Search-based versus Sampling-based Robot Motion Planning: A Comparative Study
2406.09623
0
0

Abstract
Robot motion planning is a challenging domain as it involves dealing with high-dimensional and continuous search space. In past decades, a wide variety of planning algorithms have been developed to tackle this problem, sometimes in isolation without comparing to each other. In this study, we benchmark two such prominent types of algorithms: OMPL's sampling-based RRT-Connect and SMPL's search-based ARA* with motion primitives. To compare these two fundamentally different approaches fairly, we adapt them to ensure the same planning conditions and benchmark them on the same set of planning scenarios. Our findings suggest that sampling-based planners like RRT-Connect show more consistent performance across the board in high-dimensional spaces, whereas search-based planners like ARA* have the capacity to perform significantly better when used with a suitable action-space sampling scheme. Through this study, we hope to showcase the effort required to properly benchmark motion planners from different paradigms thereby contributing to a more nuanced understanding of their capabilities and limitations. The code is available at https://github.com/gsotirchos/benchmarking_planners
Create account to get full access
Overview
- This paper presents a comparative study of search-based and sampling-based robot motion planning approaches.
- The researchers evaluate the performance and capabilities of these two major classes of motion planning algorithms.
- The study explores the tradeoffs, strengths, and limitations of each approach across various robot models and environments.
Plain English Explanation
Robot motion planning is the process of determining how a robot can move from one location to another while avoiding obstacles and constraints. This is a crucial capability for robots to navigate and accomplish tasks in the real world.
The paper compares two main approaches to robot motion planning: search-based methods and sampling-based methods. Search-based methods systematically explore the robot's configuration space to find an optimal path, while sampling-based methods randomly sample the space and connect the samples to find a feasible path.
The researchers evaluated the performance of these techniques across different robot models, including simple robotic arms and more complex whole-body robots. They analyzed factors such as the planning time, success rate, and quality of the resulting paths.
The findings provide insights into the tradeoffs between the two approaches. Search-based methods tend to be more computationally intensive but can guarantee optimal solutions, while sampling-based methods are generally faster but may not find the best path. The choice of which approach to use depends on the specific requirements of the robot and the task at hand.
Technical Explanation
The paper compares the performance of search-based and sampling-based motion planning algorithms for a variety of robot models and environments. Search-based methods, such as A* and Dijkstra's algorithm, systematically explore the robot's configuration space to find an optimal path. Sampling-based methods, like Rapidly-exploring Random Trees (RRT) and Probabilistic Roadmaps (PRM), randomly sample the space and connect the samples to find a feasible path.
The researchers evaluated the planning time, success rate, and path quality of these two approaches across different robot models, including a 2D mobile robot, a 6-DOF robotic arm, and a 7-DOF whole-body humanoid robot. The experiments were conducted in both simple and complex environments, with varying obstacle densities and configurations.
The results showed that search-based methods generally outperformed sampling-based methods in terms of path quality, as they are able to find the globally optimal solution. However, search-based approaches tended to have higher computational requirements, especially for high-dimensional robots. Sampling-based methods, on the other hand, were able to find feasible solutions more quickly, but the quality of the paths was not as consistent.
The paper also discusses the strengths and limitations of each approach. Search-based methods are well-suited for problems with known, static environments and relatively low-dimensional robots. Sampling-based methods excel in high-dimensional spaces and dynamic environments, but may struggle to find optimal solutions. The authors suggest that a hybrid approach, combining elements of both search-based and sampling-based planning, could be a promising direction for future research.
Critical Analysis
The paper provides a thorough and well-designed comparative study of search-based and sampling-based motion planning algorithms. The researchers have carefully selected a diverse set of robot models and environments to evaluate the performance of the two approaches. The results offer valuable insights into the tradeoffs between the two classes of algorithms, which can inform the choice of motion planning strategy for different robotic applications.
One potential limitation of the study is that it focuses solely on kinematic motion planning, without considering dynamic constraints or uncertainties in the robot's environment. In real-world scenarios, robots often operate under dynamic conditions, and accounting for these factors could impact the performance and applicability of the planning algorithms. Further research could explore the performance of these algorithms in more realistic, dynamic environments.
Additionally, the paper does not delve into the computational complexity and scalability of the algorithms as the problem size or dimensionality increases. Understanding the scaling behavior of these methods would be important for their deployment in large-scale, complex robotic systems.
Overall, the paper presents a robust and insightful comparison of search-based and sampling-based motion planning techniques, which can serve as a valuable reference for researchers and practitioners in the field of robotics.
Conclusion
This comparative study of search-based and sampling-based robot motion planning algorithms provides valuable insights into the strengths, limitations, and tradeoffs of these two major approaches. The researchers have evaluated the performance of these techniques across a range of robot models and environments, offering guidance on the appropriate choice of algorithm based on the specific requirements of the robotic system and task.
The findings suggest that search-based methods excel in terms of path quality and optimality, but can be computationally intensive, particularly for high-dimensional robots. Sampling-based methods, on the other hand, are generally faster and more efficient, but may not always find the globally optimal solution.
The insights from this research can inform the development of more robust and versatile robot motion planning systems, which are essential for enabling robots to navigate complex environments and accomplish a wide range of tasks. Future research directions could explore the integration of these approaches into hybrid planning frameworks, as well as the incorporation of dynamic constraints and uncertainty to better reflect real-world conditions.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Neural Randomized Planning for Whole Body Robot Motion
Yunfan Lu, Yuchen Ma, David Hsu, Caicai Pan
0
0
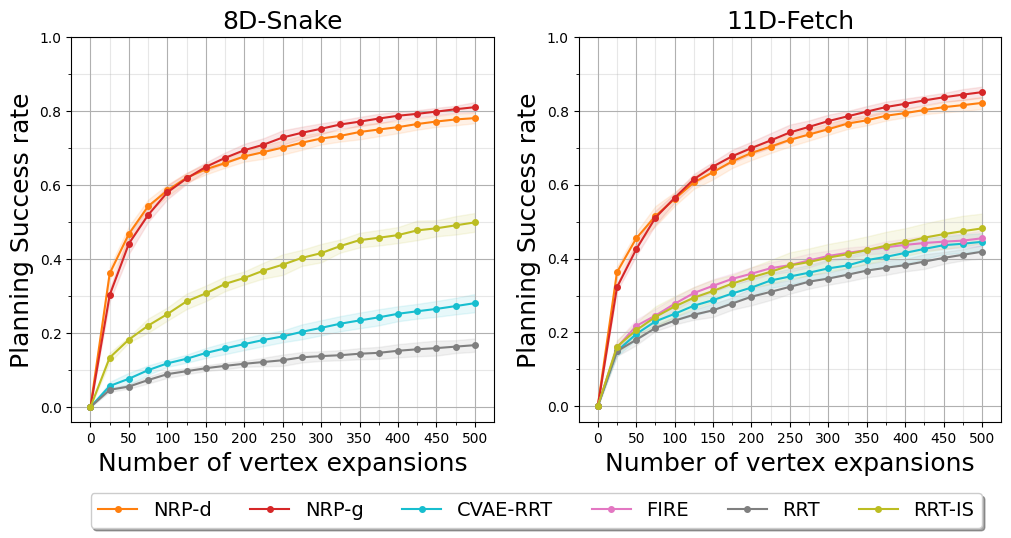
Robot motion planning has made vast advances over the past decades, but the challenge remains: robot mobile manipulators struggle to plan long-range whole-body motion in common household environments in real time, because of high-dimensional robot configuration space and complex environment geometry. To tackle the challenge, this paper proposes Neural Randomized Planner (NRP), which combines a global sampling-based motion planning (SBMP) algorithm and a local neural sampler. Intuitively, NRP uses the search structure inside the global planner to stitch together learned local sampling distributions to form a global sampling distribution adaptively. It benefits from both learning and planning. Locally, it tackles high dimensionality by learning to sample in promising regions from data, with a rich neural network representation. Globally, it composes the local sampling distributions through planning and exploits local geometric similarity to scale up to complex environments. Experiments both in simulation and on a real robot show NRP yields superior performance compared to some of the best classical and learning-enhanced SBMP algorithms. Further, despite being trained in simulation, NRP demonstrates zero-shot transfer to a real robot operating in novel household environments, without any fine-tuning or manual adaptation.
5/21/2024

Task and Motion Planning for Execution in the Real
Tianyang Pan, Rahul Shome, Lydia E. Kavraki
0
0
Task and motion planning represents a powerful set of hybrid planning methods that combine reasoning over discrete task domains and continuous motion generation. Traditional reasoning necessitates task domain models and enough information to ground actions to motion planning queries. Gaps in this knowledge often arise from sources like occlusion or imprecise modeling. This work generates task and motion plans that include actions cannot be fully grounded at planning time. During execution, such an action is handled by a provided human-designed or learned closed-loop behavior. Execution combines offline planned motions and online behaviors till reaching the task goal. Failures of behaviors are fed back as constraints to find new plans. Forty real-robot trials and motivating demonstrations are performed to evaluate the proposed framework and compare against state-of-the-art. Results show faster execution time, less number of actions, and more success in problems where diverse gaps arise. The experiment data is shared for researchers to simulate these settings. The work shows promise in expanding the applicable class of realistic partially grounded problems that robots can address.
6/14/2024

Greedy Heuristics for Sampling-based Motion Planning in High-Dimensional State Spaces
Phone Thiha Kyaw, Anh Vu Le, Lim Yi, Prabakaran Veerajagadheswar, Mohan Rajesh Elara, Dinh Tung Vo, Minh Bui Vu
0
0
Sampling-based motion planning algorithms are very effective at finding solutions in high-dimensional continuous state spaces as they do not require prior approximations of the problem domain compared to traditional discrete graph-based searches. The anytime version of the Rapidly-exploring Random Trees (RRT) algorithm, denoted as RRT*, often finds high-quality solutions by incrementally approximating and searching the problem domain through random sampling. However, due to its low sampling efficiency and slow convergence rate, research has proposed many variants of RRT*, incorporating different heuristics and sampling strategies to overcome the constraints in complex planning problems. Yet, these approaches address specific convergence aspects of RRT* limitations, leaving a need for a sampling-based algorithm that can quickly find better solutions in complex high-dimensional state spaces with a faster convergence rate for practical motion planning applications. This article unifies and leverages the greedy search and heuristic techniques used in various RRT* variants to develop a greedy version of the anytime Rapidly-exploring Random Trees algorithm, denoted as Greedy RRT* (G-RRT*). It improves the initial solution-finding time of RRT* by maintaining two trees rooted at both the start and goal ends, advancing toward each other using greedy connection heuristics. It also accelerates the convergence rate of RRT* by introducing a greedy version of direct informed sampling procedure, which guides the sampling towards the promising region of the problem domain based on heuristics. We validate our approach on simulated planning problems, manipulation problems on Barrett WAM Arms, and on a self-reconfigurable robot, Panthera. Results show that G-RRT* produces asymptotically optimal solution paths and outperforms state-of-the-art RRT* variants, especially in high-dimensional planning problems.
5/7/2024

A Framework for Guided Motion Planning
Amnon Attali, Stav Ashur, Isaac Burton Love, Courtney McBeth, James Motes, Marco Morales, Nancy M. Amato
0
0
Randomized sampling based algorithms are widely used in robot motion planning due to the problem's intractability, and are experimentally effective on a wide range of problem instances. Most variants bias their sampling using various heuristics related to the known underlying structure of the search space. In this work, we formalize the intuitive notion of guided search by defining the concept of a guiding space. This new language encapsulates many seemingly distinct prior methods under the same framework, and allows us to reason about guidance, a previously obscured core contribution of different algorithms. We suggest an information theoretic method to evaluate guidance, which experimentally matches intuition when tested on known algorithms in a variety of environments. The language and evaluation of guidance suggests improvements to existing methods, and allows for simple hybrid algorithms that combine guidance from multiple sources.
4/5/2024