Shape-Space Deformer: Unified Visuo-Tactile Representations for Robotic Manipulation of Deformable Objects

0

Sign in to get full access
Overview
- Presents a novel approach called "Shape-Space Deformer" for unified visuo-tactile representations to enable robotic manipulation of deformable objects
- Key contribution is a learning-based deformation model that can predict realistic deformations from vision and touch inputs
- Enables robots to accurately manipulate and control the shape of deformable objects through coordination of visual and tactile sensing
Plain English Explanation
The paper introduces a new technique called the "Shape-Space Deformer" that allows robots to effectively manipulate and control the shape of deformable objects. Deformable objects, like a piece of cloth or a rubber ball, can change shape in complex ways that are difficult for robots to understand and interact with.
The Shape-Space Deformer creates a unified representation of how the object looks (visual) and how it feels (tactile). This allows the robot to predict how the object will deform and change shape when it interacts with it. By combining visual and tactile information, the robot can coordinate its actions to precisely control the object's shape.
For example, if the robot is trying to fold a piece of cloth, it can use the Shape-Space Deformer to understand how the cloth will bend and crease based on where it touches and applies force. This allows the robot to plan its movements and actions to achieve the desired folded shape, rather than just randomly manipulating the cloth and hoping for the best.
The key innovation is this unified representation that bridges the visual and tactile domains, enabling the robot to build an accurate model of how the deformable object will respond to its interactions. This is a significant advance in the field of robotic manipulation of non-rigid, deformable objects.
Technical Explanation
The paper proposes a novel Shape-Space Deformer framework that learns a unified visuo-tactile representation for enabling robotic manipulation of deformable objects. The core technical contribution is a learning-based deformation model that can predict realistic deformations from both visual and tactile inputs.
The architecture consists of two main components: a vision encoder that extracts visual features, and a tactile encoder that processes touch sensor data. These features are then combined and fed into a deformation prediction network that outputs the expected deformation of the object.
The authors demonstrate the effectiveness of their approach through extensive experiments on a variety of deformable objects, showing that the Shape-Space Deformer can accurately model and control object deformations compared to prior state-of-the-art methods.
Critical Analysis
The paper presents a compelling approach to the challenging problem of robotic manipulation of deformable objects. The authors acknowledge that their method has some limitations, such as requiring a significant amount of training data and being sensitive to the quality of the visual and tactile inputs.
Additionally, the paper does not address how the Shape-Space Deformer would handle highly dynamic or unpredictable deformations, which could be an important consideration for real-world applications.
Further research could explore ways to reduce the reliance on large training datasets, as well as investigate methods to improve the model's robustness and generalization to a wider range of deformable object types and manipulation scenarios.
Conclusion
The Shape-Space Deformer represents a significant advancement in the field of robotic manipulation of deformable objects. By unifying visual and tactile representations, the approach enables robots to accurately predict and control the deformation of non-rigid objects, a capability that is crucial for many real-world applications, such as textile handling, surgical robotics, and assistive technology.
The technical insights and experimental results presented in this paper lay the groundwork for further developments in this area, which could ultimately lead to more dexterous, adaptive, and versatile robotic systems capable of seamlessly interacting with the deformable world around them.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!Shape-Space Deformer: Unified Visuo-Tactile Representations for Robotic Manipulation of Deformable Objects
Sean M. V. Collins, Brendan Tidd, Mahsa Baktashmotlagh, Peyman Moghadam
Accurate modelling of object deformations is crucial for a wide range of robotic manipulation tasks, where interacting with soft or deformable objects is essential. Current methods struggle to generalise to unseen forces or adapt to new objects, limiting their utility in real-world applications. We propose Shape-Space Deformer, a unified representation for encoding a diverse range of object deformations using template augmentation to achieve robust, fine-grained reconstructions that are resilient to outliers and unwanted artefacts. Our method improves generalization to unseen forces and can rapidly adapt to novel objects, significantly outperforming existing approaches. We perform extensive experiments to test a range of force generalisation settings and evaluate our method's ability to reconstruct unseen deformations, demonstrating significant improvements in reconstruction accuracy and robustness. Our approach is suitable for real-time performance, making it ready for downstream manipulation applications.
Read more9/20/2024
0
Soft Contact Simulation and Manipulation Learning of Deformable Objects with Vision-based Tactile Sensor
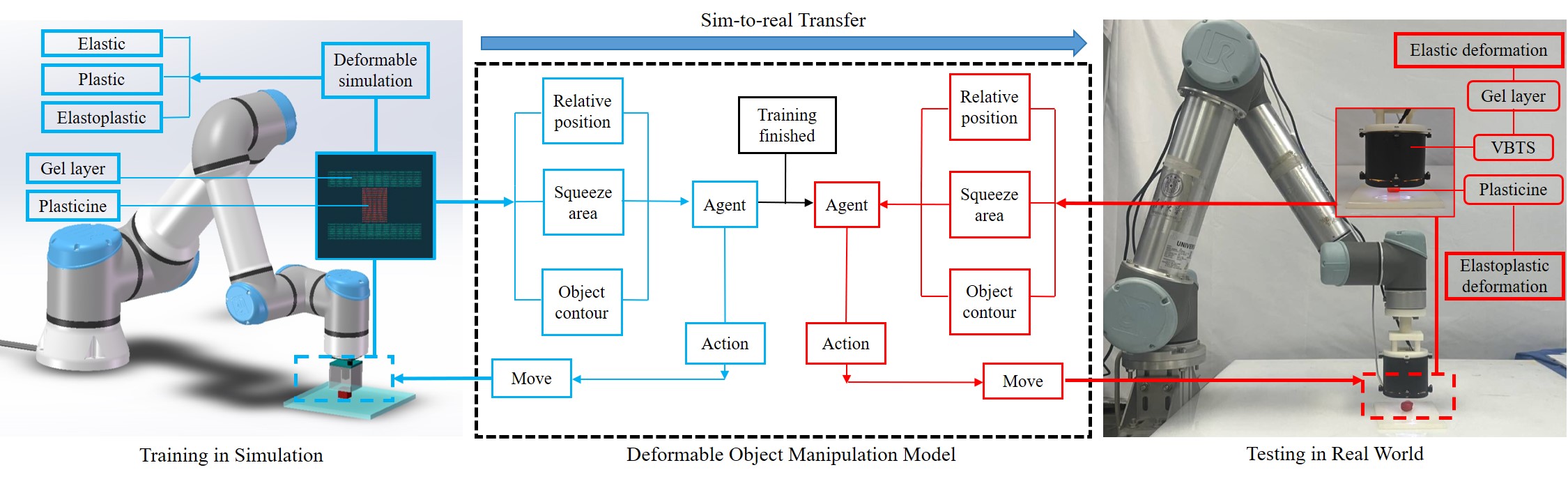
Jianhua Shan, Yuhao Sun, Shixin Zhang, Fuchun Sun, Zixi Chen, Zirong Shen, Cesare Stefanini, Yiyong Yang, Shan Luo, Bin Fang
Deformable object manipulation is a classical and challenging research area in robotics. Compared with rigid object manipulation, this problem is more complex due to the deformation properties including elastic, plastic, and elastoplastic deformation. In this paper, we describe a new deformable object manipulation method including soft contact simulation, manipulation learning, and sim-to-real transfer. We propose a novel approach utilizing Vision-Based Tactile Sensors (VBTSs) as the end-effector in simulation to produce observations like relative position, squeezed area, and object contour, which are transferable to real robots. For a more realistic contact simulation, a new simulation environment including elastic, plastic, and elastoplastic deformations is created. We utilize RL strategies to train agents in the simulation, and expert demonstrations are applied for challenging tasks. Finally, we build a real experimental platform to complete the sim-to-real transfer and achieve a 90% success rate on difficult tasks such as cylinder and sphere. To test the robustness of our method, we use plasticine of different hardness and sizes to repeat the tasks including cylinder and sphere. The experimental results show superior performances of deformable object manipulation with the proposed method.
Read more5/14/2024

0
New!Optimal Cosserat-based deformation control for robotic manipulation of linear objects
Azad Artinian, Faiz Ben Amar, Veronique Perdereau
The robotic shape control of deformable linear objects has garnered increasing interest within the robotics community. Despite recent progress, the majority of shape control approaches can be classified into two main groups: open-loop control, which relies on physically realistic models to represent the object, and closed-loop control, which employs less precise models alongside visual data to compute commands. In this work, we present a novel 3D shape control approach that includes the physically realistic Cosserat model into a closed-loop control framework, using vision feedback to rectify errors in real-time. This approach capitalizes on the advantages of both groups: the realism and precision provided by physics-based models, and the rapid computation, therefore enabling real-time correction of model errors, and robustness to elastic parameter estimation inherent in vision-based approaches. This is achieved by computing a deformation Jacobian derived from both the Cosserat model and visual data. To demonstrate the effectiveness of the method, we conduct a series of shape control experiments where robots are tasked with deforming linear objects towards a desired shape.
Read more9/20/2024

0
Interactive Perception for Deformable Object Manipulation
Zehang Weng, Peng Zhou, Hang Yin, Alexander Kravberg, Anastasiia Varava, David Navarro-Alarcon, Danica Kragic
Interactive perception enables robots to manipulate the environment and objects to bring them into states that benefit the perception process. Deformable objects pose challenges to this due to significant manipulation difficulty and occlusion in vision-based perception. In this work, we address such a problem with a setup involving both an active camera and an object manipulator. Our approach is based on a sequential decision-making framework and explicitly considers the motion regularity and structure in coupling the camera and manipulator. We contribute a method for constructing and computing a subspace, called Dynamic Active Vision Space (DAVS), for effectively utilizing the regularity in motion exploration. The effectiveness of the framework and approach are validated in both a simulation and a real dual-arm robot setup. Our results confirm the necessity of an active camera and coordinative motion in interactive perception for deformable objects.
Read more6/12/2024