A Sim-to-Real Vision-based Lane Keeping System for a 1:10-scale Autonomous Vehicle

0
Sign in to get full access
Overview
- This paper presents a vision-based lane keeping system for a 1:10-scale autonomous vehicle.
- The system uses a camera to detect lane markings and a pure pursuit controller to steer the vehicle.
- The authors train the system in simulation and then test it on a real-world vehicle.
Plain English Explanation
In this paper, the researchers developed a system to help a small self-driving car stay in its lane using only a camera and some computer vision techniques. [^1] The key idea is to first train the system in a computer simulation, where it can learn to recognize lane markings and steer the car accordingly. Then, they tested this trained system on a real physical model car to see how well it could handle the transition from the simulated world to the real world.
[^1]: <a href="https://aimodels.fyi/papers/arxiv/sim-to-real-vision-based-lane-keeping">Sim-to-Real Vision-based Lane Keeping</a>
The system works by using the camera on the car to continuously look for the lane markings on the road. It then uses a control algorithm called "pure pursuit" to steer the car and keep it centered in the lane. The benefit of this approach is that it doesn't require any expensive sensors like GPS or lidar - just a standard camera is enough.
By training the system in simulation first, the researchers were able to teach it how to recognize lanes and steer without the risk of crashing the real car during the learning process. Once the simulation training was complete, they put the system on the physical model car and found that it was able to successfully keep the car centered in its lane, even on roads it had never seen before.
Technical Explanation
The authors developed a vision-based lane keeping system for a 1:10-scale autonomous vehicle. [^2] They used a camera mounted on the vehicle to detect the lane markings, and a pure pursuit controller to steer the vehicle and keep it centered in the lane.
[^2]: <a href="https://aimodels.fyi/papers/arxiv/sim-to-real-vision-based-lane-keeping">A Sim-to-Real Vision-based Lane Keeping System for a 1:10-scale Autonomous Vehicle</a>
The authors first trained the system in simulation, where they could experiment with different computer vision techniques and control algorithms without risking damage to the physical vehicle. They used a simulated environment that closely matched the real-world testing environment, including realistic vehicle dynamics and lane layouts.
After the simulation training, the authors deployed the system on a physical 1:10-scale autonomous vehicle and tested it on real-world roads. They found that the system was able to successfully keep the vehicle centered in its lane, even on roads it had never encountered before.
The key technical contributions of the paper include:
- A vision-based lane detection and tracking algorithm that can operate in a sim-to-real setting.
- A pure pursuit controller that can steer the vehicle to keep it centered in the detected lane.
- An evaluation of the system's performance on a physical 1:10-scale autonomous vehicle.
Critical Analysis
The authors acknowledge several limitations of their work. First, the system was only tested on a 1:10-scale vehicle, so its performance on full-size autonomous vehicles is still an open question. [^3] Additionally, the system was only evaluated on relatively simple, straight roads - more complex environments with sharp turns, intersections, or other obstacles were not considered.
[^3]: <a href="https://aimodels.fyi/papers/arxiv/developing-analyzing-evaluating-vehicular-lane-keeping-algorithms">Developing, Analyzing, and Evaluating Vehicular Lane Keeping Algorithms</a>
Another limitation is the reliance on a camera as the sole sensor. While this can reduce cost and complexity, it also makes the system more vulnerable to environmental conditions like poor lighting or occlusions. Incorporating additional sensors, such as GPS or lidar, could potentially improve the system's robustness and reliability.
Finally, the authors did not provide a direct comparison to other lane keeping approaches, such as those based on classical control theory or deep learning. A more thorough comparative analysis would help to better understand the strengths and weaknesses of their vision-based, pure pursuit-based approach.
Conclusion
This paper presents a promising vision-based lane keeping system for autonomous vehicles, demonstrated on a 1:10-scale model. By leveraging simulation-based training, the authors were able to develop a controller that could successfully keep the vehicle centered in its lane on real-world roads.
While the authors acknowledge several limitations, this work represents an important step towards developing cost-effective, camera-based autonomy systems that can bridge the gap between simulation and reality. Future research could explore ways to expand the system's capabilities, improve its robustness, and compare its performance to other state-of-the-art approaches.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
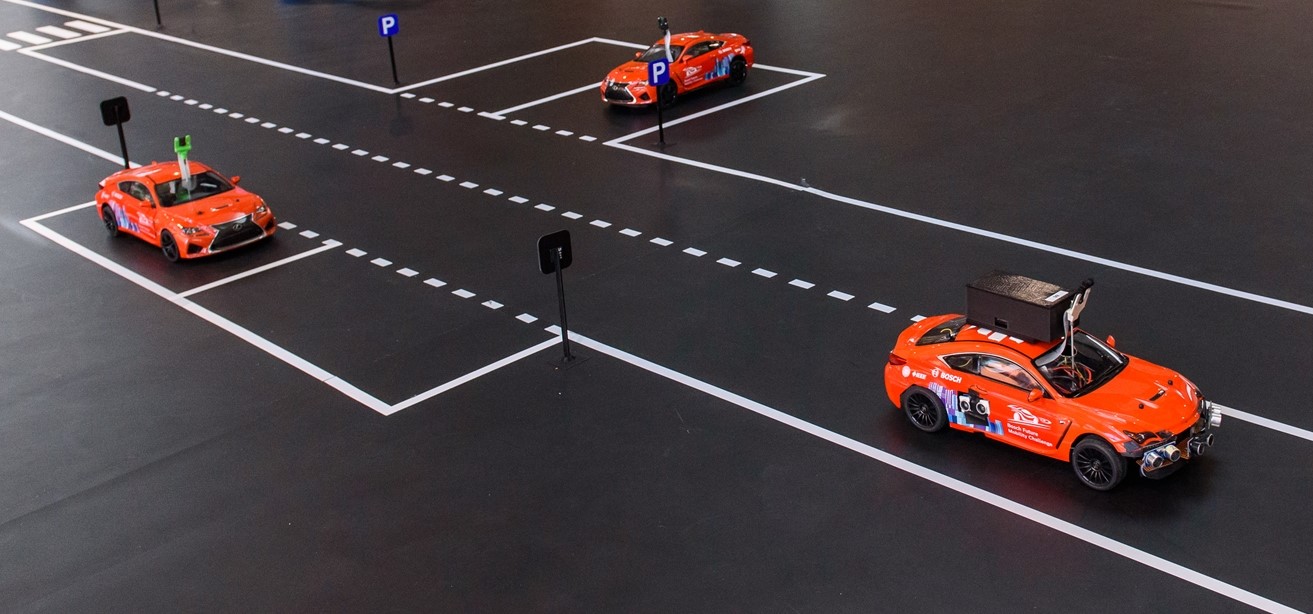
A Sim-to-Real Vision-based Lane Keeping System for a 1:10-scale Autonomous Vehicle
Antonio Gallina, Matteo Grandin, Angelo Cenedese, Mattia Bruschetta
In recent years, several competitions have highlighted the need to investigate vision-based solutions to address scenarios with functional insufficiencies in perception, world modeling and localization. This article presents the Vision-based Lane Keeping System (VbLKS) developed by the DEI-Unipd Team within the context of the Bosch Future Mobility Challenge 2022. The main contribution lies in a Simulation-to-Reality (Sim2Real) GPS-denied VbLKS for a 1:10-scale autonomous vehicle. In this VbLKS, the input to a tailored Pure Pursuit (PP) based control strategy, namely the Lookahead Heading Error (LHE), is estimated at a constant lookahead distance employing a Convolutional Neural Network (CNN). A training strategy for a compact CNN is proposed, emphasizing data generation and augmentation on simulated camera images from a 3D Gazebo simulator, and enabling real-time operation on low-level hardware. A tailored PP-based lateral controller equipped with a derivative action and a PP-based velocity reference generation are implemented. Tuning ranges are established through a systematic time-delay stability analysis. Validation in a representative controlled laboratory setting is provided.
Read more9/27/2024

0
Developing, Analyzing, and Evaluating Vehicular Lane Keeping Algorithms Under Dynamic Lighting and Weather Conditions Using Electric Vehicles
Michael Khalfin, Jack Volgren, Matthew Jones, Luke LeGoullon, Joshua Siegel, Chan-Jin Chung
Self-driving vehicles have the potential to reduce accidents and fatalities on the road. Many production vehicles already come equipped with basic self-driving capabilities, but have trouble following lanes in adverse lighting and weather conditions. Therefore, we develop, analyze, and evaluate two vehicular lane-keeping algorithms under dynamic weather conditions using a combined deep learning- and hand-crafted approach and an end-to-end deep learning approach. We use image segmentation- and linear-regression based deep learning to drive the vehicle toward the center of the lane, measuring the amount of laps completed, average speed, and average steering error per lap. Our hybrid model completes more laps than our end-to-end deep learning model. In the future, we are interested in combining our algorithms to form one cohesive approach to lane-following.
Read more6/12/2024

0
Tapping in a Remote Vehicle's onboard LLM to Complement the Ego Vehicle's Field-of-View
Malsha Ashani Mahawatta Dona, Beatriz Cabrero-Daniel, Yinan Yu, Christian Berger
Today's advanced automotive systems are turning into intelligent Cyber-Physical Systems (CPS), bringing computational intelligence to their cyber-physical context. Such systems power advanced driver assistance systems (ADAS) that observe a vehicle's surroundings for their functionality. However, such ADAS have clear limitations in scenarios when the direct line-of-sight to surrounding objects is occluded, like in urban areas. Imagine now automated driving (AD) systems that ideally could benefit from other vehicles' field-of-view in such occluded situations to increase traffic safety if, for example, locations about pedestrians can be shared across vehicles. Current literature suggests vehicle-to-infrastructure (V2I) via roadside units (RSUs) or vehicle-to-vehicle (V2V) communication to address such issues that stream sensor or object data between vehicles. When considering the ongoing revolution in vehicle system architectures towards powerful, centralized processing units with hardware accelerators, foreseeing the onboard presence of large language models (LLMs) to improve the passengers' comfort when using voice assistants becomes a reality. We are suggesting and evaluating a concept to complement the ego vehicle's field-of-view (FOV) with another vehicle's FOV by tapping into their onboard LLM to let the machines have a dialogue about what the other vehicle ``sees''. Our results show that very recent versions of LLMs, such as GPT-4V and GPT-4o, understand a traffic situation to an impressive level of detail, and hence, they can be used even to spot traffic participants. However, better prompts are needed to improve the detection quality and future work is needed towards a standardised message interchange format between vehicles.
Read more8/21/2024

0
Behavioral Cloning Models Reality Check for Autonomous Driving
Mustafa Yildirim, Barkin Dagda, Vinal Asodia, Saber Fallah
How effective are recent advancements in autonomous vehicle perception systems when applied to real-world autonomous vehicle control? While numerous vision-based autonomous vehicle systems have been trained and evaluated in simulated environments, there is a notable lack of real-world validation for these systems. This paper addresses this gap by presenting the real-world validation of state-of-the-art perception systems that utilize Behavior Cloning (BC) for lateral control, processing raw image data to predict steering commands. The dataset was collected using a scaled research vehicle and tested on various track setups. Experimental results demonstrate that these methods predict steering angles with low error margins in real-time, indicating promising potential for real-world applications.
Read more9/12/2024