SpatialRGPT: Grounded Spatial Reasoning in Vision Language Model
2406.01584
0
0

Abstract
Vision Language Models (VLMs) have demonstrated remarkable performance in 2D vision and language tasks. However, their ability to reason about spatial arrangements remains limited. In this work, we introduce Spatial Region GPT (SpatialRGPT) to enhance VLMs' spatial perception and reasoning capabilities. SpatialRGPT advances VLMs' spatial understanding through two key innovations: (1) a data curation pipeline that enables effective learning of regional representation from 3D scene graphs, and (2) a flexible plugin module for integrating depth information into the visual encoder of existing VLMs. During inference, when provided with user-specified region proposals, SpatialRGPT can accurately perceive their relative directions and distances. Additionally, we propose SpatialRGBT-Bench, a benchmark with ground-truth 3D annotations encompassing indoor, outdoor, and simulated environments, for evaluating 3D spatial cognition in VLMs. Our results demonstrate that SpatialRGPT significantly enhances performance in spatial reasoning tasks, both with and without local region prompts. The model also exhibits strong generalization capabilities, effectively reasoning about complex spatial relations and functioning as a region-aware dense reward annotator for robotic tasks. Code, dataset, and benchmark will be released at https://www.anjiecheng.me/SpatialRGPT
Create account to get full access
Overview
• The paper "SpatialRGPT: Grounded Spatial Reasoning in Vision-Language Models" explores how large language models can be trained to reason about spatial relationships and concepts.
• The researchers developed a model called SpatialRGPT that aims to improve spatial reasoning abilities in vision-language models.
• SpatialRGPT is trained on a diverse dataset of images and text descriptions to learn spatial concepts and how to apply them to new situations.
Plain English Explanation
• Large language models like GPT-3 have become very skilled at understanding and generating human language. However, they can struggle with tasks that require spatial reasoning, such as understanding how objects are arranged in an image or following directions.
• The researchers wanted to create a model that could better comprehend and reason about spatial information. They trained their model, SpatialRGPT, on a dataset that included both images and text descriptions that mentioned spatial relationships, like "the book is on the table" or "the car is parked in front of the house."
• By learning these spatial concepts from the dataset, SpatialRGPT developed the ability to understand how objects are positioned relative to each other and apply that knowledge to new situations. For example, it could look at an image and determine that "the dog is next to the tree" or "the bike is behind the fence."
• This spatial reasoning ability could be very useful for applications like robots navigating environments, language models describing images, or AI systems following instructions about the physical world.
Technical Explanation
• The researchers trained SpatialRGPT on a dataset that combined images and text descriptions containing spatial relationships, such as "the book is on the table" or "the car is parked in front of the house."
• SpatialRGPT is based on the GPT-3 language model architecture, but the researchers modified it to better handle spatial reasoning tasks. This included adding specialized modules for processing visual information and reasoning about spatial concepts.
• To evaluate SpatialRGPT, the researchers tested it on a variety of tasks, such as image-text matching, spatial relation question-answering, and grounded instruction following. The results showed that SpatialRGPT outperformed standard language models on these spatial reasoning challenges.
Critical Analysis
• The researchers acknowledge that SpatialRGPT still has limitations and areas for improvement. For example, it may struggle with more complex spatial reasoning tasks or situations that require deeper understanding of 3D spatial relationships.
• Additionally, the dataset used to train SpatialRGPT, while diverse, may not capture the full breadth of spatial knowledge that humans possess. Expanding the training data and incorporating real-world experience could further enhance the model's spatial reasoning abilities.
• It's also important to consider potential biases or inconsistencies in the training data, which could be reflected in the model's outputs. Careful evaluation and validation will be crucial as SpatialRGPT and similar models are applied in real-world scenarios.
Conclusion
• The SpatialRGPT model represents an important step towards improving the spatial reasoning capabilities of large language models. By training on a dataset that combines visual and textual information about spatial relationships, the researchers were able to develop a model that can better understand and reason about the physical world.
• This advancement could have significant implications for a wide range of applications, from robotics and navigation to image captioning and language-guided interaction. As language models continue to evolve, incorporating spatial reasoning will be crucial for building AI systems that can truly understand and interact with the world around them.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔮
SpatialPIN: Enhancing Spatial Reasoning Capabilities of Vision-Language Models through Prompting and Interacting 3D Priors
Chenyang Ma, Kai Lu, Ta-Ying Cheng, Niki Trigoni, Andrew Markham
0
0
Current state-of-the-art spatial reasoning-enhanced VLMs are trained to excel at spatial visual question answering (VQA). However, we believe that higher-level 3D-aware tasks, such as articulating dynamic scene changes and motion planning, require a fundamental and explicit 3D understanding beyond current spatial VQA datasets. In this work, we present SpatialPIN, a framework designed to enhance the spatial reasoning capabilities of VLMs through prompting and interacting with priors from multiple 3D foundation models in a zero-shot, training-free manner. Extensive experiments demonstrate that our spatial reasoning-imbued VLM performs well on various forms of spatial VQA and can extend to help in various downstream robotics tasks such as pick and stack and trajectory planning.
6/10/2024
GSR-BENCH: A Benchmark for Grounded Spatial Reasoning Evaluation via Multimodal LLMs
Navid Rajabi, Jana Kosecka
0
0
The ability to understand and reason about spatial relationships between objects in images is an important component of visual reasoning. This skill rests on the ability to recognize and localize objects of interest and determine their spatial relation. Early vision and language models (VLMs) have been shown to struggle to recognize spatial relations. We extend the previously released What'sUp dataset and propose a novel comprehensive evaluation for spatial relationship understanding that highlights the strengths and weaknesses of 27 different models. In addition to the VLMs evaluated in What'sUp, our extensive evaluation encompasses 3 classes of Multimodal LLMs (MLLMs) that vary in their parameter sizes (ranging from 7B to 110B), training/instruction-tuning methods, and visual resolution to benchmark their performances and scrutinize the scaling laws in this task.
6/21/2024
🤔
Evaluating Spatial Understanding of Large Language Models
Yutaro Yamada, Yihan Bao, Andrew K. Lampinen, Jungo Kasai, Ilker Yildirim
0
0
Large language models (LLMs) show remarkable capabilities across a variety of tasks. Despite the models only seeing text in training, several recent studies suggest that LLM representations implicitly capture aspects of the underlying grounded concepts. Here, we explore LLM representations of a particularly salient kind of grounded knowledge -- spatial relationships. We design natural-language navigation tasks and evaluate the ability of LLMs, in particular GPT-3.5-turbo, GPT-4, and Llama2 series models, to represent and reason about spatial structures. These tasks reveal substantial variability in LLM performance across different spatial structures, including square, hexagonal, and triangular grids, rings, and trees. In extensive error analysis, we find that LLMs' mistakes reflect both spatial and non-spatial factors. These findings suggest that LLMs appear to capture certain aspects of spatial structure implicitly, but room for improvement remains.
4/16/2024
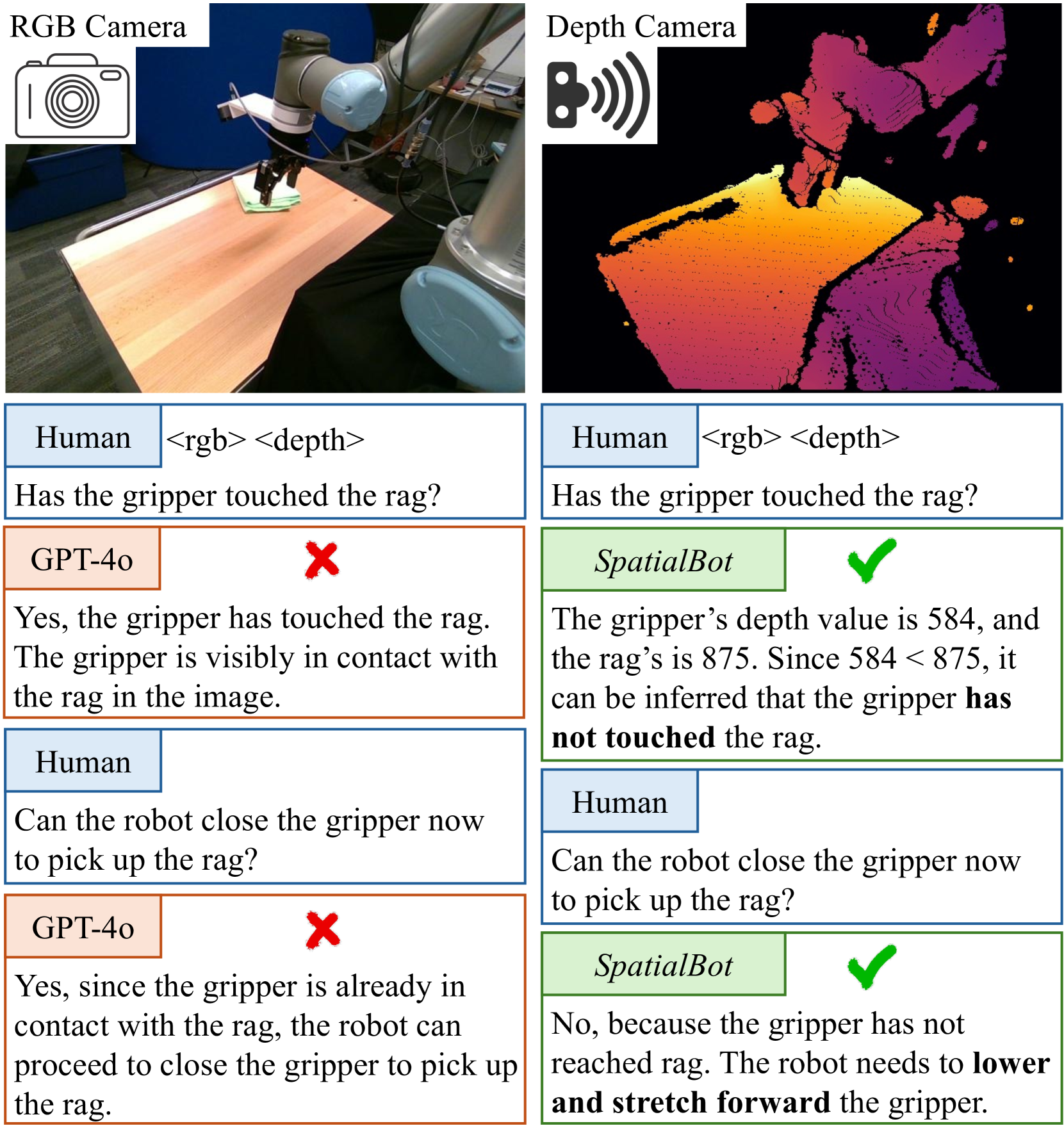
SpatialBot: Precise Spatial Understanding with Vision Language Models
Wenxiao Cai, Yaroslav Ponomarenko, Jianhao Yuan, Xiaoqi Li, Wankou Yang, Hao Dong, Bo Zhao
0
0
Vision Language Models (VLMs) have achieved impressive performance in 2D image understanding, however they are still struggling with spatial understanding which is the foundation of Embodied AI. In this paper, we propose SpatialBot for better spatial understanding by feeding both RGB and depth images. Additionally, we have constructed the SpatialQA dataset, which involves multi-level depth-related questions to train VLMs for depth understanding. Finally, we present SpatialBench to comprehensively evaluate VLMs' capabilities in spatial understanding at different levels. Extensive experiments on our spatial-understanding benchmark, general VLM benchmarks and Embodied AI tasks, demonstrate the remarkable improvements of SpatialBot trained on SpatialQA. The model, code and data are available at https://github.com/BAAI-DCAI/SpatialBot.
6/28/2024