Stabilizing switched nonlinear systems under restricted but arbitrary switching signals

0
Sign in to get full access
Overview
- The research paper examines the stability of switched nonlinear systems under restricted but arbitrary switching signals.
- It proposes a method for designing stabilizing switching signals for such systems using multiple Lyapunov-like functions and graph theory.
- The approach is shown to provide input/output-to-state stability, which is an important property for practical applications.
Plain English Explanation
This research looks at a specific type of dynamic system called a "switched nonlinear system." These systems can switch between different modes of operation, and the switching patterns can be quite complex and unpredictable.
The key challenge is ensuring the overall system remains stable and well-behaved despite these switchings. The researchers developed a new technique that uses multiple Lyapunov-like functions, which are mathematical tools for analyzing stability, along with graph theory concepts. This allows them to design switching signals that keep the system stable, even when the switching patterns are restricted but still arbitrary.
The end result is a way to guarantee a desirable property called "input/output-to-state stability." This means the system will remain well-behaved and not diverge wildly, even when subject to disturbances or imperfect control inputs. This is an important consideration for many real-world applications of these types of dynamic systems.
Technical Explanation
The paper considers a class of switched nonlinear systems, where the dynamics can switch between different nonlinear subsystems in an arbitrary but restricted manner. The goal is to design stabilizing switching signals for these systems.
The authors propose a method based on multiple Lyapunov-like functions and graph theory. They construct a directed graph to represent the allowable switching patterns, with each node corresponding to a subsystem. Stability is then analyzed by associating a Lyapunov-like function with each node.
Conditions are derived such that if the Lyapunov-like functions satisfy certain relationships dictated by the graph structure, then the switched system will be input/output-to-state stable. This means bounded inputs and initial conditions will result in bounded state trajectories.
The technical approach involves establishing relationships between the Lyapunov-like functions at adjacent nodes in the graph. This allows the stability analysis to account for the restricted switching behavior. The result is a constructive method for designing stabilizing switching signals.
Critical Analysis
The paper provides a rigorous mathematical framework for analyzing the stability of switched nonlinear systems under restricted switching. The use of multiple Lyapunov-like functions and graph theory is a novel and insightful approach.
One potential limitation is that the switching restrictions, while arbitrary, are still assumed to be known a priori. In practice, the switching behavior may not be fully predictable or known in advance. Additionally, the conditions derived for input/output-to-state stability may be conservative, potentially limiting the applicability to certain classes of switched systems.
Further research could investigate methods for relaxing the assumptions on the switching pattern knowledge, or explore less conservative stability criteria. Validating the approach on realistic switched system examples would also help demonstrate its practical utility.
Conclusion
This research tackles an important problem in the analysis and design of switched nonlinear systems. By leveraging multiple Lyapunov-like functions and graph theory, the authors develop a systematic technique for constructing stabilizing switching signals, even when the switching is restricted but arbitrary.
The ability to guarantee input/output-to-state stability is a valuable result, as it ensures the switched system will remain well-behaved in the face of disturbances or imperfect control inputs. This has significant implications for the practical application of these types of dynamic systems in areas such as power electronics, robotics, and aerospace engineering.
Overall, this work represents a notable advance in the theoretical understanding and design of switched nonlinear systems, with the potential for meaningful impact on real-world engineering problems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Stabilizing switched nonlinear systems under restricted but arbitrary switching signals
Atreyee Kundu
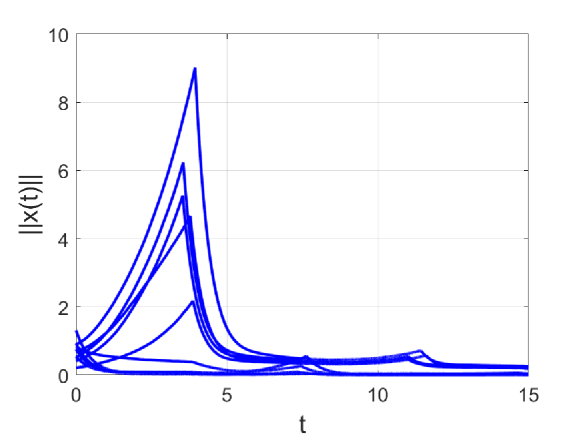
This paper deals with input/output-to-state stability (IOSS) of switched nonlinear systems whose switching signals obey pre-specified restrictions on admissible switches between the subsystems and admissible dwell times on the subsystems. We present sufficient conditions on the subsystems, admissible switches between them and admissible dwell times on them, such that a switched system generated under all switching signals obeying the given restrictions is IOSS. Multiple Lyapunov-like functions and graph theory are the key apparatuses for our analysis. A numerical example is presented to demonstrate our results.
Read more4/4/2024

0
Homogeneous Distributed Observers for Quasilinear Systems
Min Li, Andrey Polyakov, Siyuan Wang, Gang Zheng
The problem of finite/fixed-time cooperative state estimation is considered for a class of quasilinear systems with nonlinearities satisfying a Holder condition. A strongly connected nonlinear distributed observer is designed under the assumption of global observability. By proper parameter tuning with linear matrix inequalities, the observer error equation possesses finite/fixed-time stability in the perturbation-free case and input-to-state stability with respect to bounded perturbations. Numerical simulations are performed to validate this design.
Read more7/9/2024

0
A least-square method for non-asymptotic identification in linear switching control
Haoyuan Sun, Ali Jadbabaie
The focus of this paper is on linear system identification in the setting where it is known that the underlying partially-observed linear dynamical system lies within a finite collection of known candidate models. We first consider the problem of identification from a given trajectory, which in this setting reduces to identifying the index of the true model with high probability. We characterize the finite-time sample complexity of this problem by leveraging recent advances in the non-asymptotic analysis of linear least-square methods in the literature. In comparison to the earlier results that assume no prior knowledge of the system, our approach takes advantage of the smaller hypothesis class and leads to the design of a learner with a dimension-free sample complexity bound. Next, we consider the switching control of linear systems, where there is a candidate controller for each of the candidate models and data is collected through interaction of the system with a collection of potentially destabilizing controllers. We develop a dimension-dependent criterion that can detect those destabilizing controllers in finite time. By leveraging these results, we propose a data-driven switching strategy that identifies the unknown parameters of the underlying system. We then provide a non-asymptotic analysis of its performance and discuss its implications on the classical method of estimator-based supervisory control.
Read more4/15/2024
🏷️
0
On the Identifiability of Switching Dynamical Systems
Carles Balsells-Rodas, Yixin Wang, Yingzhen Li
The identifiability of latent variable models has received increasing attention due to its relevance in interpretability and out-of-distribution generalisation. In this work, we study the identifiability of Switching Dynamical Systems, taking an initial step toward extending identifiability analysis to sequential latent variable models. We first prove the identifiability of Markov Switching Models, which commonly serve as the prior distribution for the continuous latent variables in Switching Dynamical Systems. We present identification conditions for first-order Markov dependency structures, whose transition distribution is parametrised via non-linear Gaussians. We then establish the identifiability of the latent variables and non-linear mappings in Switching Dynamical Systems up to affine transformations, by leveraging identifiability analysis techniques from identifiable deep latent variable models. We finally develop estimation algorithms for identifiable Switching Dynamical Systems. Throughout empirical studies, we demonstrate the practicality of identifiable Switching Dynamical Systems for segmenting high-dimensional time series such as videos, and showcase the use of identifiable Markov Switching Models for regime-dependent causal discovery in climate data.
Read more6/5/2024