Towards Using Fast Embedded Model Predictive Control for Human-Aware Predictive Robot Navigation
2405.12616
0
0
📈
Abstract
Predictive planning is a key capability for robots to efficiently and safely navigate populated environments. Particularly in densely crowded scenes, with uncertain human motion predictions, predictive path planning, and control can become expensive to compute in real time due to the curse of dimensionality. With the goal of achieving pro-active and legible robot motion in shared environments, in this paper we present HuMAN-MPC, a computationally efficient algorithm for Human Motion Aware Navigation using fast embedded Model Predictive Control. The approach consists of a novel model predictive control (MPC) formulation that leverages a fast state-of-the-art optimization backend based on a sequential quadratic programming real-time iteration scheme while also providing feasibility monitoring. Our experiments, in simulation and on a fully integrated ROS-based platform, show that the approach achieves great scalability with fast computation times without penalizing path quality and efficiency of the resulting avoidance behavior.
Create account to get full access
Overview
- This paper presents an algorithm called HuMAN-MPC for efficient and safe robot navigation in crowded environments.
- The approach uses a novel model predictive control (MPC) formulation that leverages a fast optimization backend to enable real-time computation.
- Experiments in simulation and on a real robot platform show the approach achieves fast computation times without compromising path quality or avoidance behavior.
Plain English Explanation
The paper describes an algorithm called HuMAN-MPC that helps robots navigate crowded environments more efficiently and safely. In busy, unpredictable scenes with lots of people moving around, it can be computationally expensive for robots to plan their paths in real-time and avoid collisions.
The key idea behind HuMAN-MPC is to use a type of control algorithm called model predictive control (MPC) that can quickly compute the robot's optimal path while also accounting for the predicted motion of nearby people. This allows the robot to be proactive and "legible" in its movements, meaning it moves in a way that is easy for people to understand and anticipate.
The researchers developed a novel MPC formulation that uses a fast optimization method, allowing the robot to plan its path very quickly without sacrificing the quality or efficiency of its resulting motion. Through experiments in simulation and on a real robot, they showed that HuMAN-MPC can navigate crowded spaces effectively while maintaining fast computation times.
Technical Explanation
The paper presents the HuMAN-MPC algorithm, which uses a novel model predictive control (MPC) formulation to enable efficient and safe robot navigation in crowded environments. The approach leverages a fast state-of-the-art optimization backend based on a sequential quadratic programming real-time iteration scheme, while also providing feasibility monitoring.
The key innovation is the MPC formulation that can quickly compute the robot's optimal path while accounting for predicted human motion, enabling the robot to navigate in a "proactive and legible" manner. This is important in densely crowded scenes with uncertain human motion predictions, where traditional path planning and control can become computationally expensive due to the "curse of dimensionality."
The authors' experiments, conducted in simulation and on a fully integrated ROS-based platform, demonstrate that HuMAN-MPC achieves great scalability with fast computation times without penalizing path quality or the efficiency of the resulting avoidance behavior. This is enabled by the efficient neural network planner used in the MPC formulation.
Critical Analysis
The paper presents a compelling approach to the important problem of enabling robots to navigate safely and efficiently in crowded environments. The novel MPC formulation and use of fast optimization techniques are well-justified and the experimental results are promising.
However, the paper does not address several potential limitations and areas for further research. For example, the approach assumes the ability to accurately predict human motion, which can be challenging in practice. Additionally, the experiments were conducted in relatively simple, controlled environments, and it's unclear how well the approach would scale to more complex, real-world settings.
Further research could also explore how HuMAN-MPC might be combined with other techniques, such as learning-based motion planning or actor-critic control, to further improve its performance and robustness. Evaluating the approach on a wider range of scenarios and with more diverse human behaviors would also be valuable.
Conclusion
The HuMAN-MPC algorithm presented in this paper represents an important step towards enabling robots to navigate efficiently and safely in crowded, dynamic environments. By combining a novel MPC formulation with a fast optimization backend, the approach can compute optimal paths in real-time while accounting for predicted human motion.
The promising results in simulation and on a real robot platform suggest that HuMAN-MPC could have significant implications for the development of robots that can seamlessly and intelligently interact with people in shared spaces, such as hospitals, shopping malls, or urban settings. Further research to address the identified limitations and explore potential synergies with other techniques could help unlock even more capabilities for this type of robot navigation system.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Embedded Hierarchical MPC for Autonomous Navigation
Dennis Benders, Johannes Kohler, Thijs Niesten, Robert Babuv{s}ka, Javier Alonso-Mora, Laura Ferranti
0
0
To efficiently deploy robotic systems in society, mobile robots need to autonomously and safely move through complex environments. Nonlinear model predictive control (MPC) methods provide a natural way to find a dynamically feasible trajectory through the environment without colliding with nearby obstacles. However, the limited computation power available on typical embedded robotic systems, such as quadrotors, poses a challenge to running MPC in real-time, including its most expensive tasks: constraints generation and optimization. To address this problem, we propose a novel hierarchical MPC scheme that interconnects a planning and a tracking layer. The planner constructs a trajectory with a long prediction horizon at a slow rate, while the tracker ensures trajectory tracking at a relatively fast rate. We prove that the proposed framework avoids collisions and is recursively feasible. Furthermore, we demonstrate its effectiveness in simulations and lab experiments with a quadrotor that needs to reach a goal position in a complex static environment. The code is efficiently implemented on the quadrotor's embedded computer to ensure real-time feasibility. Compared to a state-of-the-art single-layer MPC formulation, this allows us to increase the planning horizon by a factor of 5, which results in significantly better performance.
6/18/2024
Integrating Uncertainty-Aware Human Motion Prediction into Graph-Based Manipulator Motion Planning
Wansong Liu, Kareem Eltouny, Sibo Tian, Xiao Liang, Minghui Zheng
0
0
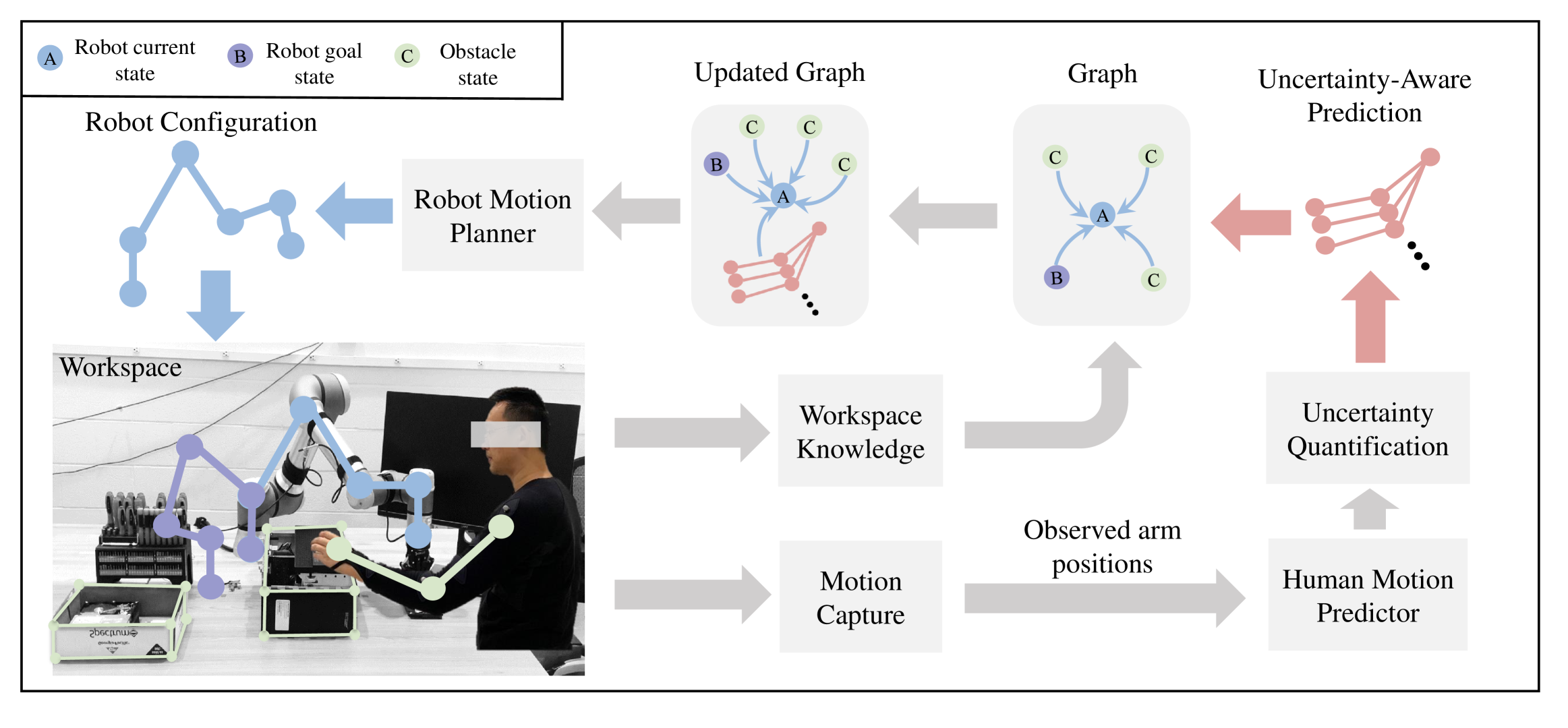
There has been a growing utilization of industrial robots as complementary collaborators for human workers in re-manufacturing sites. Such a human-robot collaboration (HRC) aims to assist human workers in improving the flexibility and efficiency of labor-intensive tasks. In this paper, we propose a human-aware motion planning framework for HRC to effectively compute collision-free motions for manipulators when conducting collaborative tasks with humans. We employ a neural human motion prediction model to enable proactive planning for manipulators. Particularly, rather than blindly trusting and utilizing predicted human trajectories in the manipulator planning, we quantify uncertainties of the neural prediction model to further ensure human safety. Moreover, we integrate the uncertainty-aware prediction into a graph that captures key workspace elements and illustrates their interconnections. Then a graph neural network is leveraged to operate on the constructed graph. Consequently, robot motion planning considers both the dependencies among all the elements in the workspace and the potential influence of future movements of human workers. We experimentally validate the proposed planning framework using a 6-degree-of-freedom manipulator in a shared workspace where a human is performing disassembling tasks. The results demonstrate the benefits of our approach in terms of improving the smoothness and safety of HRC. A brief video introduction of this work is available as the supplemental materials.
5/17/2024
📈
SICNav: Safe and Interactive Crowd Navigation using Model Predictive Control and Bilevel Optimization
Sepehr Samavi, James R. Han, Florian Shkurti, Angela P. Schoellig
0
0
Robots need to predict and react to human motions to navigate through a crowd without collisions. Many existing methods decouple prediction from planning, which does not account for the interaction between robot and human motions and can lead to the robot getting stuck. We propose SICNav, a Model Predictive Control (MPC) method that jointly solves for robot motion and predicted crowd motion in closed-loop. We model each human in the crowd to be following an Optimal Reciprocal Collision Avoidance (ORCA) scheme and embed that model as a constraint in the robot's local planner, resulting in a bilevel nonlinear MPC optimization problem. We use a KKT-reformulation to cast the bilevel problem as a single level and use a nonlinear solver to optimize. Our MPC method can influence pedestrian motion while explicitly satisfying safety constraints in a single-robot multi-human environment. We analyze the performance of SICNav in two simulation environments and indoor experiments with a real robot to demonstrate safe robot motion that can influence the surrounding humans. We also validate the trajectory forecasting performance of ORCA on a human trajectory dataset.
5/29/2024
➖
Socially-Aware Shared Control Navigation for Assistive Mobile Robots in the Built Environment
Yifan Xu, Qianwei Wang, Vineet Kamat, Carol Menassa
0
0
As the number of Persons with Disabilities (PWD), particularly those with one or more physical impairments, increases, there is an increasing demand for assistive robotic technologies that can support independent mobility in the built environment and reduce the burden on caregivers. Current assistive mobility platforms (e.g., robotic wheelchairs) often fail to incorporate user preferences and control, leading to reduced trust and efficiency. Existing shared control algorithms do not allow the incorporation of the user control preferences inside the navigation framework or the path planning algorithm. In addition, existing dynamic local planner algorithms for robotic wheelchairs do not take into account the social spaces of people, potentially leading such platforms to infringe upon these areas and cause discomfort. To address these concerns, this work introduces a novel socially-aware shared autonomy-based navigation system for assistive mobile robotic platforms. Our navigation framework comprises a Global Planner and a Local Planner. To implement the Global Planner, the proposed approach introduces a novel User Preference Field (UPF) theory within its global planning framework, explicitly acknowledging user preferences to adeptly navigate away from congested areas. For the Local Planner, we propose a Socially-aware Shared Control-based Model Predictive Control with Dynamic Control Barrier Function (SS-MPC-DCBF) to adjust movements in real-time, integrating user preferences for safer, more autonomous navigation. Evaluation results show that our Global Planner aligns closely with user preferences compared to baselines, and our Local Planner demonstrates enhanced safety and efficiency in dynamic and static scenarios. This integrated approach fosters trust and autonomy, crucial for the acceptance of assistive mobility technologies in the built environment.
5/28/2024