See and Think: Embodied Agent in Virtual Environment

0

Sign in to get full access
Overview
- This paper presents an embodied agent system that can "see and think" in a virtual environment, demonstrating its ability to navigate and interact with the environment.
- The system combines computer vision, language processing, and decision-making components to enable the agent to perceive its surroundings, understand its goals, and take appropriate actions.
- The research explores ways to develop more capable and versatile embodied agents that can thrive in complex, dynamic virtual worlds.
Plain English Explanation
This paper describes a virtual agent that can navigate and interact with its environment using a combination of visual perception, language understanding, and decision-making. The agent is "embodied," meaning it has a simulated physical presence within the virtual world, rather than just being a disembodied software system.
The agent can "see" its surroundings by processing visual information, and it can "think" by understanding language-based instructions or goals and deciding how to best achieve them. For example, the agent might be able to read a text prompt telling it to find a specific object in the virtual environment, locate the object using its computer vision, and then navigate to the object's location.
This kind of embodied agent system has applications in areas like robotics, where virtual environments can be used to train and test autonomous systems before deploying them in the real world. It also relates to research on language-driven agents and world models that can use visual and language information to understand and interact with 3D environments.
The goal of this work is to develop more capable and versatile embodied agents that can thrive in complex, dynamic virtual worlds, which could have implications for the development of more advanced AI systems and interactive virtual experiences.
Technical Explanation
The paper describes an embodied agent system that combines computer vision, language processing, and decision-making components to enable the agent to perceive its surroundings, understand its goals, and take appropriate actions in a virtual environment.
The system uses a deep neural network-based perception module to process visual information from the agent's simulated camera, allowing it to detect and recognize objects, people, and other elements in the environment. This visual information is then combined with language input, such as text instructions or goals, using a language processing module.
The decision-making component of the system uses this multimodal (visual and language) information to determine the agent's actions, such as where to move, what to interact with, or how to accomplish a given task. The researchers experiment with different decision-making approaches, including reinforcement learning and planning-based methods, to optimize the agent's behavior.
The paper evaluates the system's performance on various tasks in a Minecraft-like virtual environment, assessing the agent's ability to navigate, find objects, and complete language-guided instructions. The results demonstrate the potential of this type of embodied agent system to thrive in complex, dynamic virtual worlds, which could have implications for the development of more advanced AI systems and interactive virtual experiences.
Critical Analysis
The paper presents a promising approach to developing embodied agents that can perceive, understand, and interact with virtual environments. However, the research is still at an early stage, and there are several limitations and areas for further exploration:
- The experiments are conducted in a relatively simple, Minecraft-like virtual environment. More complex and realistic virtual worlds would be needed to fully assess the system's capabilities and generalization.
- The language processing and decision-making components of the system are relatively basic, and more advanced techniques, such as those explored in the STEVE series, could be integrated to enhance the agent's reasoning and planning abilities.
- The paper does not provide a detailed analysis of the system's limitations or potential failure modes, which would be important for understanding the robustness and reliability of the approach.
- The proposed system is still primarily focused on perception and action, and it lacks the more comprehensive "world model" and reasoning capabilities that some recent research has explored.
Overall, the paper presents an interesting step towards more capable and versatile embodied agents, but further research and development will be needed to realize the full potential of this approach.
Conclusion
This paper describes an embodied agent system that can "see and think" in a virtual environment, demonstrating its ability to navigate and interact with the environment using a combination of computer vision, language processing, and decision-making components. The research explores ways to develop more capable and versatile embodied agents that can thrive in complex, dynamic virtual worlds, which could have implications for the development of more advanced AI systems and interactive virtual experiences.
While the presented system shows promise, there are still several limitations and areas for further exploration, such as the need for more complex virtual environments, more advanced language and reasoning capabilities, and a more comprehensive understanding of the system's robustness and reliability. Nonetheless, this work represents an important step forward in the field of embodied AI and virtual agent systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
See and Think: Embodied Agent in Virtual Environment
Zhonghan Zhao, Wenhao Chai, Xuan Wang, Li Boyi, Shengyu Hao, Shidong Cao, Tian Ye, Gaoang Wang
Large language models (LLMs) have achieved impressive pro-gress on several open-world tasks. Recently, using LLMs to build embodied agents has been a hotspot. This paper proposes STEVE, a comprehensive and visionary embodied agent in the Minecraft virtual environment. STEVE comprises three key components: vision perception, language instruction, and code action. Vision perception involves interpreting visual information in the environment, which is then integrated into the LLMs component with agent state and task instruction. Language instruction is responsible for iterative reasoning and decomposing complex tasks into manageable guidelines. Code action generates executable skill actions based on retrieval in skill database, enabling the agent to interact effectively within the Minecraft environment. We also collect STEVE-21K dataset, which includes 600+ vision-environment pairs, 20K knowledge question-answering pairs, and 200+ skill-code pairs. We conduct continuous block search, knowledge question and answering, and tech tree mastery to evaluate the performance. Extensive experiments show that STEVE achieves at most 1.5x faster unlocking key tech trees and 2.5x quicker in block search tasks.
Read more7/10/2024
🗣️
0
STEVE Series: Step-by-Step Construction of Agent Systems in Minecraft
Zhonghan Zhao, Wenhao Chai, Xuan Wang, Ke Ma, Kewei Chen, Dongxu Guo, Tian Ye, Yanting Zhang, Hongwei Wang, Gaoang Wang
Building an embodied agent system with a large language model (LLM) as its core is a promising direction. Due to the significant costs and uncontrollable factors associated with deploying and training such agents in the real world, we have decided to begin our exploration within the Minecraft environment. Our STEVE Series agents can complete basic tasks in a virtual environment and more challenging tasks such as navigation and even creative tasks, with an efficiency far exceeding previous state-of-the-art methods by a factor of $2.5times$ to $7.3times$. We begin our exploration with a vanilla large language model, augmenting it with a vision encoder and an action codebase trained on our collected high-quality dataset STEVE-21K. Subsequently, we enhanced it with a Critic and memory to transform it into a complex system. Finally, we constructed a hierarchical multi-agent system. Our recent work explored how to prune the agent system through knowledge distillation. In the future, we will explore more potential applications of STEVE agents in the real world.
Read more6/18/2024
0
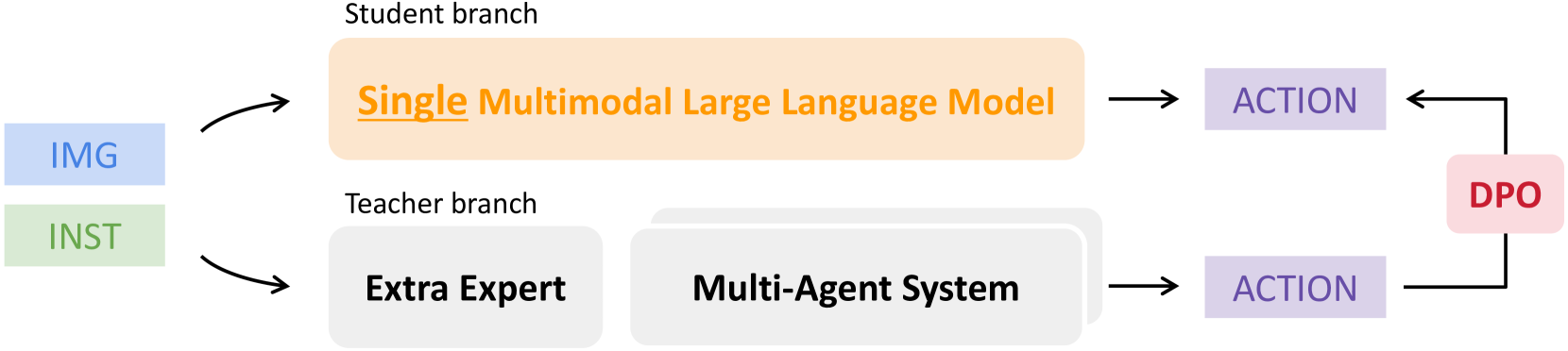
Do We Really Need a Complex Agent System? Distill Embodied Agent into a Single Model
Zhonghan Zhao, Ke Ma, Wenhao Chai, Xuan Wang, Kewei Chen, Dongxu Guo, Yanting Zhang, Hongwei Wang, Gaoang Wang
With the power of large language models (LLMs), open-ended embodied agents can flexibly understand human instructions, generate interpretable guidance strategies, and output executable actions. Nowadays, Multi-modal Language Models~(MLMs) integrate multi-modal signals into LLMs, further bringing richer perception to entity agents and allowing embodied agents to perceive world-understanding tasks more delicately. However, existing works: 1) operate independently by agents, each containing multiple LLMs, from perception to action, resulting in gaps between complex tasks and execution; 2) train MLMs on static data, struggling with dynamics in open-ended scenarios; 3) input prior knowledge directly as prompts, suppressing application flexibility. We propose STEVE-2, a hierarchical knowledge distillation framework for open-ended embodied tasks, characterized by 1) a hierarchical system for multi-granular task division, 2) a mirrored distillation method for parallel simulation data, and 3) an extra expert model for bringing additional knowledge into parallel simulation. After distillation, embodied agents can complete complex, open-ended tasks without additional expert guidance, utilizing the performance and knowledge of a versatile MLM. Extensive evaluations on navigation and creation tasks highlight the superior performance of STEVE-2 in open-ended tasks, with $1.4 times$ - $7.3 times$ in performance.
Read more4/9/2024
⛏️
0
An Embodied Generalist Agent in 3D World
Jiangyong Huang, Silong Yong, Xiaojian Ma, Xiongkun Linghu, Puhao Li, Yan Wang, Qing Li, Song-Chun Zhu, Baoxiong Jia, Siyuan Huang
Leveraging massive knowledge from large language models (LLMs), recent machine learning models show notable successes in general-purpose task solving in diverse domains such as computer vision and robotics. However, several significant challenges remain: (i) most of these models rely on 2D images yet exhibit a limited capacity for 3D input; (ii) these models rarely explore the tasks inherently defined in 3D world, e.g., 3D grounding, embodied reasoning and acting. We argue these limitations significantly hinder current models from performing real-world tasks and approaching general intelligence. To this end, we introduce LEO, an embodied multi-modal generalist agent that excels in perceiving, grounding, reasoning, planning, and acting in the 3D world. LEO is trained with a unified task interface, model architecture, and objective in two stages: (i) 3D vision-language (VL) alignment and (ii) 3D vision-language-action (VLA) instruction tuning. We collect large-scale datasets comprising diverse object-level and scene-level tasks, which require considerable understanding of and interaction with the 3D world. Moreover, we meticulously design an LLM-assisted pipeline to produce high-quality 3D VL data. Through extensive experiments, we demonstrate LEO's remarkable proficiency across a wide spectrum of tasks, including 3D captioning, question answering, embodied reasoning, navigation and manipulation. Our ablative studies and scaling analyses further provide valuable insights for developing future embodied generalist agents. Code and data are available on project page.
Read more5/10/2024