Split Federated Learning Empowered Vehicular Edge Intelligence: Adaptive Parellel Design and Future Directions

0

Sign in to get full access
Overview
- This paper proposes a novel split federated learning approach to enable vehicular edge intelligence by adaptively parallelizing the training process.
- It introduces an adaptive parallel design that adjusts the degree of parallelism based on the available computational resources and network conditions.
- The proposed framework aims to enhance the performance and scalability of federated learning in dynamic vehicular environments while mitigating Byzantine attacks.
- The paper also discusses future research directions and challenges in this emerging field of federated learning-empowered vehicular edge intelligence.
Plain English Explanation
The paper introduces a new way to train machine learning models for vehicles, called split federated learning. Typically, vehicles would send their data to a central server to train a shared model. But with split federated learning, the training is split between the vehicles and the server, allowing the vehicles to do more of the work.
This approach is designed to work better in dynamic vehicle environments, where the available computing power and network conditions are constantly changing. The key innovation is an "adaptive parallel design" that adjusts how the training is divided between the vehicles and server, based on the available resources.
This allows the system to scale better and perform faster, while also being more resilient to attacks where some vehicles try to sabotage the training. Overall, the goal is to enable more powerful "edge intelligence" - the ability for vehicles to make smarter decisions independently, without relying entirely on a central server.
The paper also discusses future challenges and research directions in this area, as this split federated learning approach opens up new possibilities for vehicle-to-vehicle and vehicle-to-infrastructure collaboration in areas like self-driving cars and intelligent transportation systems.
Technical Explanation
The paper presents a split federated learning framework to enable vehicular edge intelligence. In this approach, the model training process is adaptively parallelized between vehicles and a central server, based on the available computational resources and network conditions.
The adaptive parallel design introduced in the paper dynamically adjusts the degree of parallelism to optimize performance. This allows the system to scale more effectively in dynamic vehicle environments, where resources may fluctuate.
The framework also incorporates mechanisms to mitigate Byzantine attacks, where malicious vehicles could try to sabotage the training process. This improves the robustness and reliability of the federated learning-empowered vehicular edge intelligence system.
Critical Analysis
The paper presents a novel and promising approach to enable more powerful edge intelligence in vehicular networks. The adaptive parallel design is a key innovation that addresses the challenges of dynamic resource availability and network conditions in these environments.
However, the paper does not provide a detailed evaluation of the system's performance under different scenarios, such as varying degrees of vehicle density, network disruptions, or Byzantine attacks. Further empirical studies would be needed to assess the practical benefits and limitations of the proposed framework.
Additionally, the paper does not discuss the potential privacy implications of split federated learning, where sensitive vehicle data may be shared with the central server. Addressing privacy concerns will be crucial for the real-world deployment of such systems.
Overall, the research presented in this paper opens up new directions for enhancing vehicular edge intelligence, but more work is needed to fully understand the practical trade-offs and challenges involved in implementing such a system.
Conclusion
This paper introduces a split federated learning approach to enable vehicular edge intelligence. The key innovation is an adaptive parallel design that dynamically adjusts the training process to optimize performance and scalability in dynamic vehicle environments, while also mitigating Byzantine attacks.
This research opens up new possibilities for federated learning-empowered vehicular edge intelligence, where vehicles can collaborate and make smarter decisions independently. However, further studies are needed to fully understand the practical trade-offs and address potential privacy concerns. Overall, this work represents an important step forward in enhancing the capabilities of intelligent transportation systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Split Federated Learning Empowered Vehicular Edge Intelligence: Adaptive Parellel Design and Future Directions
Xianke Qiang, Zheng Chang, Chaoxiong Ye, Timo Hamalainen, Geyong Min
To realize ubiquitous intelligence of future vehicular networks, artificial intelligence (AI) is critical since it can mine knowledge from vehicular data to improve the quality of many AI driven vehicular services. By combining AI techniques with vehicular networks, Vehicular Edge Intelligence (VEI) can utilize the computing, storage, and communication resources of vehicles to train the AI models. Nevertheless, when executing the model training, the traditional centralized learning paradigm requires vehicles to upload their raw data to a central server, which results in significant communication overheads and the risk of privacy leakage. In this article, we first overview the system architectures, performance metrics and challenges ahead of VEI design. Then we propose to utilize distribute machine learning scheme, namely split federated learning (SFL), to boost the development of VEI. We present a novel adaptive and parellel SFL scheme and conduct corresponding analysis on its performance. Future research directions are highlighted to shed light on the efficient design of SFL.
Read more6/28/2024
0
Adaptive and Parallel Split Federated Learning in Vehicular Edge Computing
Xianke Qiang, Zheng Chang, Yun Hu, Lei Liu, Timo Hamalainen
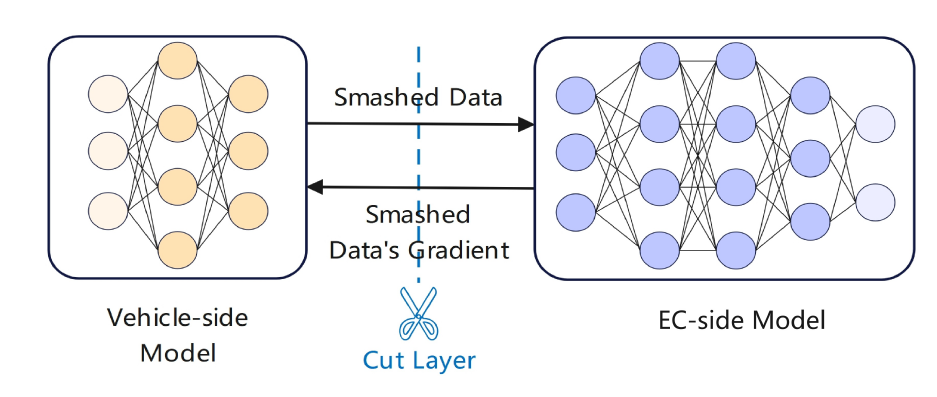
Vehicular edge intelligence (VEI) is a promising paradigm for enabling future intelligent transportation systems by accommodating artificial intelligence (AI) at the vehicular edge computing (VEC) system. Federated learning (FL) stands as one of the fundamental technologies facilitating collaborative model training locally and aggregation, while safeguarding the privacy of vehicle data in VEI. However, traditional FL faces challenges in adapting to vehicle heterogeneity, training large models on resource-constrained vehicles, and remaining susceptible to model weight privacy leakage. Meanwhile, split learning (SL) is proposed as a promising collaborative learning framework which can mitigate the risk of model wights leakage, and release the training workload on vehicles. SL sequentially trains a model between a vehicle and an edge cloud (EC) by dividing the entire model into a vehicle-side model and an EC-side model at a given cut layer. In this work, we combine the advantages of SL and FL to develop an Adaptive Split Federated Learning scheme for Vehicular Edge Computing (ASFV). The ASFV scheme adaptively splits the model and parallelizes the training process, taking into account mobile vehicle selection and resource allocation. Our extensive simulations, conducted on non-independent and identically distributed data, demonstrate that the proposed ASFV solution significantly reduces training latency compared to existing benchmarks, while adapting to network dynamics and vehicles' mobility.
Read more5/30/2024
🤷
0
Semi-Federated Learning for Internet of Intelligence
Wanli Ni, Zhaohui Yang
One key vision of intelligent Internet of Things (IoT) is to provide connected intelligence for a large number of application scenarios, such as self-driving cars, industrial manufacturing, and smart city. However, existing centralized or federated learning paradigms have difficulties in coordinating heterogeneous resources in distributed IoT environments. In this article, we introduce a semi-federated learning (SemiFL) framework to tackle the challenges of data and device heterogeneity in massive IoT networks. In SemiFL, only users with sufficient computing resources are selected for local model training, while the remaining users only transmit raw data to the base station for remote computing. By doing so, SemiFL incorporates conventional centralized and federated learning paradigms into a harmonized framework that allows all devices to participate in the global model training regardless of their computational capabilities and data distributions. Furthermore, we propose a next-generation multiple access scheme by seamlessly integrating communication and computation over the air. This achieves the concurrent transmission of raw data and model parameters in a spectrum-efficient manner. With their abilities to change channels and charge devices, two emerging techniques, reconfigurable intelligent surface and wireless energy transfer, are merged with our SemiFL framework to enhance its performance in bandwidth- and energy-limited IoT networks, respectively. Simulation results are presented to demonstrate the superiority of our SemiFL for achieving edge intelligence among computing-heterogeneous IoT devices.
Read more5/29/2024
🧪
0
VREM-FL: Mobility-Aware Computation-Scheduling Co-Design for Vehicular Federated Learning
Luca Ballotta, Nicol`o Dal Fabbro, Giovanni Perin, Luca Schenato, Michele Rossi, Giuseppe Piro
Assisted and autonomous driving are rapidly gaining momentum and will soon become a reality. Artificial intelligence and machine learning are regarded as key enablers thanks to the massive amount of data that smart vehicles will collect from onboard sensors. Federated learning is one of the most promising techniques for training global machine learning models while preserving data privacy of vehicles and optimizing communications resource usage. In this article, we propose vehicular radio environment map federated learning (VREM-FL), a computation-scheduling co-design for vehicular federated learning that combines mobility of vehicles with 5G radio environment maps. VREM-FL jointly optimizes learning performance of the global model and wisely allocates communication and computation resources. This is achieved by orchestrating local computations at the vehicles in conjunction with transmission of their local models in an adaptive and predictive fashion, by exploiting radio channel maps. The proposed algorithm can be tuned to trade training time for radio resource usage. Experimental results demonstrate that VREM-FL outperforms literature benchmarks for both a linear regression model (learning time reduced by 28%) and a deep neural network for semantic image segmentation (doubling the number of model updates within the same time window).
Read more6/4/2024