Stable Object Placement Under Geometric Uncertainty via Differentiable Contact Dynamics

0

Sign in to get full access
Overview
- This paper presents a novel approach for stable object placement under geometric uncertainty using differentiable contact dynamics.
- The method uses a differentiable simulation of contact forces to optimize object placements that maximize stability.
- The authors demonstrate the effectiveness of their approach through experiments with simulated and real-world objects.
Plain English Explanation
The paper describes a new way to place objects in a stable position even when there is uncertainty about the exact shape or location of the object. The key idea is to use a differentiable simulation of the contact forces between the object and its surroundings.
This allows the system to optimize the object's placement in a way that maximizes the object's stability, even with imperfect information about its geometry. The authors show that this approach works well both in simulated environments and with real-world objects.
Technical Explanation
The paper introduces a method for stable object placement that accounts for geometric uncertainty. The core innovation is the use of differentiable contact dynamics to optimize object placements.
The authors develop a differentiable forward simulation of contact forces, which allows them to efficiently compute gradients with respect to the object's pose. They then use these gradients in an optimization process to find placements that maximize the object's stability, as quantified by a stability metric.
Experiments are conducted in both simulated and real-world settings, demonstrating the effectiveness of the proposed approach. The results show that the method can reliably place objects in stable configurations even with significant geometric uncertainty.
Critical Analysis
The paper presents a compelling approach to the problem of stable object placement under uncertainty. The use of differentiable contact dynamics is a novel and promising technique that allows for efficient optimization of object poses.
One potential limitation is the reliance on a specific stability metric, which may not capture all the nuances of real-world stability requirements. Additional research could explore more comprehensive stability criteria or methods to adapt the metric to different applications.
Furthermore, the paper focuses on static placements and does not consider dynamic scenarios where the object's pose may change over time. Extending the approach to handle dynamic stability could be an interesting direction for future work.
Overall, this research represents a significant advance in the field of object manipulation under uncertainty, with important implications for applications such as robotic grasping, assembly, and navigation.
Conclusion
This paper introduces a novel approach for stable object placement under geometric uncertainty, using differentiable contact dynamics to optimize object poses for maximum stability. The authors demonstrate the effectiveness of their method through simulated and real-world experiments, showcasing its potential to improve the reliability and robustness of object manipulation tasks.
The use of differentiable simulation to guide the optimization process is a key innovation that could have broader applications in other areas of robotics and physics-based modeling. While the current work has some limitations, the insights and techniques presented in this paper represent an important step forward in the field of manipulation under uncertainty.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Stable Object Placement Under Geometric Uncertainty via Differentiable Contact Dynamics
Linfeng Li, Gang Yang, Lin Shao, David Hsu
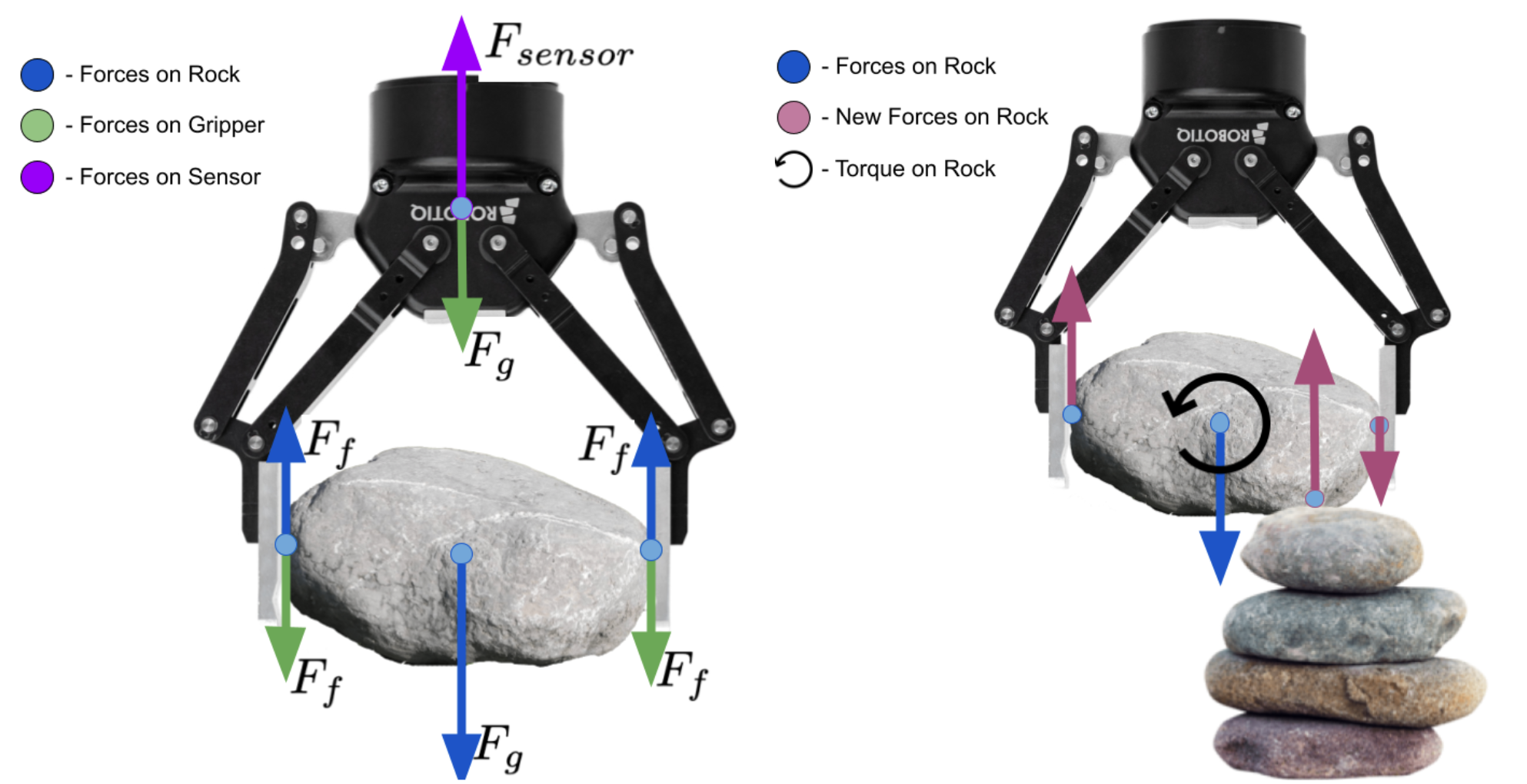
From serving a cup of coffee to carefully rearranging delicate items, stable object placement is a crucial skill for future robots. This skill is challenging due to the required accuracy, which is difficult to achieve under geometric uncertainty. We leverage differentiable contact dynamics to develop a principled method for stable object placement under geometric uncertainty. We estimate the geometric uncertainty by minimizing the discrepancy between the force-torque sensor readings and the model predictions through gradient descent. We further keep track of a belief over multiple possible geometric parameters to mitigate the gradient-based method's sensitivity to the initialization. We verify our approach in the real world on various geometric uncertainties, including the in-hand pose uncertainty of the grasped object, the object's shape uncertainty, and the environment's shape uncertainty.
Read more9/27/2024

0
Tactile Probabilistic Contact Dynamics Estimation of Unknown Objects
Jinhoo Kim, Yifan Zhu, Aaron Dollar
We study the problem of rapidly identifying contact dynamics of unknown objects in partially known environments. The key innovation of our method is a novel formulation of the contact dynamics estimation problem as the joint estimation of contact geometries and physical parameters. We leverage DeepSDF, a compact and expressive neural-network-based geometry representation over a distribution of geometries, and adopt a particle filter to estimate both the geometries in contact and the physical parameters. In addition, we couple the estimator with an active exploration strategy that plans information-gathering moves to further expedite online estimation. Through simulation and physical experiments, we show that our method estimates accurate contact dynamics with fewer than 30 exploration moves for unknown objects touching partially known environments.
Read more9/27/2024
0
Precise Object Placement Using Force-Torque Feedback
Osher Lerner, Zachary Tam, Michael Equi
Precise object manipulation and placement is a common problem for household robots, surgery robots, and robots working on in-situ construction. Prior work using computer vision, depth sensors, and reinforcement learning lacks the ability to reactively recover from planning errors, execution errors, or sensor noise. This work introduces a method that uses force-torque sensing to robustly place objects in stable poses, even in adversarial environments. On 46 trials, our method finds success rates of 100% for basic stacking, and 17% for cases requiring adjustment.
Read more4/30/2024
0
Trajectory Optimization under Contact Timing Uncertainties
Haizhou Zhao, Majid Khadiv
Most interesting problems in robotics (e.g., locomotion and manipulation) are realized through intermittent contact with the environment. Due to the perception and modeling errors, assuming an exact time for establishing contact with the environment is unrealistic. On the other hand, handling uncertainties in contact timing is notoriously difficult as it gives rise to either handling uncertain complementarity systems or solving combinatorial optimization problems at run-time. This work presents a novel optimal control formulation to find robust control policies under contact timing uncertainties. Our main novelty lies in casting the stochastic problem to a deterministic optimization over the uncertainty set that ensures robustness criterion satisfaction of candidate pre-contact states and optimizes for contact-relevant objectives. This way, we only need to solve a manageable standard nonlinear programming problem without complementarity constraints or combinatorial explosion. Our simulation results on multiple simplified locomotion and manipulation tasks demonstrate the robustness of our uncertainty-aware formulation compared to the nominal optimal control formulation.
Read more7/17/2024