Soar: Design and Deployment of A Smart Roadside Infrastructure System for Autonomous Driving

0

Sign in to get full access
Overview
- This paper proposes "Soar", a smart roadside infrastructure system designed to assist autonomous driving by providing real-time data and computing capabilities.
- The system leverages edge computing and vehicle-to-everything (V2X) communication to enable collaborative autonomous driving.
- The authors describe the design, implementation, and deployment of the Soar system, including its architecture, key components, and evaluation.
Plain English Explanation
The paper introduces a new technology called "Soar" that is designed to help self-driving cars operate more safely and effectively. Soar is a system of smart infrastructure - things like cameras, sensors, and computers - that are installed along roads and highways. These Soar components can communicate directly with self-driving cars, providing them with important real-time information about traffic, road conditions, obstacles, and other factors.
This communication between the Soar infrastructure and the self-driving cars enables a collaborative approach to autonomous driving. The cars can rely on the Soar system to supplement their own onboard sensors and processing power, giving them a more comprehensive understanding of their surroundings. The Soar system essentially acts as an assistant to the self-driving cars, helping them navigate more safely and efficiently.
The paper outlines the specific design and architecture of the Soar system, detailing how the various hardware and software components work together. It also describes the process of deploying Soar in a real-world setting and evaluating its performance. Overall, the goal of Soar is to advance the state of autonomous driving technology by leveraging smart infrastructure to enhance the capabilities of self-driving cars.
Technical Explanation
The paper introduces a smart roadside infrastructure system called "Soar" that is designed to assist autonomous driving. Soar leverages edge computing and vehicle-to-everything (V2X) communication to enable collaborative autonomous driving.
The Soar system architecture consists of three key components: roadside units (RSUs), on-board units (OBUs), and a backend server. The RSUs are installed along the roads and equipped with sensors, cameras, and edge computing capabilities. The OBUs are installed in autonomous vehicles and handle local perception and control. The backend server manages the overall system and coordinates the communication between the RSUs and OBUs.
Through V2X communication, the Soar system allows autonomous vehicles to receive real-time data and offload computation to the edge infrastructure. This collaborative approach enhances the vehicles' situational awareness and decision-making capabilities, addressing the challenges faced by autonomous driving on a small scale and overcoming the end-to-end autonomous driving challenges.
The paper presents the design, implementation, and deployment of the Soar system, including its hardware and software components, communication protocols, and system management. The authors also conduct a comprehensive evaluation of the Soar system, measuring its performance, latency, and the benefits it provides to autonomous driving.
Critical Analysis
The paper provides a detailed description of the Soar system and its potential to enhance autonomous driving capabilities. However, the authors acknowledge several limitations and areas for further research:
-
The current Soar deployment is limited to a specific geographic area, and the authors note the need to evaluate the system's scalability and adaptability to different road networks and environments.
-
The paper does not extensively explore the security and privacy implications of the Soar system, which is an important consideration for widespread adoption of such infrastructure-assisted autonomous driving technologies.
-
The authors suggest investigating more advanced algorithms and techniques for cooperative decision-making between the Soar infrastructure and autonomous vehicles, as the current approach may not be optimal in all scenarios.
-
The economic feasibility and cost-effectiveness of deploying and maintaining the Soar system at scale are not thoroughly addressed, which could be a significant barrier to its widespread adoption.
Overall, the Soar system represents an important step towards collaborative autonomous driving, but further research is needed to address the identified limitations and ensure the system's long-term viability and scalability.
Conclusion
The Soar system proposed in this paper demonstrates the potential of smart roadside infrastructure to enhance the capabilities of autonomous driving. By leveraging edge computing and V2X communication, Soar enables a collaborative approach that can improve the situational awareness and decision-making of self-driving cars.
The detailed design, implementation, and evaluation of the Soar system provide valuable insights into the technical challenges and opportunities in this area. While the current deployment is limited, the research highlights the promise of infrastructure-assisted autonomous driving and the need for further advancements to address scalability, security, and cost-effectiveness concerns.
As autonomous driving technology continues to evolve, the Soar system and similar approaches to smart infrastructure integration could play a crucial role in unlocking the full potential of self-driving cars and improving the safety and efficiency of transportation systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Soar: Design and Deployment of A Smart Roadside Infrastructure System for Autonomous Driving
Shuyao Shi, Neiwen Ling, Zhehao Jiang, Xuan Huang, Yuze He, Xiaoguang Zhao, Bufang Yang, Chen Bian, Jingfei Xia, Zhenyu Yan, Raymond Yeung, Guoliang Xing
Recently,smart roadside infrastructure (SRI) has demonstrated the potential of achieving fully autonomous driving systems. To explore the potential of infrastructure-assisted autonomous driving, this paper presents the design and deployment of Soar, the first end-to-end SRI system specifically designed to support autonomous driving systems. Soar consists of both software and hardware components carefully designed to overcome various system and physical challenges. Soar can leverage the existing operational infrastructure like street lampposts for a lower barrier of adoption. Soar adopts a new communication architecture that comprises a bi-directional multi-hop I2I network and a downlink I2V broadcast service, which are designed based on off-the-shelf 802.11ac interfaces in an integrated manner. Soar also features a hierarchical DL task management framework to achieve desirable load balancing among nodes and enable them to collaborate efficiently to run multiple data-intensive autonomous driving applications. We deployed a total of 18 Soar nodes on existing lampposts on campus, which have been operational for over two years. Our real-world evaluation shows that Soar can support a diverse set of autonomous driving applications and achieve desirable real-time performance and high communication reliability. Our findings and experiences in this work offer key insights into the development and deployment of next-generation smart roadside infrastructure and autonomous driving systems.
Read more4/23/2024

0
SOAR: Simultaneous Exploration and Photographing with Heterogeneous UAVs for Fast Autonomous Reconstruction
Mingjie Zhang, Chen Feng, Zengzhi Li, Guiyong Zheng, Yiming Luo, Zhu Wang, Jinni Zhou, Shaojie Shen, Boyu Zhou
Unmanned Aerial Vehicles (UAVs) have gained significant popularity in scene reconstruction. This paper presents SOAR, a LiDAR-Visual heterogeneous multi-UAV system specifically designed for fast autonomous reconstruction of complex environments. Our system comprises a LiDAR-equipped explorer with a large field-of-view (FoV), alongside photographers equipped with cameras. To ensure rapid acquisition of the scene's surface geometry, we employ a surface frontier-based exploration strategy for the explorer. As the surface is progressively explored, we identify the uncovered areas and generate viewpoints incrementally. These viewpoints are then assigned to photographers through solving a Consistent Multiple Depot Multiple Traveling Salesman Problem (Consistent-MDMTSP), which optimizes scanning efficiency while ensuring task consistency. Finally, photographers utilize the assigned viewpoints to determine optimal coverage paths for acquiring images. We present extensive benchmarks in the realistic simulator, which validates the performance of SOAR compared with classical and state-of-the-art methods. For more details, please see our project page at https://sysu-star.github.io/SOAR}{sysu-star.github.io/SOAR.
Read more9/5/2024

0
Intelligent Routing as a Service (iRaaS)
Saptarshi Ghosh, Konstantinos Antonakoglou, Ioannis Mavromatis, Kostas Katsaros
The scope of the Sixth-Generation Self-Organized Networks (6G-SON) advances its predecessor's capability towards agility, flexibility, and adaptability. On-demand overlay networking technologies have shown a prominent maturity while coping with the rising complexity and scale of enterprise, service provider, and data centre networks. The Software-Defined Networking paradigm has recently offered Model Driven Programmability, minimizing network management complexity through automation and orchestration. However, leveraging Machine Learning-driven network optimization, a.k.a. Knowledge-Defined Networking (KDN), has still been a domain of interest for the Network Softwarization research community. In this article, we propose Intelligent Routing as a Service (iRaaS) architecture as an application layer cognitive routing framework for KDNs. iRaaS offers routing logic customization (i.e., customizing metric function and path-finding algorithm) and provides an option to include heuristic parameters from trained models as a part of the metric calculation. iRaaS sits on the application plane above the knowledge plane in a KDN stack, thus providing platform- and vendor-agnostic coupling with existing network infrastructures. This article covers the scope of iRaaS by using reliability as a heuristic for standard path-discovery algorithms, e.g., Shortest Path First (SPF) and Diffusion Update algorithm (DUAL), along with the architectural specification. We validate our approach through a Proof-of-Concept deployment.
Read more7/9/2024
0
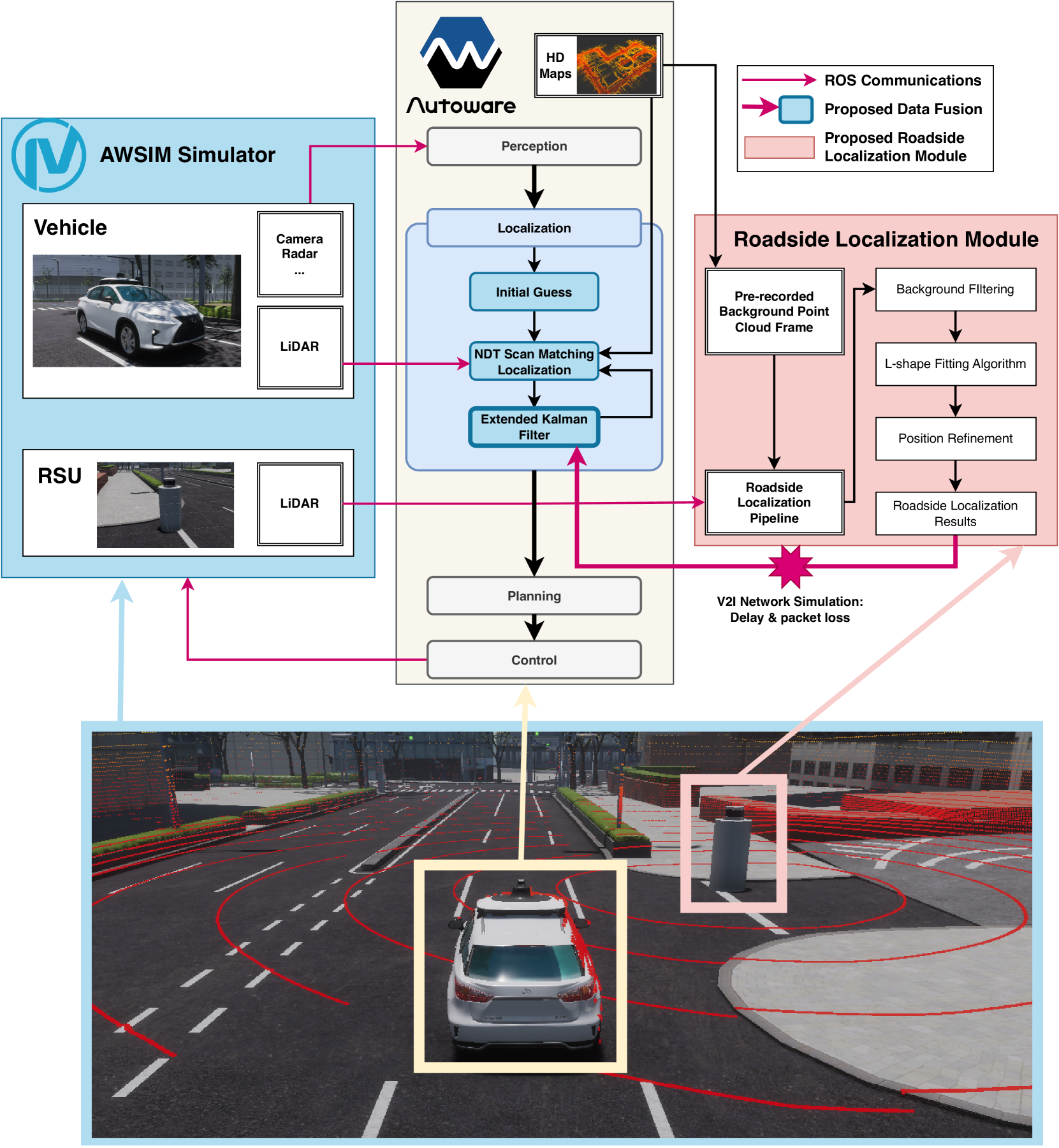
Accurate Cooperative Localization Utilizing LiDAR-equipped Roadside Infrastructure for Autonomous Driving
Yuze Jiang, Ehsan Javanmardi, Manabu Tsukada, Hiroshi Esaki
Recent advancements in LiDAR technology have significantly lowered costs and improved both its precision and resolution, thereby solidifying its role as a critical component in autonomous vehicle localization. Using sophisticated 3D registration algorithms, LiDAR now facilitates vehicle localization with centimeter-level accuracy. However, these high-precision techniques often face reliability challenges in environments devoid of identifiable map features. To address this limitation, we propose a novel approach that utilizes road side units (RSU) with vehicle-to-infrastructure (V2I) communications to assist vehicle self-localization. By using RSUs as stationary reference points and processing real-time LiDAR data, our method enhances localization accuracy through a cooperative localization framework. By placing RSUs in critical areas, our proposed method can improve the reliability and precision of vehicle localization when the traditional vehicle self-localization technique falls short. Evaluation results in an end-to-end autonomous driving simulator AWSIM show that the proposed method can improve localization accuracy by up to 80% under vulnerable environments compared to traditional localization methods. Additionally, our method also demonstrates robust resistance to network delays and packet loss in heterogeneous network environments.
Read more7/12/2024