Shakebot: A Low-cost, Open-source Robotic Shake Table for Earthquake Research and Education

0
🧪
Sign in to get full access
Overview
- This paper presents the design and implementation of a low-cost, open-source shake table named Shakebot for earthquake engineering research and education.
- Shakebot is built using Robot Operating System (ROS) and principles of robotics, adapting affordable and high-accuracy components from 3D printers.
- The Shakebot is capable of reaching a maximum horizontal acceleration of 11.8 m/s^2 (1.2 g) and a velocity of 0.5 m/s with a 2 kg specimen.
- The Shakebot is equipped with an accelerometer and a high frame-rate camera for bed motion estimation, making it accessible to a wide range of users, including students, educators, and researchers.
Plain English Explanation
The paper describes the creation of a low-cost, open-source shake table called Shakebot that can be used for earthquake engineering research and education. The Shakebot is built using robotics technology and affordable components from 3D printers, allowing it to be accessible to a wide range of users, including students, educators, and researchers working with limited resources.
The Shakebot is capable of simulating strong earthquake shaking, with the ability to reach a maximum horizontal acceleration of 11.8 m/s^2 (1.2 g) and a velocity of 0.5 m/s while supporting a 2 kg specimen. It is equipped with sensors, such as an accelerometer and a high-speed camera, to measure the motion of the shake table.
The researchers have also created a digital twin of the Shakebot, which is a virtual simulation of the physical device. This allows them to validate their simulation experiments by comparing the results to the physical experiments conducted with the Shakebot.
Technical Explanation
The Shakebot is designed to be a low-cost and accessible alternative to expensive or proprietary shake tables used in earthquake engineering research and education. It is built using the Robot Operating System (ROS) and principles of robotics, which allow for the integration of affordable and high-accuracy components from 3D printers.
The key components of the Shakebot include a closed-loop stepper motor for actuation and a toothed belt for transmission. This setup enables the shake table bed to reach a maximum horizontal acceleration of 11.8 m/s^2 (1.2 g) and a velocity of 0.5 m/s while supporting a 2 kg specimen.
To monitor the motion of the shake table, the Shakebot is equipped with an accelerometer and a high frame-rate camera. The ROS-based perception and motion software facilitate the transition of control programs from the virtual shake robot (digital twin) to the physical Shakebot, ensuring consistency between the simulation and physical experiments.
Critical Analysis
The paper presents a promising low-cost solution for earthquake engineering research and education, but it also acknowledges several limitations and areas for further research.
One potential concern is the maximum load capacity of 2 kg, which may limit the range of structures that can be tested on the Shakebot. Additionally, the paper does not provide detailed information on the reliability and repeatability of the Shakebot's performance, which would be crucial for its use in scientific research.
Further research could explore ways to increase the Shakebot's load capacity and improve the consistency of its motion, potentially through optimization-based system identification or adaptive control techniques. Additionally, the integration of the Shakebot with other robotic handling systems could expand its capabilities and potential applications.
Conclusion
The Shakebot represents a significant step towards making earthquake engineering research and education more accessible, particularly in resource-constrained settings. By leveraging affordable components and open-source software, the researchers have developed a shake table that can simulate strong earthquake shaking at a fraction of the cost of traditional solutions.
The Shakebot's integration with a digital twin and the use of ROS-based software further enhance its capabilities, allowing for consistent and validated simulation experiments. While the paper identifies some limitations, the Shakebot holds promise as a valuable tool for advancing ground motion research and engaging students and researchers in the field of earthquake engineering.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🧪
0
Shakebot: A Low-cost, Open-source Robotic Shake Table for Earthquake Research and Education
Zhiang Chen, Devin Keating, Yash Shethwala, Aravind Adhith Pandian Saravanakumaran, Ramon Arrowsmith, Albert Kottke, Christine Wittich, Jnaneshwar Das
Shake tables serve as a critical tool for simulating earthquake events and testing the response of structures to seismic forces. However, existing shake tables are either expensive or proprietary. This paper presents the design and implementation of a low-cost, open-source shake table named textit{Shakebot} for earthquake engineering research and education, built using Robot Operating System (ROS) and principles of robotics. The Shakebot adapts affordable and high-accuracy components from 3D printers, particularly a closed-loop stepper motor for actuation and a toothed belt for transmission. The stepper motor enables the bed to reach a maximum horizontal acceleration of 11.8 $m/s^2$ (1.2 $mathbf{g}$), and velocity of 0.5 $m/s$, with a 2 $kg$ specimen. The Shakebot is equipped with an accelerometer and a high frame-rate camera for bed motion estimation. The low cost and easy use make the Shakebot accessible to a wide range of users, including students, educators, and researchers in resource-constrained settings. The Shakebot, along with its digital twin--a virtual shake robot--has showcased significant potential in advancing ground motion research. Specifically, this study examines the dynamics of precariously balanced rocks. The Shakebot provides an approach to validate the simulation through physical experiments. The ROS-based perception and motion software facilitates the code transition from our virtual shake robot to the physical Shakebot. The reuse of the control programs ensures that the implemented ground motions are consistent for both the simulation and physical experiments, which is critical to validate our simulation experiments.
Read more7/2/2024
0
PCBot: a Minimalist Robot Designed for Swarm Applications
Jingxian Wang, Michael Rubenstein
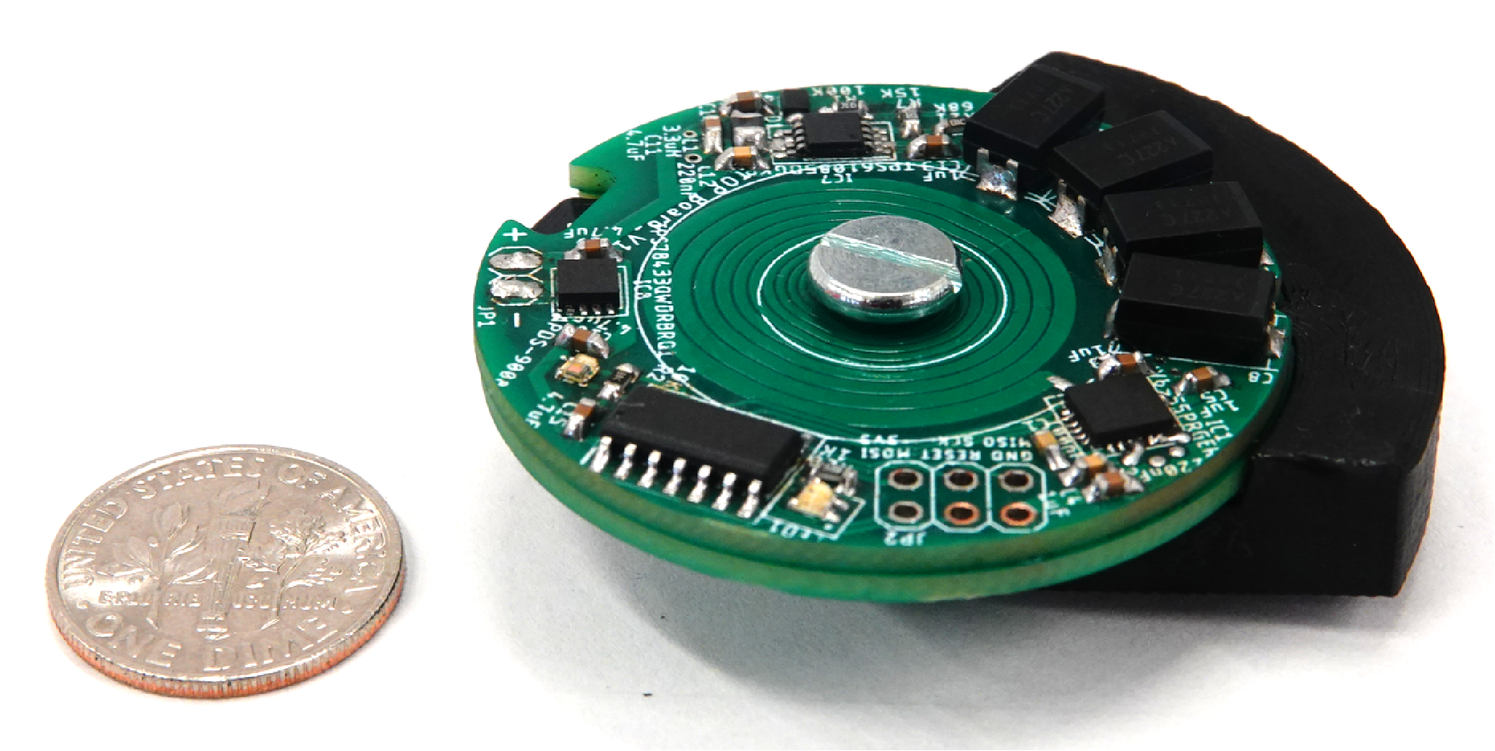
Complexity, cost, and power requirements for the actuation of individual robots can play a large factor in limiting the size of robotic swarms. Here we present PCBot, a minimalist robot that can precisely move on an orbital shake table using a bi-stable solenoid actuator built directly into its PCB. This allows the actuator to be built as part of the automated PCB manufacturing process, greatly reducing the impact it has on manual assembly. Thanks to this novel actuator design, PCBot has merely five major components and can be assembled in under 20 seconds, potentially enabling them to be easily mass-manufactured. Here we present the electro-magnetic and mechanical design of PCBot. Additionally, a prototype robot is used to demonstrate its ability to move in a straight line as well as follow given paths.
Read more4/9/2024

0
New!Additively Manufactured Open-Source Quadruped Robots for Multi-Robot SLAM Applications
Zachary Fuge, Benjamin Beiter, Alexander Leonessa
This work presents the design and development of the quadruped robot Squeaky to be used as a research and learning platform for single and multi-SLAM robotics, computer vision, and reinforcement learning. Affordable robots are becoming necessary when expanding from single to multi-robot applications, as the cost can increase exponentially as fleet size increases. SLAM is essential for a robot to perceive and localize within its environment to perform applications such as cave exploration, disaster assistance, and remote inspection. For improved efficiency, a fleet of robots can be employed to combine maps for multi-robot SLAM. Squeaky is an affordable quadrupedal robot, designed to have easily adaptable hardware and software, capable of creating a merged map under a shared network from multiple robots, and available open-source for the benefit of the research community.
Read more10/2/2024

0
Optimization-Based System Identification and Moving Horizon Estimation Using Low-Cost Sensors for a Miniature Car-Like Robot
Sabrina Bodmer, Lukas Vogel, Simon Muntwiler, Alexander Hansson, Tobias Bodewig, Jonas Wahlen, Melanie N. Zeilinger, Andrea Carron
This paper presents an open-source miniature car-like robot with low-cost sensing and a pipeline for optimization-based system identification, state estimation, and control. The overall robotics platform comes at a cost of less than $700 and thus significantly simplifies the verification of advanced algorithms in a realistic setting. We present a modified bicycle model with Pacejka tire forces to model the dynamics of the considered all-wheel drive vehicle and to prevent singularities of the model at low velocities. Furthermore, we provide an optimization-based system identification approach and a moving horizon estimation (MHE) scheme. In extensive hardware experiments, we show that the presented system identification approach results in a model with high prediction accuracy, while the MHE results in accurate state estimates. Finally, the overall closed-loop system is shown to perform well even in the presence of sensor failure for limited time intervals. All hardware, firmware, and control and estimation software is released under a BSD 2-clause license to promote widespread adoption and collaboration within the community.
Read more4/15/2024