Scenario Convex Programs for Dexterous Manipulation under Modeling Uncertainties

0

Sign in to get full access
Overview
- This paper proposes a scenario-based convex optimization approach for dexterous manipulation under modeling uncertainties.
- The authors develop a control framework that can handle various sources of uncertainty, including object properties, contact dynamics, and robot model parameters.
- The approach uses a scenario-based formulation to optimize robot trajectories and contact forces, ensuring robust performance even in the presence of uncertainties.
- Experiments on a dexterous robotic hand demonstrate the effectiveness of the proposed method in completing manipulation tasks with high success rates.
Plain English Explanation
The paper focuses on the problem of dexterous manipulation - the ability of a robot, often a robotic hand, to precisely control and manipulate objects. This is a challenging task because there are many sources of uncertainty involved, such as the properties of the object being handled, the dynamics of the contacts between the robot and the object, and even the robot's own model parameters.
To address this, the researchers developed a new control approach that uses scenario-based convex optimization. The key idea is to formulate the optimization problem in a way that explicitly accounts for these different sources of uncertainty. This allows the robot to plan trajectories and control forces that are robust to the uncertainties, ensuring reliable performance even when the real-world conditions differ from the model.
The authors demonstrate the effectiveness of their approach through experiments with a dexterous robotic hand. They show that the robot is able to successfully complete manipulation tasks, such as grasping and manipulating objects, even when there are significant uncertainties in the system. This represents an important step towards more capable and adaptable robotic manipulation systems.
Technical Explanation
The paper presents a scenario-based convex optimization approach for dexterous manipulation under modeling uncertainties. The key idea is to formulate the optimization problem in a way that explicitly accounts for various sources of uncertainty, including object properties, contact dynamics, and robot model parameters.
Specifically, the authors model the uncertainties as bounded sets and use a scenario-based approach to optimize the robot's trajectories and contact forces. This involves generating multiple "scenarios" or realizations of the uncertain parameters and optimizing the robot's actions to perform well across all of these scenarios. The resulting optimization problem is a convex program that can be efficiently solved.
The authors develop the mathematical formulation of the scenario-based convex program and prove that it can provide robust performance guarantees under the specified uncertainty sets. They also propose an efficient algorithm for solving the optimization problem in real-time.
The proposed approach is evaluated through extensive experiments on a dexterous robotic hand performing various manipulation tasks, such as grasping, repositioning, and in-hand manipulation. The results demonstrate that the scenario-based control framework can achieve high success rates in completing these tasks, even in the presence of significant modeling uncertainties.
Critical Analysis
The key strength of this research is the systematic way it addresses the challenge of dexterous manipulation under uncertainty. By formulating the problem as a scenario-based convex optimization, the authors are able to provide strong theoretical guarantees on the robustness of the resulting control policies.
One potential limitation is that the approach relies on having accurate bounds on the uncertainty sets. In practice, it may be difficult to precisely characterize all sources of uncertainty, and the performance of the method could degrade if the actual uncertainties exceed the assumed bounds.
Additionally, the computational complexity of solving the scenario-based optimization problem may limit the scalability of the approach, especially for high-dimensional manipulation tasks or systems with many uncertain parameters. Further research on efficient optimization algorithms or approximation methods could help address this challenge.
It would also be interesting to see how the proposed framework compares to other approaches for robust and adaptive control of dexterous manipulation, such as learning-based methods or techniques that explicitly model the uncertainty dynamics.
Overall, this paper represents an important contribution to the field of dexterous robotic manipulation, demonstrating the potential of scenario-based optimization to handle the various sources of uncertainty that arise in real-world manipulation tasks.
Conclusion
This paper presents a scenario-based convex optimization approach for dexterous manipulation under modeling uncertainties. By explicitly accounting for uncertainties in object properties, contact dynamics, and robot parameters, the proposed control framework can generate trajectories and contact forces that are robust to these variations, leading to high success rates in manipulation tasks.
The key innovation is the formulation of the problem as a scenario-based convex program, which allows for efficient optimization and provides theoretical guarantees on the robustness of the resulting policies. Experimental results on a dexterous robotic hand validate the effectiveness of the approach, suggesting that it could be a valuable tool for developing more capable and adaptable robotic manipulation systems.
While the method has some limitations in terms of computational complexity and the need for accurate uncertainty characterization, this research represents an important step towards addressing the challenges of dexterous manipulation in the face of real-world uncertainties.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Scenario Convex Programs for Dexterous Manipulation under Modeling Uncertainties
Berk Altiner, Adnane Saoud, Alex Caldas, Maria Makarov
This paper proposes a new framework to design a controller for the dexterous manipulation of an object by a multi-fingered hand. To achieve a robust manipulation and wide range of operations, the uncertainties on the location of the contact point and multiple operating points are taken into account in the control design by sampling the state space. The proposed control strategy is based on a robust pole placement using LMIs. Moreover, to handle uncertainties and different operating points, we recast our problem as a robust convex program (RCP). We then consider the original RCP as a scenario convex program (SCP) and solve the SCP by sampling the uncertain grasp map parameter and operating points in the state space. For a required probabilistic level of confidence, we quantify the feasibility of the SCP solution based on the number of sampling points. The control strategy is tested in simulation in a case study with contact location error and different initial grasps.
Read more7/17/2024
0
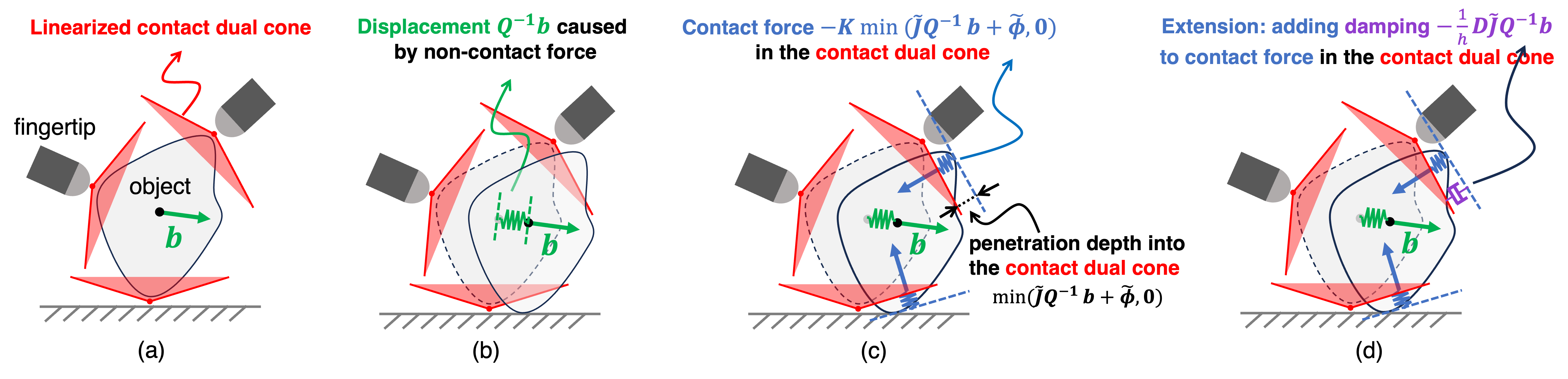
Complementarity-Free Multi-Contact Modeling and Optimization for Dexterous Manipulation
Wanxin Jin
A significant barrier preventing model-based methods from matching the high performance of reinforcement learning in dexterous manipulation is the inherent complexity of multi-contact dynamics. Traditionally formulated using complementarity models, multi-contact dynamics introduces combinatorial complexity and non-smoothness, complicating contact-rich planning and control. In this paper, we circumvent these challenges by introducing a novel, simplified multi-contact model. Our new model, derived from the duality of optimization-based contact models, dispenses with the complementarity constructs entirely, providing computational advantages such as explicit time stepping, differentiability, automatic satisfaction of Coulomb friction law, and minimal hyperparameter tuning. We demonstrate the effectiveness and efficiency of the model for planning and control in a range of challenging dexterous manipulation tasks, including fingertip 3D in-air manipulation, TriFinger in-hand manipulation, and Allegro hand on-palm reorientation, all with diverse objects. Our method consistently achieves state-of-the-art results: (I) a 96.5% average success rate across tasks, (II) high manipulation accuracy with an average reorientation error of 11{deg} and position error of 7.8 mm, and (III) model predictive control running at 50-100 Hz for all tested dexterous manipulation tasks. These results are achieved with minimal hyperparameter tuning.
Read more8/20/2024

0
Adaptive Robust Controller for handling Unknown Uncertainty of Robotic Manipulators
Mohamed Abdelwahab, Giulio Giacomuzzo, Alberto Dalla Libera, Ruggero Carli
The ability to achieve precise and smooth trajectory tracking is crucial for ensuring the successful execution of various tasks involving robotic manipulators. State-of-the-art techniques require accurate mathematical models of the robot dynamics, and robustness to model uncertainties is achieved by relying on precise bounds on the model mismatch. In this paper, we propose a novel adaptive robust feedback linearization scheme able to compensate for model uncertainties without any a-priori knowledge on them, and we provide a theoretical proof of convergence under mild assumptions. We evaluate the method on a simulated RR robot. First, we consider a nominal model with known model mismatch, which allows us to compare our strategy with state-of-the-art uncertainty-aware methods. Second, we implement the proposed control law in combination with a learned model, for which uncertainty bounds are not available. Results show that our method leads to performance comparable to uncertainty-aware methods while requiring less prior knowledge.
Read more6/21/2024
❗
0
Multi-contact Stochastic Predictive Control for Legged Robots with Contact Locations Uncertainty
Ahmad Gazar, Majid Khadiv, Andrea Del Prete, Ludovic Righetti
Trajectory optimization under uncertainties is a challenging problem for robots in contact with the environment. Such uncertainties are inevitable due to estimation errors, control imperfections, and model mismatches between planning models used for control and the real robot dynamics. This induces control policies that could violate the contact location constraints by making contact at unintended locations, and as a consequence leading to unsafe motion plans. This work addresses the problem of robust kino-dynamic whole-body trajectory optimization using stochastic nonlinear model predictive control (SNMPC) by considering additive uncertainties on the model dynamics subject to contact location chance-constraints as a function of robot's full kinematics. We demonstrate the benefit of using SNMPC over classic nonlinear MPC (NMPC) for whole-body trajectory optimization in terms of contact location constraint satisfaction (safety). We run extensive Monte-Carlo simulations for a quadruped robot performing agile trotting and bounding motions over small stepping stones, where contact location satisfaction becomes critical. Our results show that SNMPC is able to perform all motions safely with 100% success rate, while NMPC failed 48.3% of all motions.
Read more6/14/2024