Trajectory Optimization under Contact Timing Uncertainties

0
Sign in to get full access
Overview
- This paper presents a new approach for trajectory optimization under contact timing uncertainties in robotic systems.
- The proposed method aims to generate robust trajectories that can handle uncertainties in the timing of contacts between the robot and its environment.
- The researchers demonstrate their approach on a simulated 3D hopping robot and show that it can outperform traditional trajectory optimization methods in the presence of contact timing uncertainties.
Plain English Explanation
Robots often need to interact with their environment, such as by making physical contact with objects or surfaces. However, the exact timing of when these contacts occur can be uncertain or unpredictable. This can make it challenging to plan the robot's movements, as the robot needs to adjust its trajectory to account for these uncertain contact timings.
The researchers in this paper developed a new technique to help robots plan their movements more effectively in the face of contact timing uncertainties. Their approach involves optimizing the robot's trajectory in a way that makes it more robust to these uncertainties. By doing so, the robot can better adapt its movements to handle unexpected contact timings, leading to more reliable and stable performance.
To test their method, the researchers simulated a 3D hopping robot and compared their approach to traditional trajectory optimization techniques. They found that their new method was able to generate trajectories that were significantly more robust to contact timing uncertainties, allowing the robot to maintain its balance and successfully complete its tasks even when the contacts occurred at unexpected times.
This research could have important implications for a wide range of robotic applications, such as link to "Towards Tight Convex Relaxations for Contact-Rich Manipulation" and link to "Energy-Based Contact Planning Under Uncertainty for Robot Manipulation", where the ability to handle contact timing uncertainties is crucial for reliable and safe operation.
Technical Explanation
The researchers formulate the trajectory optimization problem as a nonlinear program, where the goal is to find the optimal sequence of control inputs that minimizes a cost function while satisfying a set of constraints. To account for contact timing uncertainties, they introduce additional constraints that ensure the trajectory remains feasible even when the contact timings deviate from their nominal values.
Specifically, the researchers model the contact timing uncertainties as random variables with known probability distributions. They then use a chance-constrained optimization approach, where the trajectory optimization problem is solved to ensure that the probability of constraint violations (due to the contact timing uncertainties) is below a specified threshold.
To solve this chance-constrained optimization problem, the researchers leverage recent advances in link to "Multi-Contact Stochastic Predictive Control for Legged Robots" and link to "Adaptive Robust Controller for Handling Unknown Uncertainty in Robotic Manipulation", which allow them to efficiently handle the high-dimensional and non-convex nature of the problem.
The researchers demonstrate their approach on a simulated 3D hopping robot, where they show that their method can generate trajectories that are significantly more robust to contact timing uncertainties compared to traditional trajectory optimization techniques.
Critical Analysis
The researchers acknowledge several limitations of their approach, including the assumption of known probability distributions for the contact timing uncertainties and the computational complexity of solving the chance-constrained optimization problem. They also note that their simulations only consider a simplified 3D hopping robot, and further validation on more complex robotic systems is needed.
Additionally, the researchers do not provide a comprehensive comparison of their method to other existing approaches for handling contact timing uncertainties, such as link to "Energy-Based Contact Planning Under Uncertainty for Robot Manipulation" or link to "Learning Feasible Transitions for Efficient Contact Planning". It would be valuable to see how their method performs relative to these other techniques in terms of robustness, computational efficiency, and practical applicability.
Conclusion
This paper presents a novel approach for trajectory optimization under contact timing uncertainties, which is a critical challenge in many robotic applications. The researchers demonstrate the effectiveness of their method on a simulated 3D hopping robot, showing that it can generate more robust trajectories compared to traditional techniques.
The proposed approach has the potential to significantly improve the reliability and stability of robotic systems that must interact with their environment, particularly in domains where contact timing uncertainties are prevalent. Further research and validation on more complex robotic platforms will be important to assess the broader applicability and practicality of this technique.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Trajectory Optimization under Contact Timing Uncertainties
Haizhou Zhao, Majid Khadiv
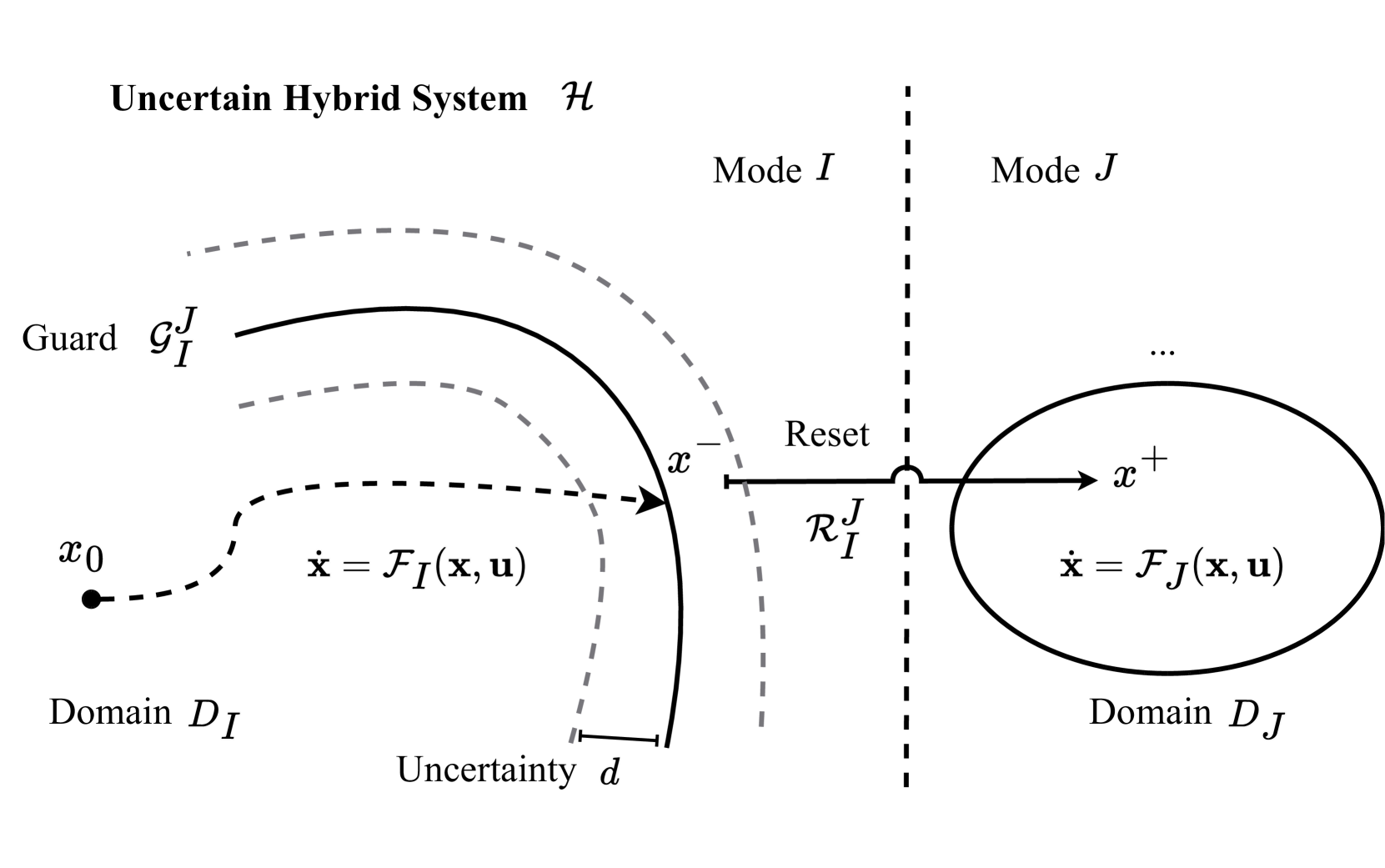
Most interesting problems in robotics (e.g., locomotion and manipulation) are realized through intermittent contact with the environment. Due to the perception and modeling errors, assuming an exact time for establishing contact with the environment is unrealistic. On the other hand, handling uncertainties in contact timing is notoriously difficult as it gives rise to either handling uncertain complementarity systems or solving combinatorial optimization problems at run-time. This work presents a novel optimal control formulation to find robust control policies under contact timing uncertainties. Our main novelty lies in casting the stochastic problem to a deterministic optimization over the uncertainty set that ensures robustness criterion satisfaction of candidate pre-contact states and optimizes for contact-relevant objectives. This way, we only need to solve a manageable standard nonlinear programming problem without complementarity constraints or combinatorial explosion. Our simulation results on multiple simplified locomotion and manipulation tasks demonstrate the robustness of our uncertainty-aware formulation compared to the nominal optimal control formulation.
Read more7/17/2024
❗
0
Multi-contact Stochastic Predictive Control for Legged Robots with Contact Locations Uncertainty
Ahmad Gazar, Majid Khadiv, Andrea Del Prete, Ludovic Righetti
Trajectory optimization under uncertainties is a challenging problem for robots in contact with the environment. Such uncertainties are inevitable due to estimation errors, control imperfections, and model mismatches between planning models used for control and the real robot dynamics. This induces control policies that could violate the contact location constraints by making contact at unintended locations, and as a consequence leading to unsafe motion plans. This work addresses the problem of robust kino-dynamic whole-body trajectory optimization using stochastic nonlinear model predictive control (SNMPC) by considering additive uncertainties on the model dynamics subject to contact location chance-constraints as a function of robot's full kinematics. We demonstrate the benefit of using SNMPC over classic nonlinear MPC (NMPC) for whole-body trajectory optimization in terms of contact location constraint satisfaction (safety). We run extensive Monte-Carlo simulations for a quadruped robot performing agile trotting and bounding motions over small stepping stones, where contact location satisfaction becomes critical. Our results show that SNMPC is able to perform all motions safely with 100% success rate, while NMPC failed 48.3% of all motions.
Read more6/14/2024

0
Towards Tight Convex Relaxations for Contact-Rich Manipulation
Bernhard Paus Graesdal, Shao Yuan Chew Chia, Tobia Marcucci, Savva Morozov, Alexandre Amice, Pablo A. Parrilo, Russ Tedrake
We present a novel method for global motion planning of robotic systems that interact with the environment through contacts. Our method directly handles the hybrid nature of such tasks using tools from convex optimization. We formulate the motion-planning problem as a shortest-path problem in a graph of convex sets, where a path in the graph corresponds to a contact sequence and a convex set models the quasi-static dynamics within a fixed contact mode. For each contact mode, we use semidefinite programming to relax the nonconvex dynamics that results from the simultaneous optimization of the object's pose, contact locations, and contact forces. The result is a tight convex relaxation of the overall planning problem, that can be efficiently solved and quickly rounded to find a feasible contact-rich trajectory. As an initial application for evaluating our method, we apply it on the task of planar pushing. Exhaustive experiments show that our convex-optimization method generates plans that are consistently within a small percentage of the global optimum, without relying on an initial guess, and that our method succeeds in finding trajectories where a state-of-the-art baseline for contact-rich planning usually fails. We demonstrate the quality of these plans on a real robotic system.
Read more7/8/2024

0
Adaptive Robust Controller for handling Unknown Uncertainty of Robotic Manipulators
Mohamed Abdelwahab, Giulio Giacomuzzo, Alberto Dalla Libera, Ruggero Carli
The ability to achieve precise and smooth trajectory tracking is crucial for ensuring the successful execution of various tasks involving robotic manipulators. State-of-the-art techniques require accurate mathematical models of the robot dynamics, and robustness to model uncertainties is achieved by relying on precise bounds on the model mismatch. In this paper, we propose a novel adaptive robust feedback linearization scheme able to compensate for model uncertainties without any a-priori knowledge on them, and we provide a theoretical proof of convergence under mild assumptions. We evaluate the method on a simulated RR robot. First, we consider a nominal model with known model mismatch, which allows us to compare our strategy with state-of-the-art uncertainty-aware methods. Second, we implement the proposed control law in combination with a learned model, for which uncertainty bounds are not available. Results show that our method leads to performance comparable to uncertainty-aware methods while requiring less prior knowledge.
Read more6/21/2024