Safe and Efficient Estimation for Robotics through the Optimal Use of Resources

0
Sign in to get full access
Overview
- This research paper proposes a framework for safe and efficient state estimation in robotic systems, focusing on the optimal use of resources.
- The key ideas include leveraging optimization techniques to balance estimation accuracy, computational cost, and safety.
- The paper explores applications in areas such as legged robotics, system identification, and informative path planning.
Plain English Explanation
When building robotic systems, engineers need to balance several competing goals. They want the robot to have accurate information about its surroundings and its own internal state, but they also need to keep the computational cost low and ensure the robot's actions are safe. This paper presents a framework that uses optimization techniques to find the right trade-offs.
The core idea is to treat state estimation as an optimization problem. The robot has limited computational resources, so it needs to decide how to use them wisely. Should it spend more time and energy getting highly precise measurements, or should it prioritize speed and safety? The optimization framework can analyze the situation and determine the best balance.
The researchers apply this approach to several robotic applications. For legged robots, it helps the robot maintain balance and avoid falling over. For system identification, it allows the robot to learn about its own mechanics more efficiently. And for path planning, it helps the robot choose routes that gather the most useful information while still moving safely.
Technical Explanation
The paper introduces a general framework for safe and efficient state estimation, which the authors call "OptiState." The key innovation is to formulate state estimation as an optimization problem, where the goal is to minimize a cost function that captures both estimation accuracy and resource usage.
The framework includes several components:
- State Estimator: A module that uses sensor data to estimate the robot's internal state and external environment.
- Resource Monitor: Tracks the computational and energy resources available to the robot.
- Optimizer: Adjusts the state estimator's parameters to find the optimal balance between estimation accuracy and resource usage.
The optimizer uses techniques like moving horizon estimation and informative path planning to intelligently allocate the robot's limited resources. This allows the system to maintain high estimation quality while ensuring safety and efficiency.
The paper demonstrates the OptiState framework in several robotic applications:
- Legged Robotics: The optimizer helps the robot maintain balance and avoid falls by adjusting the state estimator's parameters based on the current situation.
- System Identification: The framework enables the robot to efficiently learn about its own mechanics by optimizing the system identification process.
- Informative Path Planning: The optimizer guides the robot to choose paths that gather the most useful information while still moving safely.
Critical Analysis
The paper presents a well-designed and comprehensive framework for safe and efficient state estimation in robotics. The optimization-based approach is a novel and promising direction, as it allows the system to dynamically adapt to the available resources and the specific requirements of the task at hand.
One potential limitation is that the framework relies on accurate models of the robot's dynamics and sensing capabilities. In real-world scenarios, these models may not be perfect, which could impact the optimizer's ability to make optimal decisions. The authors acknowledge this challenge and suggest incorporating more robust techniques, such as sensor fusion and contact detection, to improve the reliability of the state estimation.
Additionally, the paper focuses on single-robot scenarios. Extending the framework to handle multi-robot systems, where resources and information need to be shared, could be an interesting avenue for future research.
Conclusion
This research paper presents a novel optimization-based framework for safe and efficient state estimation in robotic systems. By treating state estimation as an optimization problem, the framework can intelligently allocate the robot's limited computational and energy resources to maintain high estimation accuracy while ensuring safety and efficiency.
The paper demonstrates the versatility of the approach through applications in legged robotics, system identification, and informative path planning. The optimization-based techniques show promising results in balancing the trade-offs between estimation quality, resource usage, and safety.
Overall, this work advances the field of robotic state estimation and provides a valuable framework for developing more robust and efficient robotic systems that can operate safely in complex environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Safe and Efficient Estimation for Robotics through the Optimal Use of Resources
Frederike Dumbgen
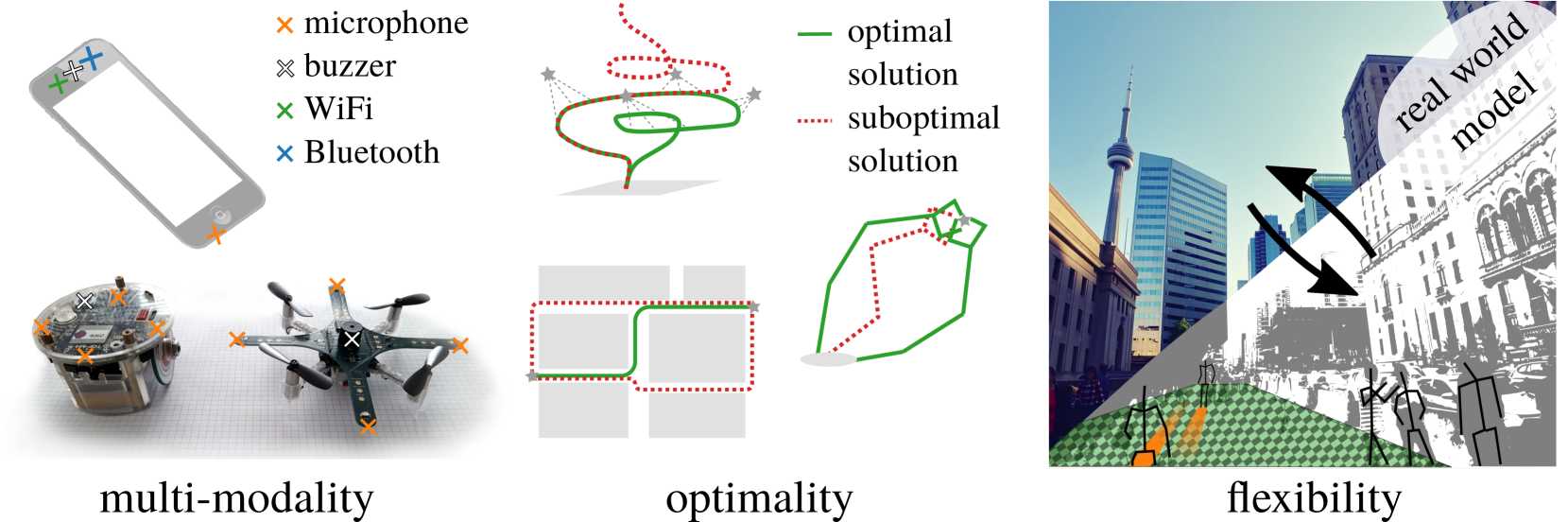
In order to operate in and interact with the physical world, robots need to have estimates of the current and future state of the environment. We thus equip robots with sensors and build models and algorithms that, given some measurements, produce estimates of the current or future states. Environments can be unpredictable and sensors are not perfect. Therefore, it is important to both use all information available, and to do so optimally: making sure that we get the best possible answer from the amount of information we have. However, in prevalent research, uncommon sensors, such as sound or radio-frequency signals, are commonly ignored for state estimation; and the most popular solvers employed to produce state estimates are only of local nature, meaning they may produce suboptimal estimates for the typically non-convex estimation problems. My research aims to use resources more optimally, by building on 1) multi-modality: using ubiquitous RF transceivers and microphones to support state estimation, 2) building certifiably optimal solvers and 3) learning and improving adequate models from data.
Read more5/30/2024
0
State Estimation and Environment Recognition for Articulated Structures via Proximity Sensors Distributed over the Whole Body
Kengo Iwao, Hikaru Arita, Kenji Tahara
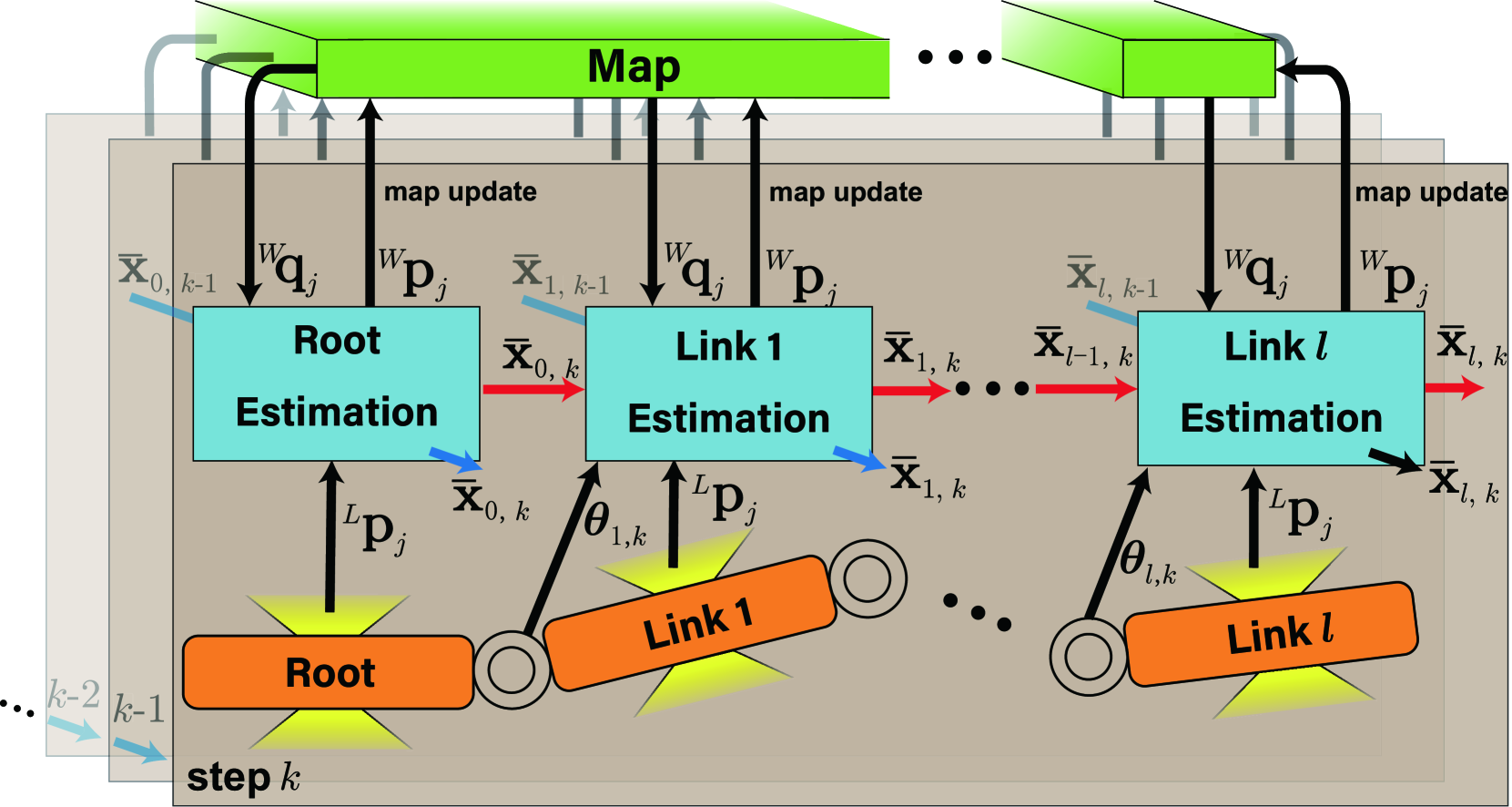
For robots with low rigidity, determining the robot's state based solely on kinematics is challenging. This is particularly crucial for a robot whose entire body is in contact with the environment, as accurate state estimation is essential for environmental interaction. We propose a method for simultaneous articulated robot posture estimation and environmental mapping by integrating data from proximity sensors distributed over the whole body. Our method extends the discrete-time model, typically used for state estimation, to the spatial direction of the articulated structure. The simulations demonstrate that this approach significantly reduces estimation errors.
Read more9/20/2024

0
OptiState: State Estimation of Legged Robots using Gated Networks with Transformer-based Vision and Kalman Filtering
Alexander Schperberg, Yusuke Tanaka, Saviz Mowlavi, Feng Xu, Bharathan Balaji, Dennis Hong
State estimation for legged robots is challenging due to their highly dynamic motion and limitations imposed by sensor accuracy. By integrating Kalman filtering, optimization, and learning-based modalities, we propose a hybrid solution that combines proprioception and exteroceptive information for estimating the state of the robot's trunk. Leveraging joint encoder and IMU measurements, our Kalman filter is enhanced through a single-rigid body model that incorporates ground reaction force control outputs from convex Model Predictive Control optimization. The estimation is further refined through Gated Recurrent Units, which also considers semantic insights and robot height from a Vision Transformer autoencoder applied on depth images. This framework not only furnishes accurate robot state estimates, including uncertainty evaluations, but can minimize the nonlinear errors that arise from sensor measurements and model simplifications through learning. The proposed methodology is evaluated in hardware using a quadruped robot on various terrains, yielding a 65% improvement on the Root Mean Squared Error compared to our VIO SLAM baseline. Code example: https://github.com/AlexS28/OptiState
Read more4/30/2024

0
Optimization-Based System Identification and Moving Horizon Estimation Using Low-Cost Sensors for a Miniature Car-Like Robot
Sabrina Bodmer, Lukas Vogel, Simon Muntwiler, Alexander Hansson, Tobias Bodewig, Jonas Wahlen, Melanie N. Zeilinger, Andrea Carron
This paper presents an open-source miniature car-like robot with low-cost sensing and a pipeline for optimization-based system identification, state estimation, and control. The overall robotics platform comes at a cost of less than $700 and thus significantly simplifies the verification of advanced algorithms in a realistic setting. We present a modified bicycle model with Pacejka tire forces to model the dynamics of the considered all-wheel drive vehicle and to prevent singularities of the model at low velocities. Furthermore, we provide an optimization-based system identification approach and a moving horizon estimation (MHE) scheme. In extensive hardware experiments, we show that the presented system identification approach results in a model with high prediction accuracy, while the MHE results in accurate state estimates. Finally, the overall closed-loop system is shown to perform well even in the presence of sensor failure for limited time intervals. All hardware, firmware, and control and estimation software is released under a BSD 2-clause license to promote widespread adoption and collaboration within the community.
Read more4/15/2024