SRPose: Two-view Relative Pose Estimation with Sparse Keypoints

0

Sign in to get full access
Overview
- The paper proposes a new method called SRPose for estimating the relative pose between two camera views using sparse keypoints.
- SRPose leverages recent advancements in image matching and 3D reconstruction to achieve accurate and efficient relative pose estimation.
- The method outperforms existing approaches on several benchmark datasets, demonstrating its effectiveness for various computer vision tasks that require 6D object pose estimation.
Plain English Explanation
SRPose is a technique for determining the relative position and orientation (pose) between two camera views using only a few key features or "keypoints" in the images. This is an important problem in computer vision, as knowing the camera pose is crucial for tasks like 3D object detection and tracking, augmented reality, and robotics.
Previous methods for relative pose estimation often required dense 3D reconstructions or extensive camera calibration. SRPose, on the other hand, can achieve accurate results using just a sparse set of keypoints matched between the two views. This makes it more efficient and practical for real-world applications, such as motion capture or 6D object pose estimation.
The key innovation in SRPose is how it combines recent advancements in image matching and 3D reconstruction to estimate the relative pose. By leveraging these powerful techniques, the method can accurately determine the position and orientation of the cameras relative to each other using only a few corresponding keypoints in the two images.
Technical Explanation
SRPose builds on top of recent progress in image matching and 3D reconstruction to estimate the relative pose between two camera views. The method first extracts a sparse set of keypoints from each image and matches them across the views. It then uses these correspondences to estimate the essential matrix, which encodes the relative rotation and translation between the cameras.
The key innovation in SRPose is how it leverages the structure-from-motion (SfM) pipeline to refine the essential matrix estimate. Specifically, the method performs a series of iterative optimizations that alternately update the 3D structure of the scene and the camera poses. This allows it to accurately recover the relative pose using a sparse set of keypoints, unlike previous approaches that required dense 3D reconstructions or extensive camera calibration.
The authors evaluate SRPose on several standard benchmark datasets for relative pose estimation and 6D object pose estimation. The results show that SRPose outperforms existing methods, demonstrating its effectiveness for a variety of computer vision tasks that require accurate camera pose estimation.
Critical Analysis
The paper provides a thorough technical explanation of the SRPose method and its performance on benchmark tasks. However, the authors do not discuss any potential limitations or areas for further research.
One concern is the reliance on sparse keypoints, which may be sensitive to occlusions or changes in viewpoint. It would be interesting to see how SRPose compares to methods that use dense correspondences or learned feature descriptors, especially in more challenging real-world scenarios.
Additionally, the paper does not address the computational efficiency of the iterative optimization process used by SRPose. While the method is shown to be accurate, the runtime may be a concern for applications that require real-time performance.
Overall, the SRPose approach represents an interesting and effective solution for relative pose estimation using sparse keypoints. However, further research is needed to understand its limitations and explore potential improvements or extensions to the method.
Conclusion
The SRPose paper presents a new technique for estimating the relative pose between two camera views using sparse keypoints. By leveraging recent advancements in image matching and 3D reconstruction, the method can accurately determine the position and orientation of the cameras relative to each other without the need for dense 3D reconstructions or extensive camera calibration.
The results demonstrate that SRPose outperforms existing approaches on several benchmark datasets, making it a promising tool for a variety of computer vision applications that require accurate 6D object pose estimation, such as augmented reality, robotics, and motion capture. While the method has some potential limitations, the core ideas behind SRPose represent an important step forward in the field of relative pose estimation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
SRPose: Two-view Relative Pose Estimation with Sparse Keypoints
Rui Yin, Yulun Zhang, Zherong Pan, Jianjun Zhu, Cheng Wang, Biao Jia
Two-view pose estimation is essential for map-free visual relocalization and object pose tracking tasks. However, traditional matching methods suffer from time-consuming robust estimators, while deep learning-based pose regressors only cater to camera-to-world pose estimation, lacking generalizability to different image sizes and camera intrinsics. In this paper, we propose SRPose, a sparse keypoint-based framework for two-view relative pose estimation in camera-to-world and object-to-camera scenarios. SRPose consists of a sparse keypoint detector, an intrinsic-calibration position encoder, and promptable prior knowledge-guided attention layers. Given two RGB images of a fixed scene or a moving object, SRPose estimates the relative camera or 6D object pose transformation. Extensive experiments demonstrate that SRPose achieves competitive or superior performance compared to state-of-the-art methods in terms of accuracy and speed, showing generalizability to both scenarios. It is robust to different image sizes and camera intrinsics, and can be deployed with low computing resources.
Read more7/19/2024

0
SpaRP: Fast 3D Object Reconstruction and Pose Estimation from Sparse Views
Chao Xu, Ang Li, Linghao Chen, Yulin Liu, Ruoxi Shi, Hao Su, Minghua Liu
Open-world 3D generation has recently attracted considerable attention. While many single-image-to-3D methods have yielded visually appealing outcomes, they often lack sufficient controllability and tend to produce hallucinated regions that may not align with users' expectations. In this paper, we explore an important scenario in which the input consists of one or a few unposed 2D images of a single object, with little or no overlap. We propose a novel method, SpaRP, to reconstruct a 3D textured mesh and estimate the relative camera poses for these sparse-view images. SpaRP distills knowledge from 2D diffusion models and finetunes them to implicitly deduce the 3D spatial relationships between the sparse views. The diffusion model is trained to jointly predict surrogate representations for camera poses and multi-view images of the object under known poses, integrating all information from the input sparse views. These predictions are then leveraged to accomplish 3D reconstruction and pose estimation, and the reconstructed 3D model can be used to further refine the camera poses of input views. Through extensive experiments on three datasets, we demonstrate that our method not only significantly outperforms baseline methods in terms of 3D reconstruction quality and pose prediction accuracy but also exhibits strong efficiency. It requires only about 20 seconds to produce a textured mesh and camera poses for the input views. Project page: https://chaoxu.xyz/sparp.
Read more8/20/2024
🖼️
0
Leveraging Image Matching Toward End-to-End Relative Camera Pose Regression
Fadi Khatib, Yuval Margalit, Meirav Galun, Ronen Basri
This paper proposes a generalizable, end-to-end deep learning-based method for relative pose regression between two images. Given two images of the same scene captured from different viewpoints, our method predicts the relative rotation and translation (including direction and scale) between the two respective cameras. Inspired by the classical pipeline, our method leverages Image Matching (IM) as a pre-trained task for relative pose regression. Specifically, we use LoFTR, an architecture that utilizes an attention-based network pre-trained on Scannet, to extract semi-dense feature maps, which are then warped and fed into a pose regression network. Notably, we use a loss function that utilizes separate terms to account for the translation direction and scale. We believe such a separation is important because translation direction is determined by point correspondences while the scale is inferred from prior on shape sizes. Our ablations further support this choice. We evaluate our method on several datasets and show that it outperforms previous end-to-end methods. The method also generalizes well to unseen datasets.
Read more4/17/2024
0
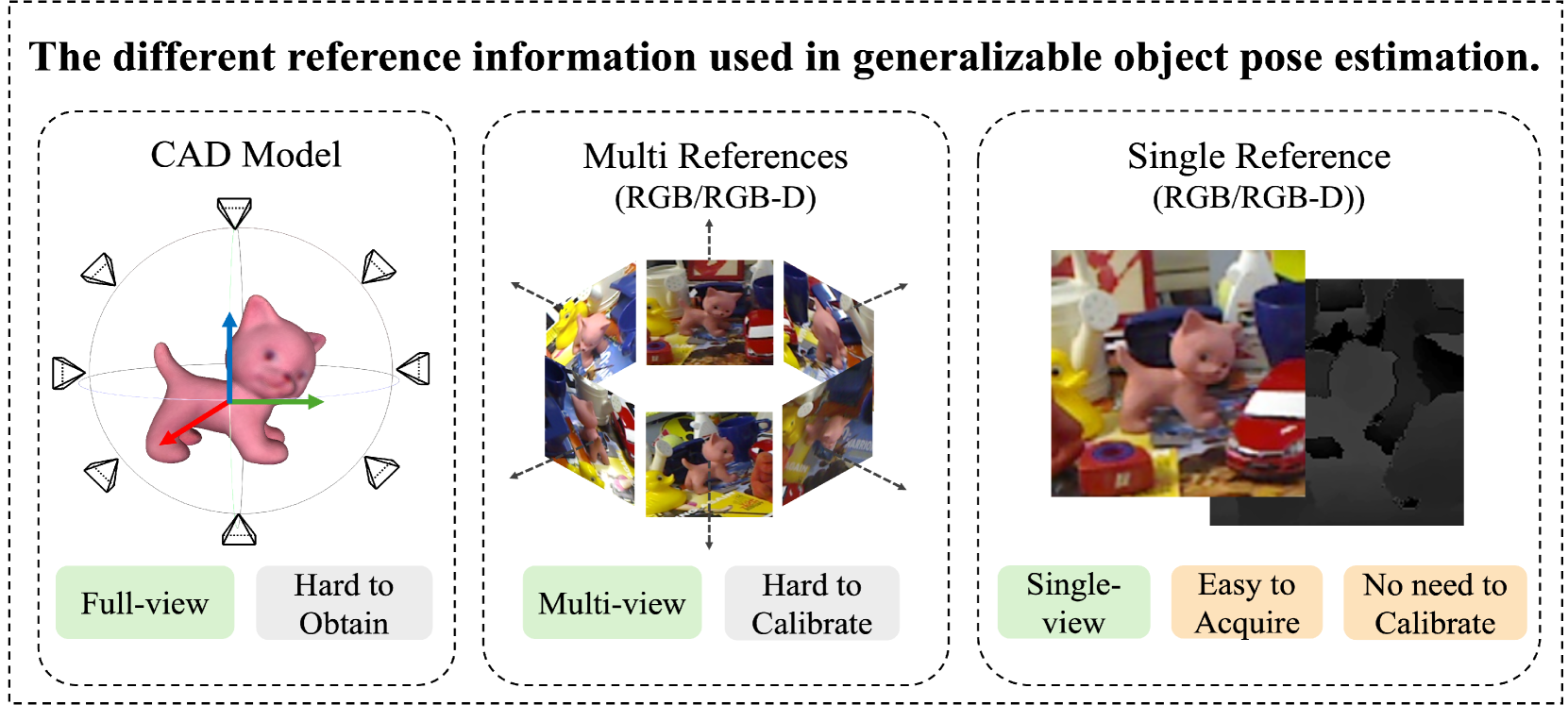
Towards Human-Level 3D Relative Pose Estimation: Generalizable, Training-Free, with Single Reference
Yuan Gao, Yajing Luo, Junhong Wang, Kui Jia, Gui-Song Xia
Humans can easily deduce the relative pose of an unseen object, without label/training, given only a single query-reference image pair. This is arguably achieved by incorporating (i) 3D/2.5D shape perception from a single image, (ii) render-and-compare simulation, and (iii) rich semantic cue awareness to furnish (coarse) reference-query correspondence. Existing methods implement (i) by a 3D CAD model or well-calibrated multiple images and (ii) by training a network on specific objects, which necessitate laborious ground-truth labeling and tedious training, potentially leading to challenges in generalization. Moreover, (iii) was less exploited in the paradigm of (ii), despite that the coarse correspondence from (iii) enhances the compare process by filtering out non-overlapped parts under substantial pose differences/occlusions. Motivated by this, we propose a novel 3D generalizable relative pose estimation method by elaborating (i) with a 2.5D shape from an RGB-D reference, (ii) with an off-the-shelf differentiable renderer, and (iii) with semantic cues from a pretrained model like DINOv2. Specifically, our differentiable renderer takes the 2.5D rotatable mesh textured by the RGB and the semantic maps (obtained by DINOv2 from the RGB input), then renders new RGB and semantic maps (with back-surface culling) under a novel rotated view. The refinement loss comes from comparing the rendered RGB and semantic maps with the query ones, back-propagating the gradients through the differentiable renderer to refine the 3D relative pose. As a result, our method can be readily applied to unseen objects, given only a single RGB-D reference, without label/training. Extensive experiments on LineMOD, LM-O, and YCB-V show that our training-free method significantly outperforms the SOTA supervised methods, especially under the rigorous Acc@5/10/15{deg} metrics and the challenging cross-dataset settings.
Read more6/27/2024