accordingly, the autonomous driving system can gradually learn and optimize its behavior in a safe and controlled manner. This is crucial for enabling autonomous vehicles to operate reliably and adapt to changing conditions on the road.
Technical Explanation
The paper proposes a "safe self-evolution algorithm" for autonomous driving systems. The core components of the approach include:
-
Risk Quantification Model: The system uses historical driving data to build a data-driven model that can quantify the risk associated with different driving actions and scenarios. This allows the system to evaluate the safety implications of potential changes or updates.
-
Evolutionary Algorithm: An evolutionary algorithm is used to iteratively optimize the autonomous driving system's decision-making policies. However, the algorithm is constrained by the risk quantification model to ensure that only safe changes are implemented.
-
Safety Evaluation: Before deploying any changes, the system thoroughly evaluates the safety implications using the risk quantification model. Changes that are deemed too risky are rejected, while those that improve performance without compromising safety are accepted.
By combining these elements, the researchers demonstrate how autonomous driving systems can continuously self-evolve in a safe and principled manner, gradually improving their capabilities over time.
Critical Analysis
The paper presents a promising approach for enabling safe self-evolution in autonomous driving systems. The use of a data-driven risk quantification model is a key strength, as it allows the system to make informed decisions about the safety implications of potential changes.
However, the paper does not address some important limitations and potential issues:
- The quality and representativeness of the historical driving data used to build the risk model are crucial, but this is not discussed in depth.
- The paper does not consider how the system would handle rare or unfamiliar scenarios that are not well-represented in the training data.
- The evolutionary algorithm may converge to local optima, leading to suboptimal performance. The paper does not explore techniques to mitigate this issue.
- The computational complexity and real-time performance requirements of the proposed approach are not evaluated, which could be a concern for practical deployment.
Readers should carefully consider these potential limitations and think critically about how they might affect the real-world applicability and scalability of the proposed approach.
Conclusion
This paper presents a novel algorithm for enabling autonomous driving systems to safely self-evolve and improve their performance over time. By using a data-driven risk quantification model to guide the evolutionary process, the system can continuously adapt while maintaining a high level of safety.
The proposed approach represents an important step towards safe and reliable autonomous driving systems that can adapt to changing conditions and user preferences. However, further research is needed to address the potential limitations and ensure the scalability and robustness of the algorithm in real-world deployment scenarios.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Safe Self-evolution Algorithm for Autonomous Driving Based on Data-Driven Risk Quantification Model
Shuo Yang, Shizhen Li, Yanjun Huang, Hong Chen
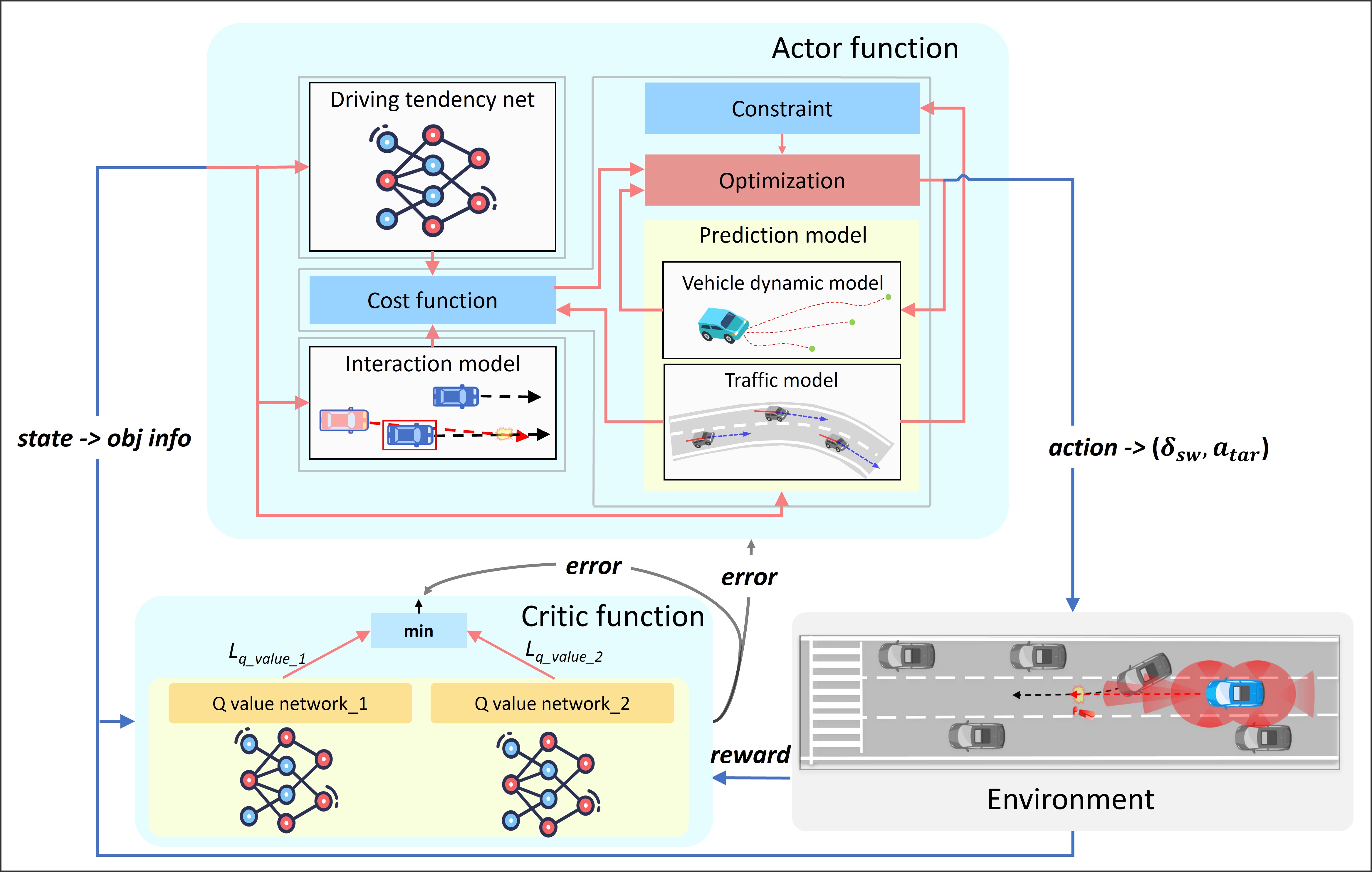
Autonomous driving systems with self-evolution capabilities have the potential to independently evolve in complex and open environments, allowing to handle more unknown scenarios. However, as a result of the safety-performance trade-off mechanism of evolutionary algorithms, it is difficult to ensure safe exploration without sacrificing the improvement ability. This problem is especially prominent in dynamic traffic scenarios. Therefore, this paper proposes a safe self-evolution algorithm for autonomous driving based on data-driven risk quantification model. Specifically, a risk quantification model based on the attention mechanism is proposed by modeling the way humans perceive risks during driving, with the idea of achieving safety situation estimation of the surrounding environment through a data-driven approach. To prevent the impact of over-conservative safety guarding policies on the self-evolution capability of the algorithm, a safety-evolutionary decision-control integration algorithm with adjustable safety limits is proposed, and the proposed risk quantization model is integrated into it. Simulation and real-vehicle experiments results illustrate the effectiveness of the proposed method. The results show that the proposed algorithm can generate safe and reasonable actions in a variety of complex scenarios and guarantee safety without losing the evolutionary potential of learning-based autonomous driving systems.
Read more8/26/2024
0
A Safe and Efficient Self-evolving Algorithm for Decision-making and Control of Autonomous Driving Systems
Shuo Yang, Liwen Wang, Yanjun Huang, Hong Chen
Autonomous vehicles with a self-evolving ability are expected to cope with unknown scenarios in the real-world environment. Take advantage of trial and error mechanism, reinforcement learning is able to self evolve by learning the optimal policy, and it is particularly well suitable for solving decision-making problems. However, reinforcement learning suffers from safety issues and low learning efficiency, especially in the continuous action space. Therefore, the motivation of this paper is to address the above problem by proposing a hybrid Mechanism-Experience-Learning augmented approach. Specifically, to realize the efficient self-evolution, the driving tendency by analogy with human driving experience is proposed to reduce the search space of the autonomous driving problem, while the constrained optimization problem based on a mechanistic model is designed to ensure safety during the self-evolving process. Experimental results show that the proposed method is capable of generating safe and reasonable actions in various complex scenarios, improving the performance of the autonomous driving system. Compared to conventional reinforcement learning, the safety and efficiency of the proposed algorithm are greatly improved. The training process is collision-free, and the training time is equivalent to less than 10 minutes in the real world.
Read more8/23/2024
0
A Safety-Oriented Self-Learning Algorithm for Autonomous Driving: Evolution Starting from a Basic Model
Shuo Yang, Caojun Wang, Zhenyu Ma, Yanjun Huang, Hong Chen
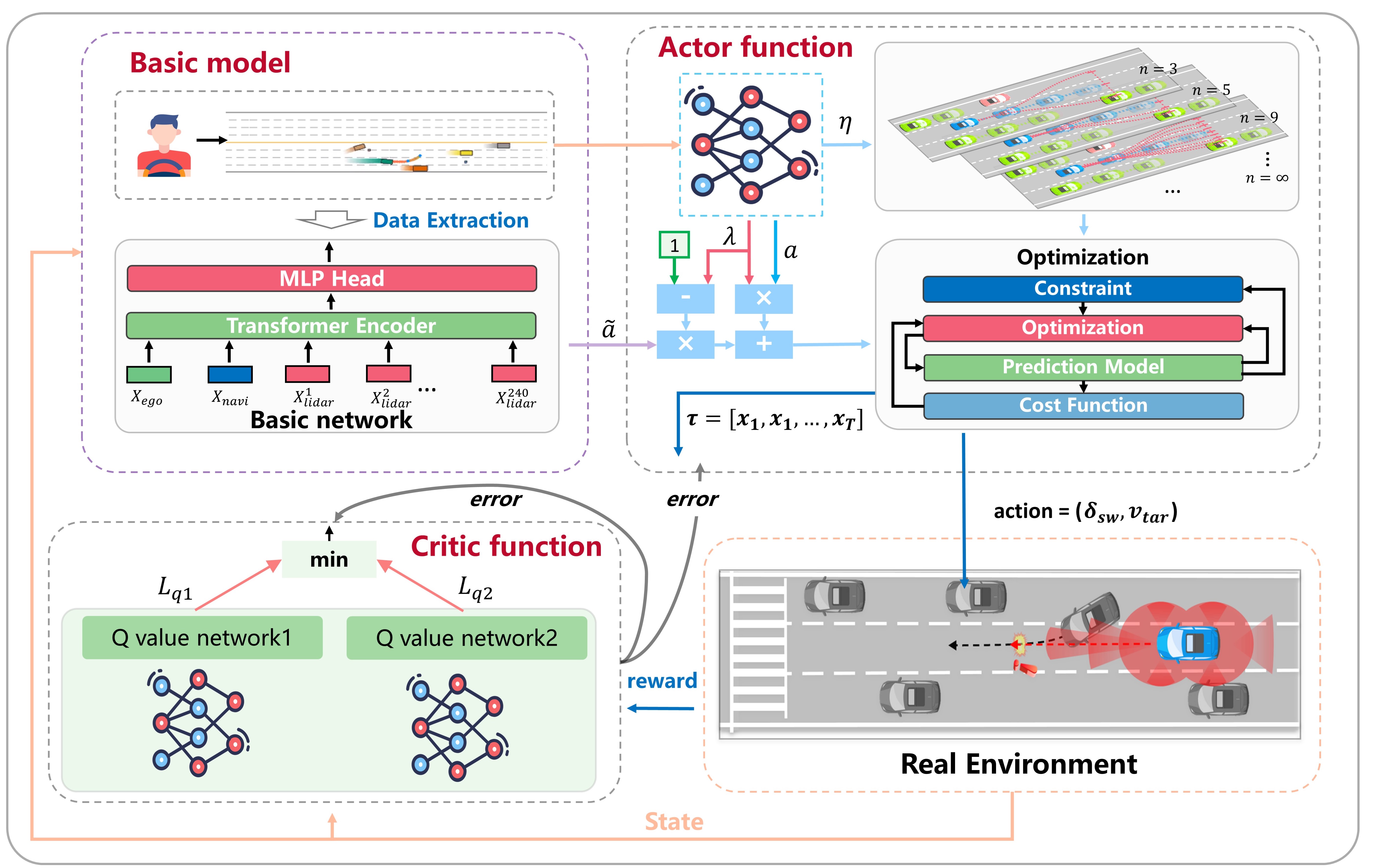
Autonomous driving vehicles with self-learning capabilities are expected to evolve in complex environments to improve their ability to cope with different scenarios. However, most self-learning algorithms suffer from low learning efficiency and lacking safety, which limits their applications. This paper proposes a safety-oriented self-learning algorithm for autonomous driving, which focuses on how to achieve evolution from a basic model. Specifically, a basic model based on the transformer encoder is designed to extract and output policy features from a small number of demonstration trajectories. To improve the learning efficiency, a policy mixed approach is developed. The basic model provides initial values to improve exploration efficiency, and the self-learning algorithm enhances the adaptability and generalization of the model, enabling continuous improvement without external intervention. Finally, an actor approximator based on receding horizon optimization is designed considering the constraints of the environmental input to ensure safety. The proposed method is verified in a challenging mixed traffic environment with pedestrians and vehicles. Simulation and real-vehicle test results show that the proposed method can safely and efficiently learn appropriate autonomous driving behaviors. Compared reinforcement learning and behavior cloning methods, it can achieve comprehensive improvement in learning efficiency and performance under the premise of ensuring safety.
Read more8/23/2024
✅
0
Safe by Design Autonomous Driving Systems
Marius Bozga, Joseph Sifakis
Developing safe autonomous driving systems is a major scientific and technical challenge. Existing AI-based end-to-end solutions do not offer the necessary safety guarantees, while traditional systems engineering approaches are defeated by the complexity of the problem. Currently, there is an increasing interest in hybrid design solutions, integrating machine learning components, when necessary, while using model-based components for goal management and planning. We study a method for building safe by design autonomous driving systems, based on the assumption that the capability to drive boils down to the coordinated execution of a given set of driving operations. The assumption is substantiated by a compositionality result considering that autopilots are dynamic systems receiving a small number of types of vistas as input, each vista defining a free space in its neighborhood. It is shown that safe driving for each type of vista in the corresponding free space, implies safe driving for any possible scenario under some easy-to-check conditions concerning the transition between vistas. The designed autopilot comprises distinct control policies one per type of vista, articulated in two consecutive phases. The first phase consists of carefully managing a potentially risky situation by virtually reducing speed, while the second phase consists of exiting the situation by accelerating. The autopilots designed use for their predictions simple functions characterizing the acceleration and deceleration capabilities of the vehicles. They cover the main driving operations, including entering a main road, overtaking, crossing intersections protected by traffic lights or signals, and driving on freeways. The results presented reinforce the case for hybrid solutions that incorporate mathematically elegant and robust decision methods that are safe by design.
Read more5/21/2024