NeuralClothSim: Neural Deformation Fields Meet the Thin Shell Theory

0
🧠
Sign in to get full access
Overview
- Existing 3D cloth simulators use discrete surface representations like points and meshes, which can be memory-intensive and resolution-dependent
- Backpropagating gradients through these simulators is challenging, and they don't integrate well with modern neural architectures
- This paper proposes a new approach called NeuralClothSim that uses a continuous neural field representation to simulate cloth deformation
Plain English Explanation
NeuralClothSim: A Continuous Neural Approach to Physically Plausible Cloth Simulation presents a novel way to simulate the behavior of cloth, such as clothing, using neural networks.
Typical 3D cloth simulators work by breaking the cloth down into discrete points or small mesh elements. This can require a lot of memory and the results depend on the resolution of the simulation. Additionally, it's difficult to backpropagate gradients through these simulators, which makes it hard to integrate them with modern machine learning techniques.
Instead, NeuralClothSim represents the cloth as a continuous neural deformation field (NDF). This means the cloth's surface and deformation are encoded in the weights of a neural network, rather than a discrete mesh. This allows the simulator to adaptively allocate its "capacity" to capture important details of the cloth's motion and appearance.
The NDF-based simulator is able to operate efficiently, querying the state of the cloth at any spatial resolution without needing to retrain the model. It also allows for easy integration with other neural network-based systems, as the gradients can be backpropagated through the simulator.
Technical Explanation
NeuralClothSim proposes a new continuous neural field representation for cloth simulation, called neural deformation fields (NDFs). NDFs encode the cloth's surface and deformation in the weights of a neural network, rather than a discrete mesh or point cloud representation.
The authors develop a memory-efficient solver that supervises the NDF equilibria using the laws of non-linear Kirchhoff-Love shell theory with a non-linear anisotropic material model. This allows the simulator to produce physically plausible cloth deformation without the limitations of discrete representations.
Unlike traditional simulators, NDFs are adaptive - they allocate their "capacity" to capture important deformation details, and enable surface state queries at arbitrary spatial resolutions without retraining. This makes the simulation both efficient and high-fidelity.
The authors also show how to train NeuralClothSim while imposing hard boundary conditions, enabling applications like material interpolation and simulation editing. The experimental results demonstrate the effectiveness of the continuous neural field formulation compared to discrete approaches.
Critical Analysis
The paper presents a compelling approach to cloth simulation that addresses several limitations of existing techniques. By using a continuous neural field representation, NeuralClothSim is able to produce high-quality results while being more memory-efficient and resolution-independent than traditional discrete simulators.
However, the paper does not discuss the computational costs of the neural network-based solver, nor how it compares to state-of-the-art discrete simulators in terms of simulation speed. Additionally, the material models and boundary conditions used in the experiments may not capture the full complexity of real-world cloth behavior.
Further research could explore ways to make the NDF-based solver even more efficient, perhaps by leveraging implicit neural representations or other advanced neural network architectures. Integrating NeuralClothSim with other neural-based simulation techniques, such as dynamic LiDAR re-simulation or dynamic 3D scene modeling, could also unlock new applications and capabilities.
Conclusion
NeuralClothSim presents a novel approach to cloth simulation that overcomes the limitations of traditional discrete simulators. By using a continuous neural field representation, the method can produce realistic cloth deformation while being more memory-efficient and adaptable to different resolutions.
This research demonstrates the potential of neural networks to transform physical simulation, enhancing dynamic imaging and reconstruction in various domains. As neural architectures continue to advance, we can expect to see more innovative simulation techniques that seamlessly integrate with machine learning pipelines.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🧠
0
NeuralClothSim: Neural Deformation Fields Meet the Thin Shell Theory
Navami Kairanda, Marc Habermann, Christian Theobalt, Vladislav Golyanik
Despite existing 3D cloth simulators producing realistic results, they predominantly operate on discrete surface representations (e.g. points and meshes) with a fixed spatial resolution, which often leads to large memory consumption and resolution-dependent simulations. Moreover, back-propagating gradients through the existing solvers is difficult, and they cannot be easily integrated into modern neural architectures. In response, this paper re-thinks physically plausible cloth simulation: We propose NeuralClothSim, i.e., a new quasistatic cloth simulator using thin shells, in which surface deformation is encoded in neural network weights in the form of a neural field. Our memory-efficient solver operates on a new continuous coordinate-based surface representation called neural deformation fields (NDFs); it supervises NDF equilibria with the laws of the non-linear Kirchhoff-Love shell theory with a non-linear anisotropic material model. NDFs are adaptive: They 1) allocate their capacity to the deformation details and 2) allow surface state queries at arbitrary spatial resolutions without re-training. We show how to train NeuralClothSim while imposing hard boundary conditions and demonstrate multiple applications, such as material interpolation and simulation editing. The experimental results highlight the effectiveness of our continuous neural formulation.
Read more6/17/2024

0
A Neural-Network-Based Approach for Loose-Fitting Clothing
Yongxu Jin, Dalton Omens, Zhenglin Geng, Joseph Teran, Abishek Kumar, Kenji Tashiro, Ronald Fedkiw
Since loose-fitting clothing contains dynamic modes that have proven to be difficult to predict via neural networks, we first illustrate how to coarsely approximate these modes with a real-time numerical algorithm specifically designed to mimic the most important ballistic features of a classical numerical simulation. Although there is some flexibility in the choice of the numerical algorithm used as a proxy for full simulation, it is essential that the stability and accuracy be independent from any time step restriction or similar requirements in order to facilitate real-time performance. In order to reduce the number of degrees of freedom that require approximations to their dynamics, we simulate rigid frames and use skinning to reconstruct a rough approximation to a desirable mesh; as one might expect, neural-network-based skinning seems to perform better than linear blend skinning in this scenario. Improved high frequency deformations are subsequently added to the skinned mesh via a quasistatic neural network (QNN). In contrast to recurrent neural networks that require a plethora of training data in order to adequately generalize to new examples, QNNs perform well with significantly less training data.
Read more4/29/2024
↗️
0
Simplicits: Mesh-Free, Geometry-Agnostic, Elastic Simulation
Vismay Modi, Nicholas Sharp, Or Perel, Shinjiro Sueda, David I. W. Levin
The proliferation of 3D representations, from explicit meshes to implicit neural fields and more, motivates the need for simulators agnostic to representation. We present a data-, mesh-, and grid-free solution for elastic simulation for any object in any geometric representation undergoing large, nonlinear deformations. We note that every standard geometric representation can be reduced to an occupancy function queried at any point in space, and we define a simulator atop this common interface. For each object, we fit a small implicit neural network encoding spatially varying weights that act as a reduced deformation basis. These weights are trained to learn physically significant motions in the object via random perturbations. Our loss ensures we find a weight-space basis that best minimizes deformation energy by stochastically evaluating elastic energies through Monte Carlo sampling of the deformation volume. At runtime, we simulate in the reduced basis and sample the deformations back to the original domain. Our experiments demonstrate the versatility, accuracy, and speed of this approach on data including signed distance functions, point clouds, neural primitives, tomography scans, radiance fields, Gaussian splats, surface meshes, and volume meshes, as well as showing a variety of material energies, contact models, and time integration schemes.
Read more7/16/2024
0
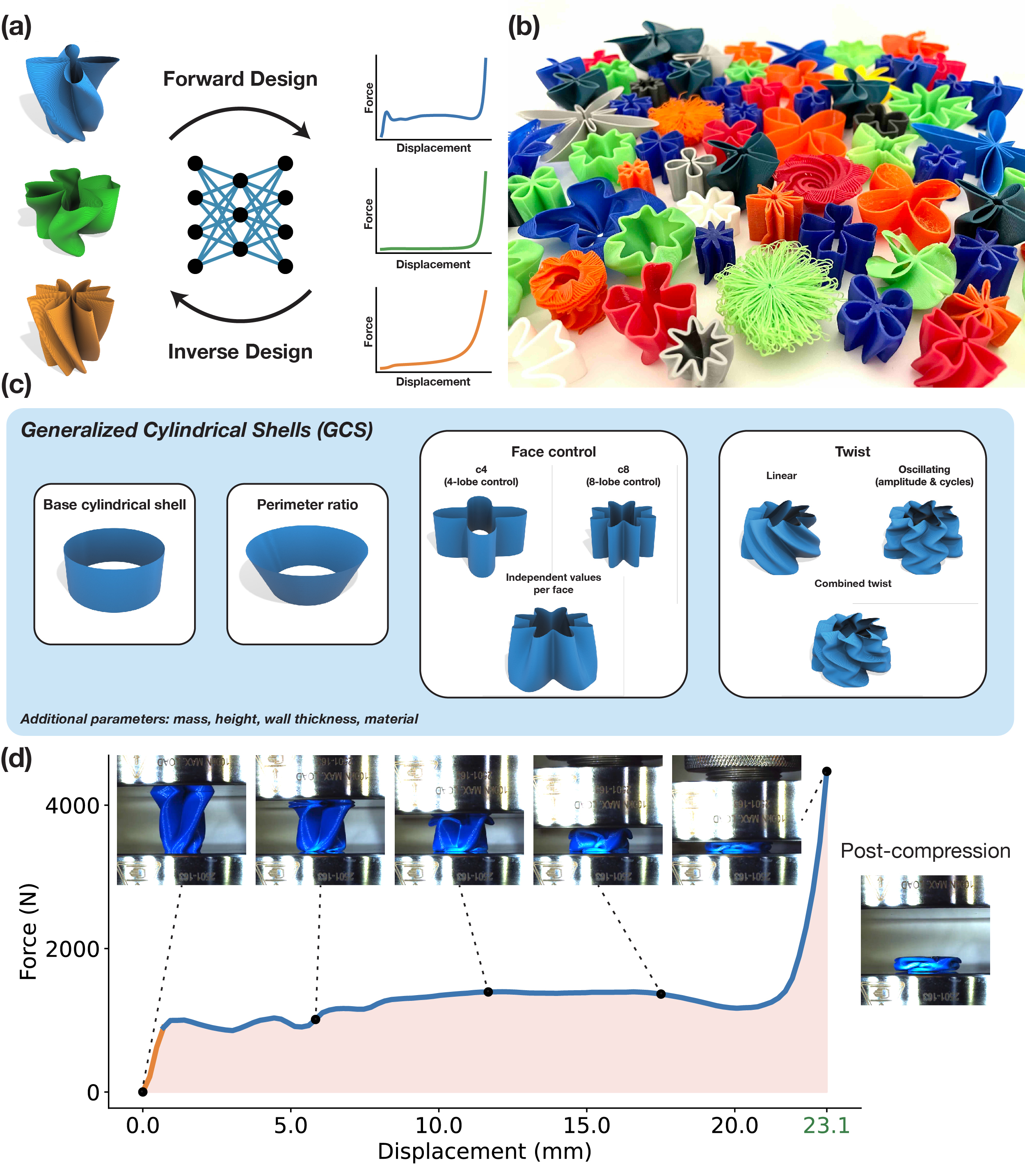
Data-Driven Nonlinear Deformation Design of 3D-Printable Shells
Samuel Silverman, Kelsey L. Snapp, Keith A. Brown, Emily Whiting
Designing and fabricating structures with specific mechanical properties requires understanding the intricate relationship between design parameters and performance. Understanding the design-performance relationship becomes increasingly complicated for nonlinear deformations. Though successful at modeling elastic deformations, simulation-based techniques struggle to model large elastoplastic deformations exhibiting plasticity and densification. We propose a neural network trained on experimental data to learn the design-performance relationship between 3D-printable shells and their compressive force-displacement behavior. Trained on thousands of physical experiments, our network aids in both forward and inverse design to generate shells exhibiting desired elastoplastic and hyperelastic deformations. We validate a subset of generated designs through fabrication and testing. Furthermore, we demonstrate the network's inverse design efficacy in generating custom shells for several applications.
Read more8/28/2024