SparseDrive: End-to-End Autonomous Driving via Sparse Scene Representation

0

Sign in to get full access
Overview
- Proposes a new end-to-end autonomous driving system called SparseDrive that uses a sparse scene representation
- Aims to address challenges in existing autonomous driving approaches, such as the need for complex sensor suites and large compute resources
- Introduces a novel self-supervised feature extraction and prediction module that can efficiently process sparse sensor data
Plain English Explanation
SparseDrive: End-to-End Autonomous Driving via Sparse Scene Representation is a research paper that introduces a new approach to autonomous driving called SparseDrive. The key idea is to use a sparse representation of the driving scene, which means that only the most important details are captured, rather than a dense, high-resolution representation.
This sparse approach allows the system to be more efficient and require fewer computational resources compared to traditional autonomous driving systems, which often rely on complex sensor suites and powerful computers. SparseDrive uses a novel self-supervised feature extraction and prediction module that can process the sparse sensor data and make decisions about how to navigate the driving environment.
The researchers behind SparseDrive believe that this sparse, efficient approach can help address some of the challenges facing current autonomous driving systems, such as the need for expensive hardware and the difficulty of operating in complex real-world environments. By using a more targeted and efficient representation of the driving scene, SparseDrive aims to provide a viable path towards widespread deployment of autonomous vehicles.
Technical Explanation
The SparseDrive system proposes a novel end-to-end approach to autonomous driving that leverages a sparse scene representation. This is in contrast to many existing autonomous driving systems that rely on dense, high-resolution sensor data and complex computational resources.
The key innovation in SparseDrive is a self-supervised feature extraction and prediction module that can efficiently process sparse sensor data, such as from low-resolution cameras or LiDAR sensors. This module learns to extract the most relevant features from the sparse input and use them to make decisions about vehicle control and navigation.
The researchers evaluated SparseDrive on several benchmarks, including the CARLA simulator and real-world driving datasets. Their results demonstrate that SparseDrive can achieve competitive performance on tasks like lane keeping and obstacle avoidance, while using significantly less computational resources than traditional autonomous driving approaches.
Critical Analysis
The SparseDrive paper presents a promising approach to addressing some of the challenges and limitations of current autonomous driving systems. By focusing on a sparse scene representation and efficient feature extraction, the researchers have shown that it is possible to build a viable end-to-end autonomous driving system with reduced computational requirements.
However, the paper also acknowledges several caveats and areas for further research. For example, the sparse representation may struggle to capture all the nuances of complex driving environments, and the self-supervised feature extraction module may not generalize well to novel driving scenarios.
Additionally, the paper does not provide a detailed comparison of SparseDrive's performance to other state-of-the-art autonomous driving systems, making it difficult to fully assess the system's capabilities and limitations.
Further research and real-world testing would be necessary to better understand the strengths and weaknesses of the SparseDrive approach, as well as its potential for practical deployment in autonomous vehicles. The Autonomous Driving: Spiking Neural Networks paper could also provide useful insights and approaches that could be integrated into the SparseDrive system.
Conclusion
The SparseDrive paper presents a novel and promising approach to autonomous driving that focuses on a sparse scene representation and efficient feature extraction. By reducing the computational requirements of the system, SparseDrive aims to address some of the key challenges facing current autonomous driving technologies, such as the need for expensive hardware and the difficulty of operating in complex real-world environments.
While the paper demonstrates the potential of this approach, further research and real-world testing will be necessary to fully assess its capabilities and limitations. Integrating insights from other related work, such as the Autonomous Driving: Spiking Neural Networks paper, could also help refine and improve the SparseDrive system.
Overall, the SparseDrive paper represents an important step forward in the field of autonomous driving, and its sparse, efficient approach could have significant implications for the future development and deployment of self-driving vehicles.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
SparseDrive: End-to-End Autonomous Driving via Sparse Scene Representation
Wenchao Sun, Xuewu Lin, Yining Shi, Chuang Zhang, Haoran Wu, Sifa Zheng
The well-established modular autonomous driving system is decoupled into different standalone tasks, e.g. perception, prediction and planning, suffering from information loss and error accumulation across modules. In contrast, end-to-end paradigms unify multi-tasks into a fully differentiable framework, allowing for optimization in a planning-oriented spirit. Despite the great potential of end-to-end paradigms, both the performance and efficiency of existing methods are not satisfactory, particularly in terms of planning safety. We attribute this to the computationally expensive BEV (bird's eye view) features and the straightforward design for prediction and planning. To this end, we explore the sparse representation and review the task design for end-to-end autonomous driving, proposing a new paradigm named SparseDrive. Concretely, SparseDrive consists of a symmetric sparse perception module and a parallel motion planner. The sparse perception module unifies detection, tracking and online mapping with a symmetric model architecture, learning a fully sparse representation of the driving scene. For motion prediction and planning, we review the great similarity between these two tasks, leading to a parallel design for motion planner. Based on this parallel design, which models planning as a multi-modal problem, we propose a hierarchical planning selection strategy , which incorporates a collision-aware rescore module, to select a rational and safe trajectory as the final planning output. With such effective designs, SparseDrive surpasses previous state-of-the-arts by a large margin in performance of all tasks, while achieving much higher training and inference efficiency. Code will be avaliable at https://github.com/swc-17/SparseDrive for facilitating future research.
Read more6/3/2024

0
SparseAD: Sparse Query-Centric Paradigm for Efficient End-to-End Autonomous Driving
Diankun Zhang, Guoan Wang, Runwen Zhu, Jianbo Zhao, Xiwu Chen, Siyu Zhang, Jiahao Gong, Qibin Zhou, Wenyuan Zhang, Ningzi Wang, Feiyang Tan, Hangning Zhou, Ziyao Xu, Haotian Yao, Chi Zhang, Xiaojun Liu, Xiaoguang Di, Bin Li
End-to-End paradigms use a unified framework to implement multi-tasks in an autonomous driving system. Despite simplicity and clarity, the performance of end-to-end autonomous driving methods on sub-tasks is still far behind the single-task methods. Meanwhile, the widely used dense BEV features in previous end-to-end methods make it costly to extend to more modalities or tasks. In this paper, we propose a Sparse query-centric paradigm for end-to-end Autonomous Driving (SparseAD), where the sparse queries completely represent the whole driving scenario across space, time and tasks without any dense BEV representation. Concretely, we design a unified sparse architecture for perception tasks including detection, tracking, and online mapping. Moreover, we revisit motion prediction and planning, and devise a more justifiable motion planner framework. On the challenging nuScenes dataset, SparseAD achieves SOTA full-task performance among end-to-end methods and significantly narrows the performance gap between end-to-end paradigms and single-task methods. Codes will be released soon.
Read more4/11/2024

0
DiFSD: Ego-Centric Fully Sparse Paradigm with Uncertainty Denoising and Iterative Refinement for Efficient End-to-End Autonomous Driving
Haisheng Su, Wei Wu, Junchi Yan
Current end-to-end autonomous driving methods resort to unifying modular designs for various tasks (e.g. perception, prediction and planning). Although optimized in a planning-oriented spirit with a fully differentiable framework, existing end-to-end driving systems without ego-centric designs still suffer from unsatisfactory performance and inferior efficiency, owing to the rasterized scene representation learning and redundant information transmission. In this paper, we revisit the human driving behavior and propose an ego-centric fully sparse paradigm, named DiFSD, for end-to-end self-driving. Specifically, DiFSD mainly consists of sparse perception, hierarchical interaction and iterative motion planner. The sparse perception module performs detection, tracking and online mapping based on sparse representation of the driving scene. The hierarchical interaction module aims to select the Closest In-Path Vehicle / Stationary (CIPV / CIPS) from coarse to fine, benefiting from an additional geometric prior. As for the iterative motion planner, both selected interactive agents and ego-vehicle are considered for joint motion prediction, where the output multi-modal ego-trajectories are optimized in an iterative fashion. Besides, both position-level motion diffusion and trajectory-level planning denoising are introduced for uncertainty modeling, thus facilitating the training stability and convergence of the whole framework. Extensive experiments conducted on nuScenes dataset demonstrate the superior planning performance and great efficiency of DiFSD, which significantly reduces the average L2 error by textbf{66%} and collision rate by textbf{77%} than UniAD while achieves textbf{8.2$times$} faster running efficiency.
Read more9/17/2024
0
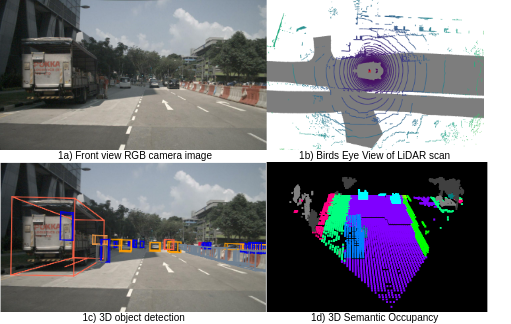
Real-time 3D semantic occupancy prediction for autonomous vehicles using memory-efficient sparse convolution
Samuel Sze, Lars Kunze
In autonomous vehicles, understanding the surrounding 3D environment of the ego vehicle in real-time is essential. A compact way to represent scenes while encoding geometric distances and semantic object information is via 3D semantic occupancy maps. State of the art 3D mapping methods leverage transformers with cross-attention mechanisms to elevate 2D vision-centric camera features into the 3D domain. However, these methods encounter significant challenges in real-time applications due to their high computational demands during inference. This limitation is particularly problematic in autonomous vehicles, where GPU resources must be shared with other tasks such as localization and planning. In this paper, we introduce an approach that extracts features from front-view 2D camera images and LiDAR scans, then employs a sparse convolution network (Minkowski Engine), for 3D semantic occupancy prediction. Given that outdoor scenes in autonomous driving scenarios are inherently sparse, the utilization of sparse convolution is particularly apt. By jointly solving the problems of 3D scene completion of sparse scenes and 3D semantic segmentation, we provide a more efficient learning framework suitable for real-time applications in autonomous vehicles. We also demonstrate competitive accuracy on the nuScenes dataset.
Read more5/21/2024