Socially Adaptive Path Planning Based on Generative Adversarial Network
2404.18687
0
0
🌐
Abstract
The natural interaction between robots and pedestrians in the process of autonomous navigation is crucial for the intelligent development of mobile robots, which requires robots to fully consider social rules and guarantee the psychological comfort of pedestrians. Among the research results in the field of robotic path planning, the learning-based socially adaptive algorithms have performed well in some specific human-robot interaction environments. However, human-robot interaction scenarios are diverse and constantly changing in daily life, and the generalization of robot socially adaptive path planning remains to be further investigated. In order to address this issue, this work proposes a new socially adaptive path planning algorithm by combining the generative adversarial network (GAN) with the Optimal Rapidly-exploring Random Tree (RRT*) navigation algorithm. Firstly, a GAN model with strong generalization performance is proposed to adapt the navigation algorithm to more scenarios. Secondly, a GAN model based Optimal Rapidly-exploring Random Tree navigation algorithm (GAN-RRT*) is proposed to generate paths in human-robot interaction environments. Finally, we propose a socially adaptive path planning framework named GAN-RTIRL, which combines the GAN model with Rapidly-exploring random Trees Inverse Reinforcement Learning (RTIRL) to improve the homotopy rate between planned and demonstration paths. In the GAN-RTIRL framework, the GAN-RRT* path planner can update the GAN model from the demonstration path. In this way, the robot can generate more anthropomorphic paths in human-robot interaction environments and has stronger generalization in more complex environments. Experimental results reveal that our proposed method can effectively improve the anthropomorphic degree of robot motion planning and the homotopy rate between planned and demonstration paths.
Create account to get full access
Overview
- Proposes a new socially adaptive path planning algorithm that combines generative adversarial networks (GANs) with the Optimal Rapidly-exploring Random Tree (RRT*) navigation algorithm
- Aims to address the challenge of generalizing robot socially adaptive path planning to diverse and changing human-robot interaction scenarios
- Introduces a GAN-based Optimal Rapidly-exploring Random Tree navigation algorithm (GAN-RRT*) and a socially adaptive path planning framework named GAN-RTIRL
Plain English Explanation
The paper focuses on improving the interaction between robots and pedestrians during autonomous navigation. This is crucial for the intelligent development of mobile robots, as they need to consider social rules and ensure the psychological comfort of pedestrians.
The researchers propose a new algorithm that combines generative adversarial networks (GANs) with the Optimal Rapidly-exploring Random Tree (RRT*) navigation algorithm. The GAN model helps the robot adapt its navigation to a wider range of human-robot interaction scenarios, which can be diverse and constantly changing in daily life.
The GAN-RRT* algorithm generates paths that are more socially acceptable and comfortable for pedestrians, by learning from demonstrations of desirable paths. The researchers also introduce the GAN-RTIRL framework, which further improves the similarity between the robot's planned paths and the demonstration paths, making the robot's navigation more "human-like."
The experimental results show that the proposed method can effectively improve the social adaptability of the robot's motion planning and the similarity between the planned and demonstration paths.
Technical Explanation
The paper proposes a new socially adaptive path planning algorithm that combines a generative adversarial network (GAN) with the Optimal Rapidly-exploring Random Tree (RRT*) navigation algorithm.
The researchers first develop a GAN model with strong generalization performance to adapt the navigation algorithm to a wider range of human-robot interaction scenarios. They then propose the GAN-RRT* algorithm, which uses the GAN model to generate paths in human-robot interaction environments.
Additionally, the researchers introduce the GAN-RTIRL framework, which combines the GAN model with Rapidly-exploring random Trees Inverse Reinforcement Learning (RTIRL) to improve the similarity between the planned paths and the demonstration paths. This allows the robot to generate more "anthropomorphic" paths that are closer to how humans would navigate in those environments.
The experiments demonstrate that the proposed method can effectively improve the social adaptability of the robot's motion planning and the homotopy rate (similarity) between the planned and demonstration paths.
Critical Analysis
The paper addresses an important challenge in the field of robot navigation, namely, improving the interaction between robots and pedestrians in diverse and changing real-world environments. The proposed approach, which combines GAN and RRT* algorithms, shows promising results in generating more socially acceptable robot paths.
However, the paper does not provide a detailed analysis of the limitations or potential issues with the proposed method. For example, it would be interesting to understand how the GAN-RTIRL framework performs in scenarios with a large number of pedestrians or in highly dynamic environments. Additionally, the paper could have discussed the computational complexity of the proposed algorithms and their potential impact on the real-time performance of the robot's navigation system.
Furthermore, the paper could have compared the proposed method to other state-of-the-art approaches in socially adaptive robot navigation, such as social force models or deep reinforcement learning-based methods. This could have provided a more comprehensive evaluation of the strengths and weaknesses of the proposed algorithm.
Conclusion
The paper presents a novel socially adaptive path planning algorithm that combines GAN and RRT* techniques to improve the interaction between robots and pedestrians during autonomous navigation. The proposed approach shows promising results in generating paths that are more socially acceptable and similar to human demonstration paths.
The research highlights the importance of considering social rules and pedestrian comfort in the intelligent development of mobile robots. The GAN-RTIRL framework, in particular, offers a promising direction for further research in this area, as it aims to bridge the gap between robot navigation and human-like path planning.
Overall, this work contributes to the ongoing efforts to create more socially aware and user-friendly autonomous systems, which will be crucial as robots become increasingly integrated into our daily lives.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Adaptive Social Force Window Planner with Reinforcement Learning
Mauro Martini, No'e P'erez-Higueras, Andrea Ostuni, Marcello Chiaberge, Fernando Caballero, Luis Merino
0
0
Human-aware navigation is a complex task for mobile robots, requiring an autonomous navigation system capable of achieving efficient path planning together with socially compliant behaviors. Social planners usually add costs or constraints to the objective function, leading to intricate tuning processes or tailoring the solution to the specific social scenario. Machine Learning can enhance planners' versatility and help them learn complex social behaviors from data. This work proposes an adaptive social planner, using a Deep Reinforcement Learning agent to dynamically adjust the weighting parameters of the cost function used to evaluate trajectories. The resulting planner combines the robustness of the classic Dynamic Window Approach, integrated with a social cost based on the Social Force Model, and the flexibility of learning methods to boost the overall performance on social navigation tasks. Our extensive experimentation on different environments demonstrates the general advantage of the proposed method over static cost planners.
4/23/2024
Structured Graph Network for Constrained Robot Crowd Navigation with Low Fidelity Simulation
Shuijing Liu, Kaiwen Hong, Neeloy Chakraborty, Katherine Driggs-Campbell
0
0
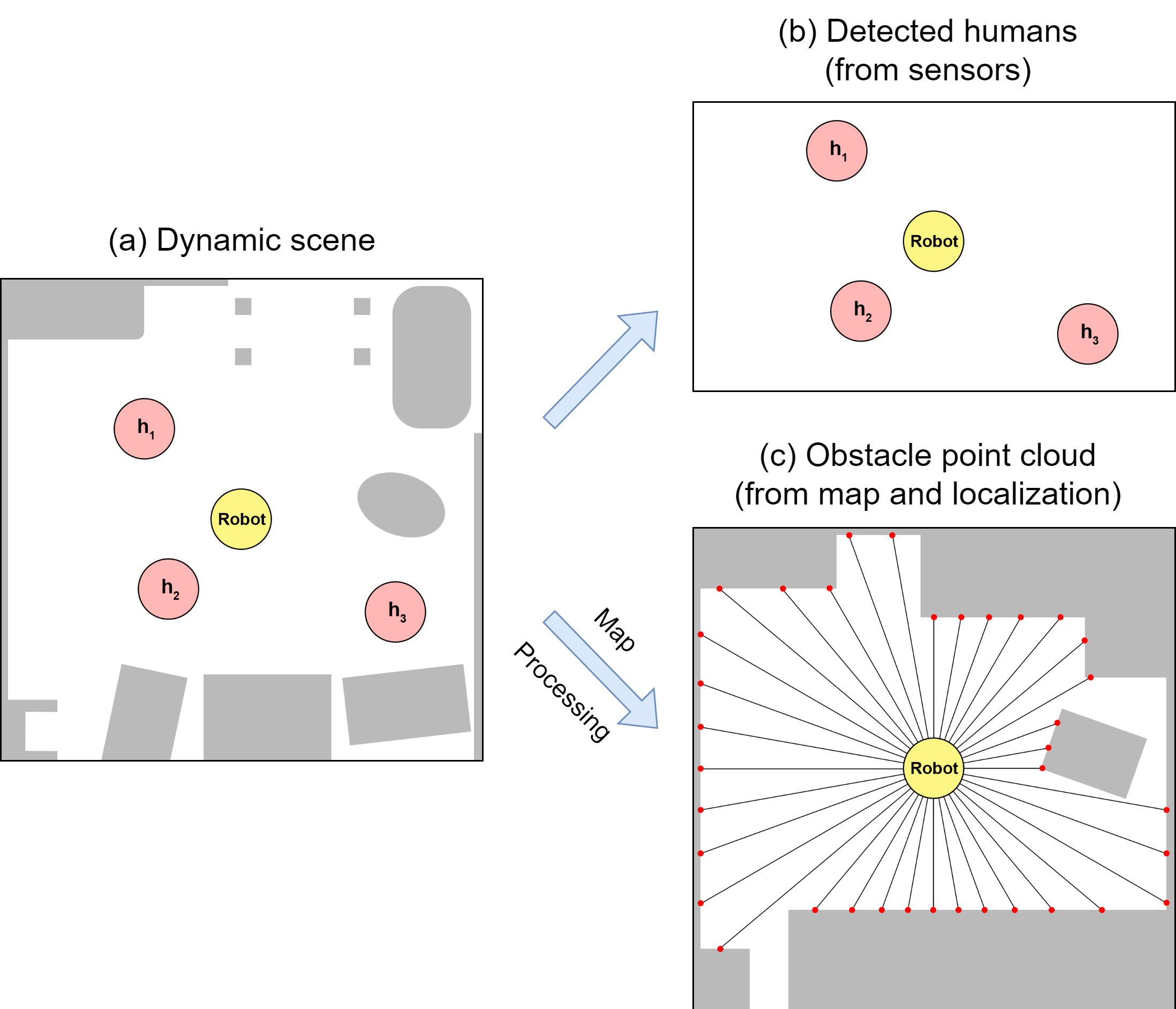
We investigate the feasibility of deploying reinforcement learning (RL) policies for constrained crowd navigation using a low-fidelity simulator. We introduce a representation of the dynamic environment, separating human and obstacle representations. Humans are represented through detected states, while obstacles are represented as computed point clouds based on maps and robot localization. This representation enables RL policies trained in a low-fidelity simulator to deploy in real world with a reduced sim2real gap. Additionally, we propose a spatio-temporal graph to model the interactions between agents and obstacles. Based on the graph, we use attention mechanisms to capture the robot-human, human-human, and human-obstacle interactions. Our method significantly improves navigation performance in both simulated and real-world environments. Video demonstrations can be found at https://sites.google.com/view/constrained-crowdnav/home.
5/29/2024

GenAD: Generative End-to-End Autonomous Driving
Wenzhao Zheng, Ruiqi Song, Xianda Guo, Chenming Zhang, Long Chen
0
0
Directly producing planning results from raw sensors has been a long-desired solution for autonomous driving and has attracted increasing attention recently. Most existing end-to-end autonomous driving methods factorize this problem into perception, motion prediction, and planning. However, we argue that the conventional progressive pipeline still cannot comprehensively model the entire traffic evolution process, e.g., the future interaction between the ego car and other traffic participants and the structural trajectory prior. In this paper, we explore a new paradigm for end-to-end autonomous driving, where the key is to predict how the ego car and the surroundings evolve given past scenes. We propose GenAD, a generative framework that casts autonomous driving into a generative modeling problem. We propose an instance-centric scene tokenizer that first transforms the surrounding scenes into map-aware instance tokens. We then employ a variational autoencoder to learn the future trajectory distribution in a structural latent space for trajectory prior modeling. We further adopt a temporal model to capture the agent and ego movements in the latent space to generate more effective future trajectories. GenAD finally simultaneously performs motion prediction and planning by sampling distributions in the learned structural latent space conditioned on the instance tokens and using the learned temporal model to generate futures. Extensive experiments on the widely used nuScenes benchmark show that the proposed GenAD achieves state-of-the-art performance on vision-centric end-to-end autonomous driving with high efficiency. Code: https://github.com/wzzheng/GenAD.
4/9/2024

SHINE: Social Homology Identification for Navigation in Crowded Environments
Diego Martinez-Baselga, Oscar de Groot, Luzia Knoedler, Luis Riazuelo, Javier Alonso-Mora, Luis Montano
0
0
Navigating mobile robots in social environments remains a challenging task due to the intricacies of human-robot interactions. Most of the motion planners designed for crowded and dynamic environments focus on choosing the best velocity to reach the goal while avoiding collisions, but do not explicitly consider the high-level navigation behavior (avoiding through the left or right side, letting others pass or passing before others, etc.). In this work, we present a novel motion planner that incorporates topology distinct paths representing diverse navigation strategies around humans. The planner selects the topology class that imitates human behavior the best using a deep neural network model trained on real-world human motion data, ensuring socially intelligent and contextually aware navigation. Our system refines the chosen path through an optimization-based local planner in real time, ensuring seamless adherence to desired social behaviors. In this way, we decouple perception and local planning from the decision-making process. We evaluate the prediction accuracy of the network with real-world data. In addition, we assess the navigation capabilities in both simulation and a real-world platform, comparing it with other state-of-the-art planners. We demonstrate that our planner exhibits socially desirable behaviors and shows a smooth and remarkable performance.
4/26/2024