SMART: Scalable Multi-agent Real-time Simulation via Next-token Prediction

0
Sign in to get full access
Overview
- Introduces a new approach called SMART (Scalable Multi-agent Real-time Simulation via Next-token Prediction) for real-time simulation of multi-agent systems
- Leverages a neural network model that can predict the next action of each agent in the simulation, allowing for more efficient and scalable real-time simulation
- Evaluated on several benchmarks, showing improvements in simulation speed and accuracy compared to existing methods
Plain English Explanation
The paper presents a new technique called SMART for simulating the behavior of multiple agents, such as vehicles or robots, in real-time. Current simulation methods can struggle to keep up with the complexity of these systems, especially as the number of agents increases.
SMART addresses this by using a neural network model to predict what each agent will do next, rather than simulating every detail of their movements. This allows the simulation to run much faster, while still producing realistic results. The neural network is trained on data from previous simulations or real-world observations, so it can learn to anticipate how agents will react in different situations.
By focusing on predicting the "next move" of each agent, SMART is able to provide a scalable and efficient way to simulate large, complex multi-agent systems in real-time. This could be useful for applications like self-driving car development, robot coordination, or urban planning, where understanding how many interacting agents will behave is crucial.
Technical Explanation
The paper introduces a new approach called SMART (Scalable Multi-agent Real-time Simulation via Next-token Prediction) for real-time simulation of multi-agent systems. SMART leverages a neural network model that can predict the next action of each agent in the simulation, allowing for more efficient and scalable real-time simulation compared to traditional methods.
The key idea behind SMART is to frame the simulation problem as a "next-token prediction" task, where the model predicts the next action or "token" that each agent will take based on the current state of the simulation. This allows the simulation to progress by predicting the future actions of agents, rather than having to simulate every detail of their movements.
The SMART architecture consists of a neural network model that takes in the current state of the simulation (e.g., the positions and velocities of all agents) and outputs the predicted next actions for each agent. This model is trained on data from previous simulations or real-world observations, allowing it to learn patterns in how agents behave and interact.
The paper evaluates SMART on several benchmark scenarios, including traffic simulation and multi-robot coordination tasks. The results show that SMART is able to provide significant improvements in simulation speed and accuracy compared to existing methods, particularly as the number of agents increases. This demonstrates the potential of SMART for enabling scalable, real-time simulation of complex multi-agent systems.
Critical Analysis
The SMART approach presented in the paper offers a promising solution for improving the efficiency and scalability of real-time multi-agent simulation. By framing the problem as a next-token prediction task and leveraging a neural network model, SMART can provide significant speedups compared to traditional simulation methods.
One potential limitation of the SMART approach is that it relies on the accuracy of the neural network model in predicting agent actions. If the model's predictions are inaccurate or fail to capture important aspects of agent behavior, the simulated results may diverge from reality over time. The paper acknowledges this issue and suggests that techniques like online model adaptation or ensemble methods could be used to improve the model's robustness.
Another area for further research could be exploring the generalization capabilities of the SMART model. The paper focuses on evaluating SMART on specific benchmark scenarios, but it would be interesting to see how well the model performs on a wider range of multi-agent systems and task domains. Investigating the model's ability to adapt to new environments or handle unexpected agent behaviors could help identify the limits of the SMART approach and guide future improvements.
Conclusion
The SMART approach presented in this paper offers a novel and promising solution for enabling scalable, real-time simulation of complex multi-agent systems. By leveraging a neural network model to predict the next actions of agents, SMART can provide significant improvements in simulation speed and accuracy compared to traditional methods, particularly as the number of agents increases.
This research has important implications for a wide range of applications, such as self-driving car development, robot coordination, and urban planning, where understanding the emergent behavior of many interacting agents is crucial. The SMART approach could help enable more realistic and efficient simulations, leading to better-informed decision-making and the development of more robust and capable multi-agent systems.
While the SMART approach shows promising results, further research is needed to address potential limitations and explore its broader applicability. Continued advancements in this area could have a significant impact on the fields of multi-agent simulation and real-time decision-making for complex, dynamic systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
SMART: Scalable Multi-agent Real-time Simulation via Next-token Prediction
Wei Wu, Xiaoxin Feng, Ziyan Gao, Yuheng Kan
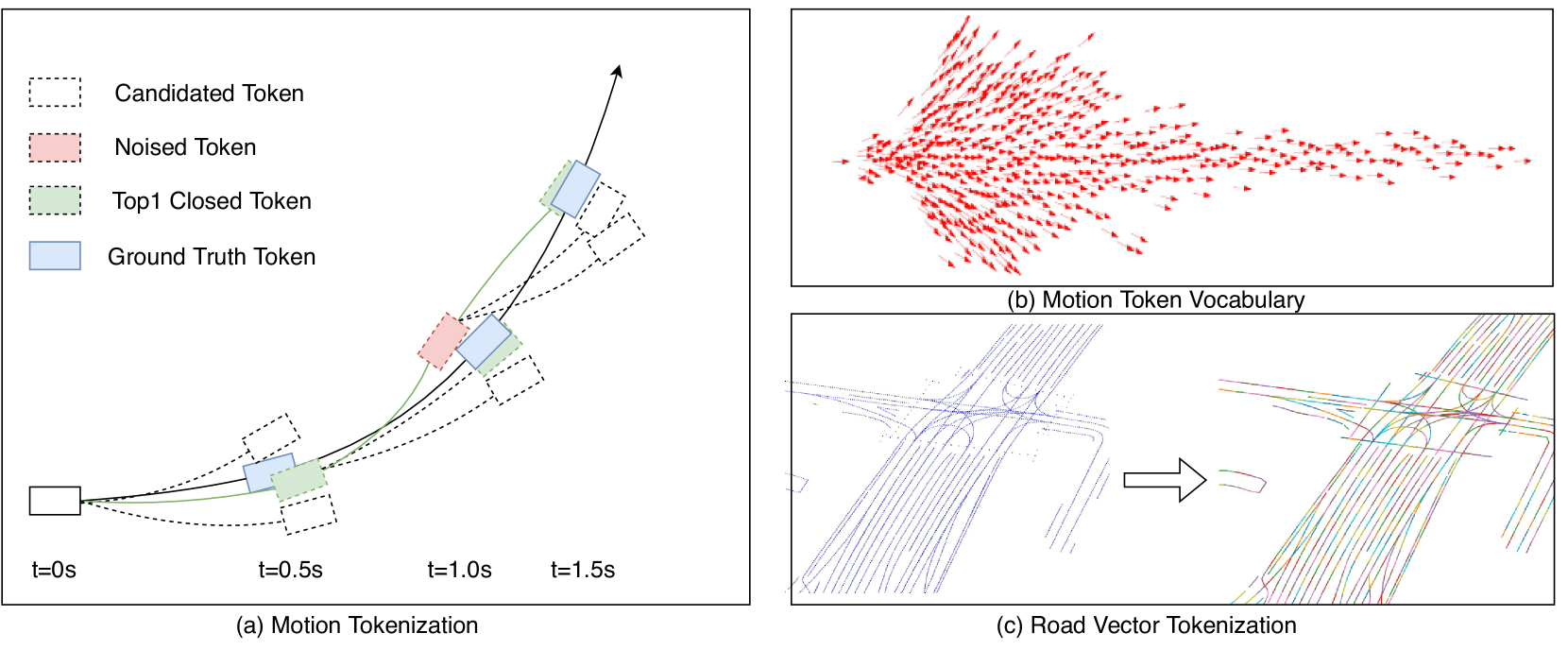
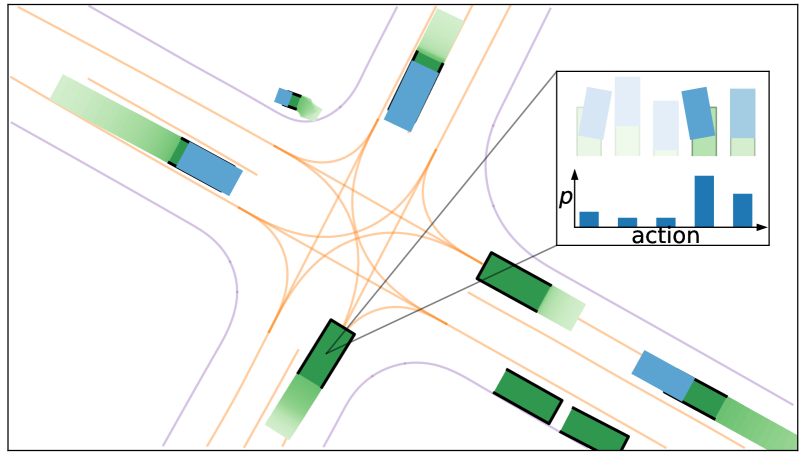
Data-driven autonomous driving motion generation tasks are frequently impacted by the limitations of dataset size and the domain gap between datasets, which precludes their extensive application in real-world scenarios. To address this issue, we introduce SMART, a novel autonomous driving motion generation paradigm that models vectorized map and agent trajectory data into discrete sequence tokens. These tokens are then processed through a decoder-only transformer architecture to train for the next token prediction task across spatial-temporal series. This GPT-style method allows the model to learn the motion distribution in real driving scenarios. SMART achieves state-of-the-art performance across most of the metrics on the generative Sim Agents challenge, ranking 1st on the leaderboards of Waymo Open Motion Dataset (WOMD), demonstrating remarkable inference speed. Moreover, SMART represents the generative model in the autonomous driving motion domain, exhibiting zero-shot generalization capabilities: Using only the NuPlan dataset for training and WOMD for validation, SMART achieved a competitive score of 0.71 on the Sim Agents challenge. Lastly, we have collected over 1 billion motion tokens from multiple datasets, validating the model's scalability. These results suggest that SMART has initially emulated two important properties: scalability and zero-shot generalization, and preliminarily meets the needs of large-scale real-time simulation applications. We have released all the code to promote the exploration of models for motion generation in the autonomous driving field.
Read more5/27/2024
0
Trajeglish: Traffic Modeling as Next-Token Prediction
Jonah Philion, Xue Bin Peng, Sanja Fidler
A longstanding challenge for self-driving development is simulating dynamic driving scenarios seeded from recorded driving logs. In pursuit of this functionality, we apply tools from discrete sequence modeling to model how vehicles, pedestrians and cyclists interact in driving scenarios. Using a simple data-driven tokenization scheme, we discretize trajectories to centimeter-level resolution using a small vocabulary. We then model the multi-agent sequence of discrete motion tokens with a GPT-like encoder-decoder that is autoregressive in time and takes into account intra-timestep interaction between agents. Scenarios sampled from our model exhibit state-of-the-art realism; our model tops the Waymo Sim Agents Benchmark, surpassing prior work along the realism meta metric by 3.3% and along the interaction metric by 9.9%. We ablate our modeling choices in full autonomy and partial autonomy settings, and show that the representations learned by our model can quickly be adapted to improve performance on nuScenes. We additionally evaluate the scalability of our model with respect to parameter count and dataset size, and use density estimates from our model to quantify the saliency of context length and intra-timestep interaction for the traffic modeling task.
Read more4/16/2024
0
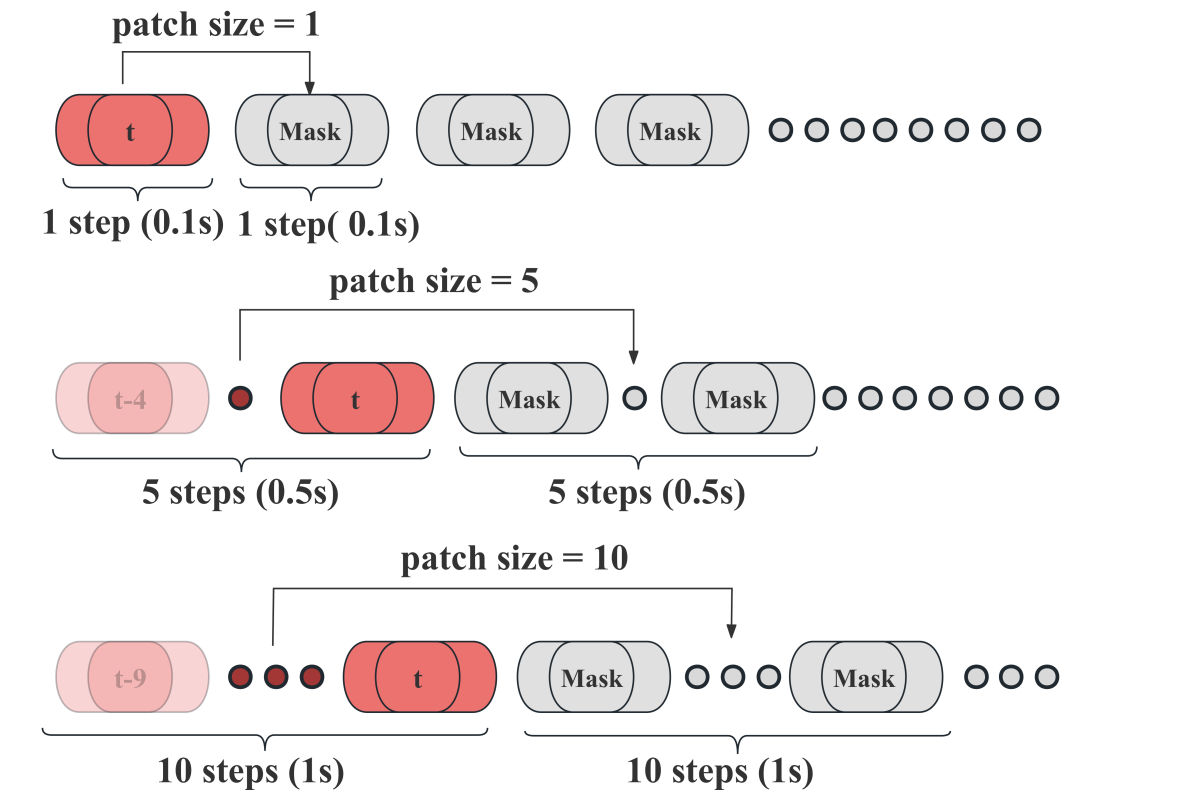
BehaviorGPT: Smart Agent Simulation for Autonomous Driving with Next-Patch Prediction
Zikang Zhou, Haibo Hu, Xinhong Chen, Jianping Wang, Nan Guan, Kui Wu, Yung-Hui Li, Yu-Kai Huang, Chun Jason Xue
Simulating realistic interactions among traffic agents is crucial for efficiently validating the safety of autonomous driving systems. Existing leading simulators primarily use an encoder-decoder structure to encode the historical trajectories for future simulation. However, such a paradigm complicates the model architecture, and the manual separation of history and future trajectories leads to low data utilization. To address these challenges, we propose Behavior Generative Pre-trained Transformers (BehaviorGPT), a decoder-only, autoregressive architecture designed to simulate the sequential motion of multiple agents. Crucially, our approach discards the traditional separation between history and future, treating each time step as the current one, resulting in a simpler, more parameter- and data-efficient design that scales seamlessly with data and computation. Additionally, we introduce the Next-Patch Prediction Paradigm (NP3), which enables models to reason at the patch level of trajectories and capture long-range spatial-temporal interactions. BehaviorGPT ranks first across several metrics on the Waymo Sim Agents Benchmark, demonstrating its exceptional performance in multi-agent and agent-map interactions. We outperformed state-of-the-art models with a realism score of 0.741 and improved the minADE metric to 1.540, with an approximately 91.6% reduction in model parameters.
Read more5/28/2024

0
Solving Motion Planning Tasks with a Scalable Generative Model
Yihan Hu, Siqi Chai, Zhening Yang, Jingyu Qian, Kun Li, Wenxin Shao, Haichao Zhang, Wei Xu, Qiang Liu
As autonomous driving systems being deployed to millions of vehicles, there is a pressing need of improving the system's scalability, safety and reducing the engineering cost. A realistic, scalable, and practical simulator of the driving world is highly desired. In this paper, we present an efficient solution based on generative models which learns the dynamics of the driving scenes. With this model, we can not only simulate the diverse futures of a given driving scenario but also generate a variety of driving scenarios conditioned on various prompts. Our innovative design allows the model to operate in both full-Autoregressive and partial-Autoregressive modes, significantly improving inference and training speed without sacrificing generative capability. This efficiency makes it ideal for being used as an online reactive environment for reinforcement learning, an evaluator for planning policies, and a high-fidelity simulator for testing. We evaluated our model against two real-world datasets: the Waymo motion dataset and the nuPlan dataset. On the simulation realism and scene generation benchmark, our model achieves the state-of-the-art performance. And in the planning benchmarks, our planner outperforms the prior arts. We conclude that the proposed generative model may serve as a foundation for a variety of motion planning tasks, including data generation, simulation, planning, and online training. Source code is public at https://github.com/HorizonRobotics/GUMP/
Read more7/4/2024