Simplicits: Mesh-Free, Geometry-Agnostic, Elastic Simulation

0
↗️
Sign in to get full access
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
↗️
0
Simplicits: Mesh-Free, Geometry-Agnostic, Elastic Simulation
Vismay Modi, Nicholas Sharp, Or Perel, Shinjiro Sueda, David I. W. Levin
The proliferation of 3D representations, from explicit meshes to implicit neural fields and more, motivates the need for simulators agnostic to representation. We present a data-, mesh-, and grid-free solution for elastic simulation for any object in any geometric representation undergoing large, nonlinear deformations. We note that every standard geometric representation can be reduced to an occupancy function queried at any point in space, and we define a simulator atop this common interface. For each object, we fit a small implicit neural network encoding spatially varying weights that act as a reduced deformation basis. These weights are trained to learn physically significant motions in the object via random perturbations. Our loss ensures we find a weight-space basis that best minimizes deformation energy by stochastically evaluating elastic energies through Monte Carlo sampling of the deformation volume. At runtime, we simulate in the reduced basis and sample the deformations back to the original domain. Our experiments demonstrate the versatility, accuracy, and speed of this approach on data including signed distance functions, point clouds, neural primitives, tomography scans, radiance fields, Gaussian splats, surface meshes, and volume meshes, as well as showing a variety of material energies, contact models, and time integration schemes.
Read more7/16/2024
0
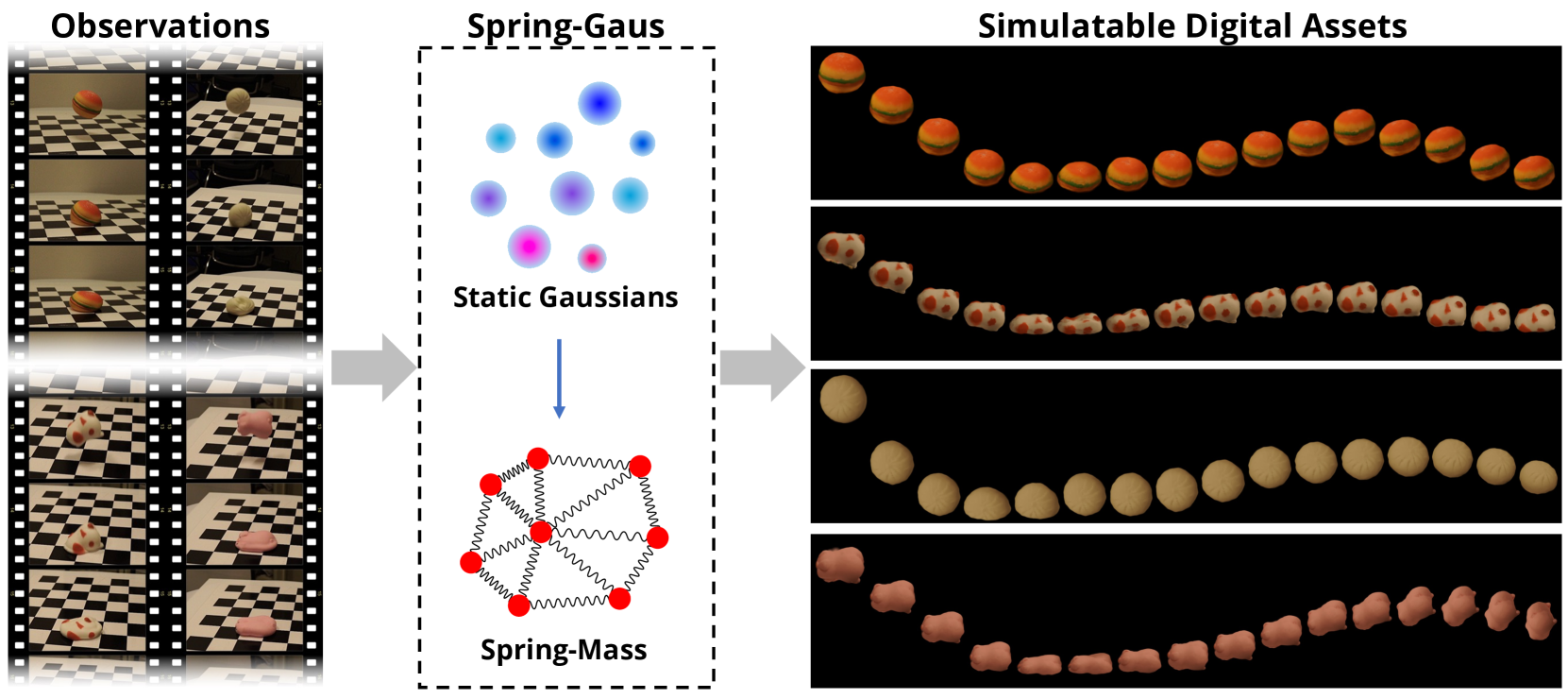
Reconstruction and Simulation of Elastic Objects with Spring-Mass 3D Gaussians
Licheng Zhong, Hong-Xing Yu, Jiajun Wu, Yunzhu Li
Reconstructing and simulating elastic objects from visual observations is crucial for applications in computer vision and robotics. Existing methods, such as 3D Gaussians, model 3D appearance and geometry, but lack the ability to estimate physical properties for objects and simulate them. The core challenge lies in integrating an expressive yet efficient physical dynamics model. We propose Spring-Gaus, a 3D physical object representation for reconstructing and simulating elastic objects from videos of the object from multiple viewpoints. In particular, we develop and integrate a 3D Spring-Mass model into 3D Gaussian kernels, enabling the reconstruction of the visual appearance, shape, and physical dynamics of the object. Our approach enables future prediction and simulation under various initial states and environmental properties. We evaluate Spring-Gaus on both synthetic and real-world datasets, demonstrating accurate reconstruction and simulation of elastic objects. Project page: https://zlicheng.com/spring_gaus/.
Read more7/22/2024
🧠
0
NeuralClothSim: Neural Deformation Fields Meet the Thin Shell Theory
Navami Kairanda, Marc Habermann, Christian Theobalt, Vladislav Golyanik
Despite existing 3D cloth simulators producing realistic results, they predominantly operate on discrete surface representations (e.g. points and meshes) with a fixed spatial resolution, which often leads to large memory consumption and resolution-dependent simulations. Moreover, back-propagating gradients through the existing solvers is difficult, and they cannot be easily integrated into modern neural architectures. In response, this paper re-thinks physically plausible cloth simulation: We propose NeuralClothSim, i.e., a new quasistatic cloth simulator using thin shells, in which surface deformation is encoded in neural network weights in the form of a neural field. Our memory-efficient solver operates on a new continuous coordinate-based surface representation called neural deformation fields (NDFs); it supervises NDF equilibria with the laws of the non-linear Kirchhoff-Love shell theory with a non-linear anisotropic material model. NDFs are adaptive: They 1) allocate their capacity to the deformation details and 2) allow surface state queries at arbitrary spatial resolutions without re-training. We show how to train NeuralClothSim while imposing hard boundary conditions and demonstrate multiple applications, such as material interpolation and simulation editing. The experimental results highlight the effectiveness of our continuous neural formulation.
Read more6/17/2024

0
Reconstructing and Simulating Dynamic 3D Objects with Mesh-adsorbed Gaussian Splatting
Shaojie Ma, Yawei Luo, Yi Yang
3D reconstruction and simulation, while interrelated, have distinct objectives: reconstruction demands a flexible 3D representation adaptable to diverse scenes, whereas simulation requires a structured representation to model motion principles effectively. This paper introduces the Mesh-adsorbed Gaussian Splatting (MaGS) method to resolve such a dilemma. MaGS constrains 3D Gaussians to hover on the mesh surface, creating a mutual-adsorbed mesh-Gaussian 3D representation that combines the rendering flexibility of 3D Gaussians with the spatial coherence of meshes. Leveraging this representation, we introduce a learnable Relative Deformation Field (RDF) to model the relative displacement between the mesh and 3D Gaussians, extending traditional mesh-driven deformation paradigms that only rely on ARAP prior, thus capturing the motion of each 3D Gaussian more precisely. By joint optimizing meshes, 3D Gaussians, and RDF, MaGS achieves both high rendering accuracy and realistic deformation. Extensive experiments on the D-NeRF and NeRF-DS datasets demonstrate that MaGS can generate competitive results in both reconstruction and simulation.
Read more6/4/2024