Settling Decentralized Multi-Agent Coordinated Exploration by Novelty Sharing

0
⚙️
Sign in to get full access
Overview
- Decentralized cooperative multi-agent reinforcement learning faces two key challenges:
- The novelty of global states is unavailable, while the novelty of local observations is biased.
- How can agents explore in a coordinated way?
- To address these challenges, the authors propose MACE, a simple yet effective multi-agent coordinated exploration method.
Plain English Explanation
MACE is a new approach to help multiple AI agents explore their environment in a more coordinated way. In typical multi-agent reinforcement learning, each agent only has access to its own local observations, which can be biased. Additionally, the agents don't have information about the overall or "global" state of the environment, which makes it hard for them to explore effectively as a team.
MACE solves this by having the agents communicate their local "novelty" - how much new information they are discovering. By sharing this local novelty, the agents can get a sense of the global novelty and coordinate their exploration. MACE also introduces a new way to measure how much one agent's actions influence the exploration of the other agents. This is used as an additional reward signal to encourage the agents to explore in a more coordinated way.
The key innovation of MACE is that it allows decentralized agents to approximate the global state of the environment and explore it more efficiently as a team, even when they only have access to local information. This leads to improved performance on multi-agent tasks with sparse rewards.
Technical Explanation
MACE addresses the two key challenges in decentralized cooperative multi-agent reinforcement learning:
-
Unavailability of global novelty: Since agents only have access to their local observations, the novelty of the overall global state is not available to them. MACE has agents communicate their local novelty to approximate the global novelty.
-
Biased local novelty: The novelty of local observations can be biased, as agents may focus on exploring their immediate surroundings rather than coordinating with the group. MACE introduces a new metric called "weighted mutual information" to measure how much one agent's actions influence the exploration of other agents. This is used as an intrinsic reward to encourage coordinated exploration.
The key components of MACE are:
-
Communication of local novelty: Agents share information about the novelty of their local observations, allowing them to estimate the global novelty.
-
Weighted mutual information: This metric quantifies the influence of one agent's actions on the exploration of other agents. It is used as an intrinsic reward to incentivize coordinated exploration.
-
Coordinated exploration: By communicating local novelty and using weighted mutual information as a reward signal, MACE enables agents to explore their environment in a more coordinated manner, leading to better performance on multi-agent tasks with sparse rewards.
Critical Analysis
The paper presents a novel and promising approach to addressing the challenges of decentralized cooperative multi-agent reinforcement learning. By introducing MACE, the authors demonstrate how agents can approximate global novelty and coordinate their exploration through local communication and a new intrinsic reward signal.
One potential limitation of the research is that it has only been evaluated on a limited set of environments. Further testing in more diverse and complex multi-agent scenarios would be valuable to assess the generalizability of MACE.
Additionally, the paper does not provide a deep analysis of the computational complexity or scalability of the MACE approach as the number of agents increases. This is an important consideration for real-world applications, where efficiency and scalability are crucial.
Conclusion
The MACE approach proposed in this paper represents a significant advancement in decentralized cooperative multi-agent reinforcement learning. By enabling agents to approximate global novelty and coordinate their exploration through local communication and intrinsic rewards, MACE addresses two key challenges in this field.
The potential impact of this research is promising, as it could lead to more effective and efficient exploration in a wide range of multi-agent systems, from robotics and autonomous vehicles to distributed decision-making in complex environments. Further research and validation in diverse scenarios will be important to fully understand the capabilities and limitations of the MACE approach.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
⚙️
0
Settling Decentralized Multi-Agent Coordinated Exploration by Novelty Sharing
Haobin Jiang, Ziluo Ding, Zongqing Lu
Exploration in decentralized cooperative multi-agent reinforcement learning faces two challenges. One is that the novelty of global states is unavailable, while the novelty of local observations is biased. The other is how agents can explore in a coordinated way. To address these challenges, we propose MACE, a simple yet effective multi-agent coordinated exploration method. By communicating only local novelty, agents can take into account other agents' local novelty to approximate the global novelty. Further, we newly introduce weighted mutual information to measure the influence of one agent's action on other agents' accumulated novelty. We convert it as an intrinsic reward in hindsight to encourage agents to exert more influence on other agents' exploration and boost coordinated exploration. Empirically, we show that MACE achieves superior performance in three multi-agent environments with sparse rewards.
Read more8/13/2024
0
MESA: Cooperative Meta-Exploration in Multi-Agent Learning through Exploiting State-Action Space Structure
Zhicheng Zhang, Yancheng Liang, Yi Wu, Fei Fang
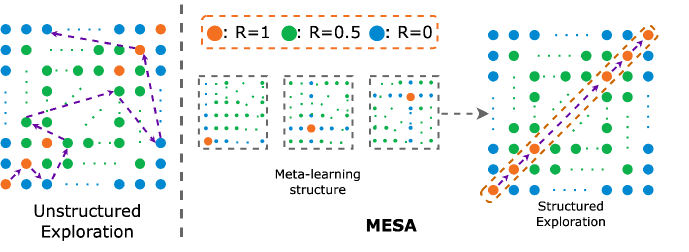
Multi-agent reinforcement learning (MARL) algorithms often struggle to find strategies close to Pareto optimal Nash Equilibrium, owing largely to the lack of efficient exploration. The problem is exacerbated in sparse-reward settings, caused by the larger variance exhibited in policy learning. This paper introduces MESA, a novel meta-exploration method for cooperative multi-agent learning. It learns to explore by first identifying the agents' high-rewarding joint state-action subspace from training tasks and then learning a set of diverse exploration policies to cover the subspace. These trained exploration policies can be integrated with any off-policy MARL algorithm for test-time tasks. We first showcase MESA's advantage in a multi-step matrix game. Furthermore, experiments show that with learned exploration policies, MESA achieves significantly better performance in sparse-reward tasks in several multi-agent particle environments and multi-agent MuJoCo environments, and exhibits the ability to generalize to more challenging tasks at test time.
Read more5/3/2024
🏅
0
Randomized Exploration in Cooperative Multi-Agent Reinforcement Learning
Hao-Lun Hsu, Weixin Wang, Miroslav Pajic, Pan Xu
We present the first study on provably efficient randomized exploration in cooperative multi-agent reinforcement learning (MARL). We propose a unified algorithm framework for randomized exploration in parallel Markov Decision Processes (MDPs), and two Thompson Sampling (TS)-type algorithms, CoopTS-PHE and CoopTS-LMC, incorporating the perturbed-history exploration (PHE) strategy and the Langevin Monte Carlo exploration (LMC) strategy respectively, which are flexible in design and easy to implement in practice. For a special class of parallel MDPs where the transition is (approximately) linear, we theoretically prove that both CoopTS-PHE and CoopTS-LMC achieve a $widetilde{mathcal{O}}(d^{3/2}H^2sqrt{MK})$ regret bound with communication complexity $widetilde{mathcal{O}}(dHM^2)$, where $d$ is the feature dimension, $H$ is the horizon length, $M$ is the number of agents, and $K$ is the number of episodes. This is the first theoretical result for randomized exploration in cooperative MARL. We evaluate our proposed method on multiple parallel RL environments, including a deep exploration problem (textit{i.e.,} $N$-chain), a video game, and a real-world problem in energy systems. Our experimental results support that our framework can achieve better performance, even under conditions of misspecified transition models. Additionally, we establish a connection between our unified framework and the practical application of federated learning.
Read more4/17/2024
🤯
0
Emergence of Collective Open-Ended Exploration from Decentralized Meta-Reinforcement Learning
Richard Bornemann, Gautier Hamon, Eleni Nisioti, Cl'ement Moulin-Frier
Recent works have proven that intricate cooperative behaviors can emerge in agents trained using meta reinforcement learning on open ended task distributions using self-play. While the results are impressive, we argue that self-play and other centralized training techniques do not accurately reflect how general collective exploration strategies emerge in the natural world: through decentralized training and over an open-ended distribution of tasks. In this work we therefore investigate the emergence of collective exploration strategies, where several agents meta-learn independent recurrent policies on an open ended distribution of tasks. To this end we introduce a novel environment with an open ended procedurally generated task space which dynamically combines multiple subtasks sampled from five diverse task types to form a vast distribution of task trees. We show that decentralized agents trained in our environment exhibit strong generalization abilities when confronted with novel objects at test time. Additionally, despite never being forced to cooperate during training the agents learn collective exploration strategies which allow them to solve novel tasks never encountered during training. We further find that the agents learned collective exploration strategies extend to an open ended task setting, allowing them to solve task trees of twice the depth compared to the ones seen during training. Our open source code as well as videos of the agents can be found on our companion website.
Read more5/8/2024