StreetNav: Leveraging Street Cameras to Support Precise Outdoor Navigation for Blind Pedestrians

0
📊
Sign in to get full access
Overview
- Blind and low-vision (BLV) people rely on GPS-based systems for outdoor navigation, but GPS inaccuracy causes them to veer off track, run into obstacles, and struggle to reach precise destinations.
- Prior work has made precise indoor navigation possible through hardware installations, but enabling this outdoors remains a challenge.
- Many outdoor environments are already instrumented with hardware such as street cameras, which could potentially be repurposed for outdoor navigation.
Plain English Explanation
The paper explores the idea of using existing street cameras to help blind and low-vision people navigate outdoors more precisely than GPS. Today, BLV people use GPS-based systems for outdoor navigation, but the inaccuracy of GPS causes them to wander off course, run into obstacles, and have difficulty reaching their exact destination.
While researchers have developed systems that can provide precise indoor navigation by installing specialized hardware, creating a similar solution for outdoor environments has remained a challenge. Interestingly, many outdoor spaces are already equipped with street cameras, which the researchers think could potentially be repurposed to assist BLV pedestrians with navigation.
The team took a community-driven approach, engaging with various stakeholders including BLV users, residents, business owners, and community leaders to understand both the technical and social considerations. The resulting system, called StreetNav, processes the video from street cameras using computer vision techniques to provide real-time navigation assistance to BLV pedestrians.
The evaluations showed that StreetNav can guide users more precisely than GPS, but its performance is sensitive to environmental factors like occlusions and the distance from the camera. The researchers discuss the implications of deploying such a system at a larger scale.
Technical Explanation
The paper presents StreetNav, a system that leverages existing street cameras to provide precise outdoor navigation assistance for blind and low-vision (BLV) people. The researchers recognized that while prior work has enabled precise indoor navigation through specialized hardware installations, enabling this outdoors remains a challenge due to the unpredictable nature of outdoor environments.
Interestingly, the team noted that many outdoor spaces are already equipped with infrastructure like street cameras, which they hypothesized could be repurposed to assist BLV pedestrians. To explore this idea, they took a community-driven approach, engaging with various stakeholders including BLV users, residents, business owners, and community leaders to understand both the technical and sociotechnical considerations.
The resulting StreetNav system processes the video feed from street cameras using computer vision techniques to track the user's position and provide real-time navigation assistance. The researchers evaluated StreetNav's performance against GPS-based navigation, finding that it could guide users more precisely but was sensitive to environmental factors like occlusions and distance from the camera.
The paper discusses the implications of deploying such a system at scale, highlighting the need to address technical limitations around environmental sensitivity as well as potential sociotechnical challenges around privacy, trust, and equitable access.
Critical Analysis
The paper presents a novel and pragmatic approach to outdoor navigation assistance for BLV people by repurposing existing street camera infrastructure. The community-driven design process is commendable, as it helps ensure the system considers the needs and concerns of diverse stakeholders.
One potential limitation of the StreetNav system is its sensitivity to environmental factors like occlusions and distance from the camera. This could impact the reliability and consistency of the navigation assistance, especially in complex outdoor environments. The researchers acknowledge this issue and note the need to address it for broader deployment.
Another area for further exploration is the potential privacy and trust concerns that may arise from a system that leverages ubiquitous surveillance cameras. While the researchers engaged with the community, it would be valuable to dive deeper into how they plan to address these sociotechnical challenges and ensure the system is deployed equitably and with appropriate safeguards.
Additionally, the paper does not provide much detail on the specific computer vision techniques used in StreetNav or the underlying architecture. More technical insights into the system design and implementation would be helpful for readers interested in the technical aspects of the research.
Overall, the paper presents a promising approach to outdoor navigation assistance for BLV people, but further research is needed to address the identified limitations and explore the broader sociotechnical implications of such a system.
Conclusion
This paper explores the idea of repurposing existing street cameras to provide precise outdoor navigation assistance for blind and low-vision (BLV) people, an important challenge that has not been fully addressed by prior work.
The community-driven approach taken by the researchers is commendable, as it helps ensure the system considers the needs and concerns of diverse stakeholders. The resulting StreetNav system demonstrates the potential of leveraging ubiquitous infrastructure to enhance accessibility, guiding users more precisely than GPS-based navigation.
However, the system's sensitivity to environmental factors and the need to address potential privacy and trust concerns highlight the ongoing technical and sociotechnical challenges that must be addressed for successful large-scale deployment. Further research and collaboration with the BLV community will be crucial in refining the StreetNav system and paving the way for more accessible and equitable outdoor navigation solutions.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📊
0
StreetNav: Leveraging Street Cameras to Support Precise Outdoor Navigation for Blind Pedestrians
Gaurav Jain, Basel Hindi, Zihao Zhang, Koushik Srinivasula, Mingyu Xie, Mahshid Ghasemi, Daniel Weiner, Sophie Ana Paris, Xin Yi Therese Xu, Michael Malcolm, Mehmet Turkcan, Javad Ghaderi, Zoran Kostic, Gil Zussman, Brian A. Smith
Blind and low-vision (BLV) people rely on GPS-based systems for outdoor navigation. GPS's inaccuracy, however, causes them to veer off track, run into obstacles, and struggle to reach precise destinations. While prior work has made precise navigation possible indoors via hardware installations, enabling this outdoors remains a challenge. Interestingly, many outdoor environments are already instrumented with hardware such as street cameras. In this work, we explore the idea of repurposing existing street cameras for outdoor navigation. Our community-driven approach considers both technical and sociotechnical concerns through engagements with various stakeholders: BLV users, residents, business owners, and Community Board leadership. The resulting system, StreetNav, processes a camera's video feed using computer vision and gives BLV pedestrians real-time navigation assistance. Our evaluations show that StreetNav guides users more precisely than GPS, but its technical performance is sensitive to environmental occlusions and distance from the camera. We discuss future implications for deploying such systems at scale.
Read more7/31/2024

0
Generating Contextually-Relevant Navigation Instructions for Blind and Low Vision People
Zain Merchant, Abrar Anwar, Emily Wang, Souti Chattopadhyay, Jesse Thomason
Navigating unfamiliar environments presents significant challenges for blind and low-vision (BLV) individuals. In this work, we construct a dataset of images and goals across different scenarios such as searching through kitchens or navigating outdoors. We then investigate how grounded instruction generation methods can provide contextually-relevant navigational guidance to users in these instances. Through a sighted user study, we demonstrate that large pretrained language models can produce correct and useful instructions perceived as beneficial for BLV users. We also conduct a survey and interview with 4 BLV users and observe useful insights on preferences for different instructions based on the scenario.
Read more7/12/2024
0
A Dataset for Crucial Object Recognition in Blind and Low-Vision Individuals' Navigation
Md Touhidul Islam, Imran Kabir, Elena Ariel Pearce, Md Alimoor Reza, Syed Masum Billah
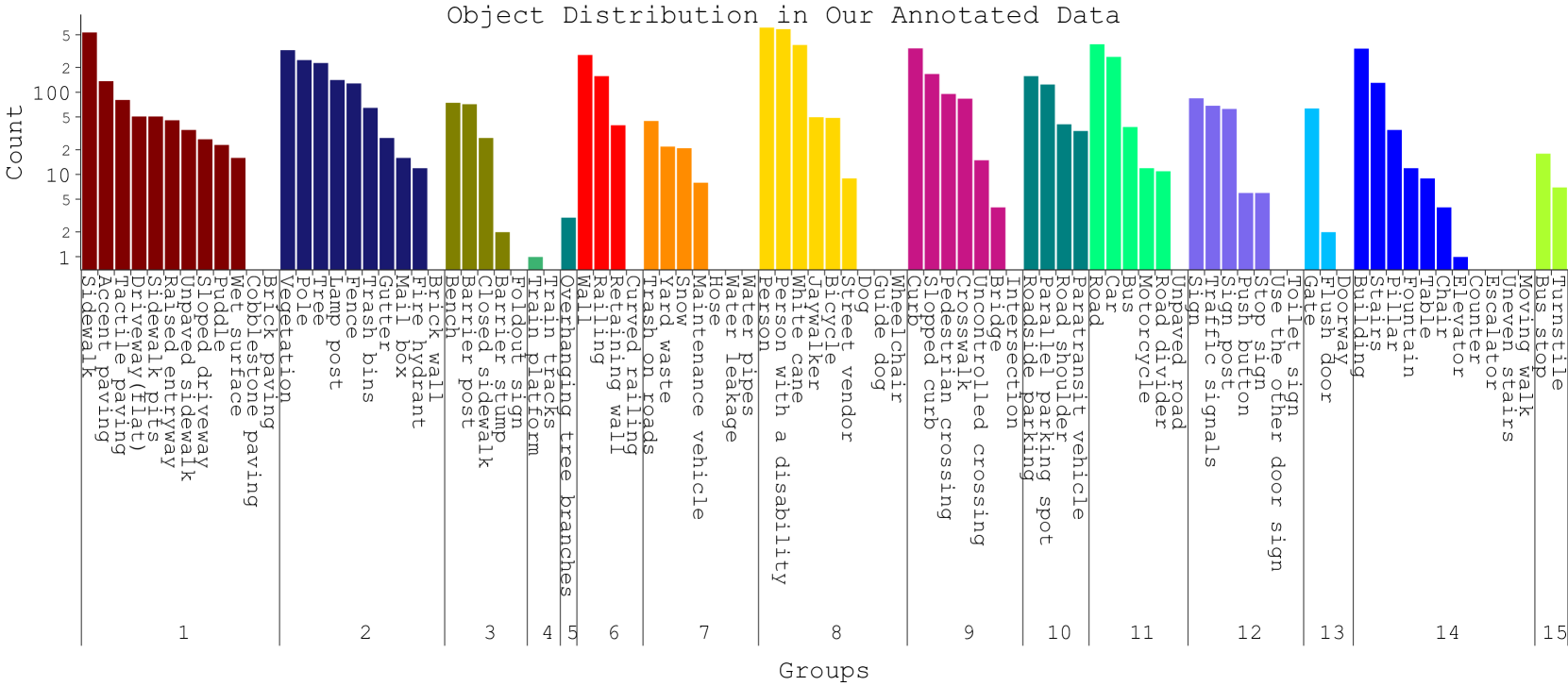
This paper introduces a dataset for improving real-time object recognition systems to aid blind and low-vision (BLV) individuals in navigation tasks. The dataset comprises 21 videos of BLV individuals navigating outdoor spaces, and a taxonomy of 90 objects crucial for BLV navigation, refined through a focus group study. We also provide object labeling for the 90 objects across 31 video segments created from the 21 videos. A deeper analysis reveals that most contemporary datasets used in training computer vision models contain only a small subset of the taxonomy in our dataset. Preliminary evaluation of state-of-the-art computer vision models on our dataset highlights shortcomings in accurately detecting key objects relevant to BLV navigation, emphasizing the need for specialized datasets. We make our dataset publicly available, offering valuable resources for developing more inclusive navigation systems for BLV individuals.
Read more7/25/2024

0
Identifying Crucial Objects in Blind and Low-Vision Individuals' Navigation
Md Touhidul Islam, Imran Kabir, Elena Ariel Pearce, Md Alimoor Reza, Syed Masum Billah
This paper presents a curated list of 90 objects essential for the navigation of blind and low-vision (BLV) individuals, encompassing road, sidewalk, and indoor environments. We develop the initial list by analyzing 21 publicly available videos featuring BLV individuals navigating various settings. Then, we refine the list through feedback from a focus group study involving blind, low-vision, and sighted companions of BLV individuals. A subsequent analysis reveals that most contemporary datasets used to train recent computer vision models contain only a small subset of the objects in our proposed list. Furthermore, we provide detailed object labeling for these 90 objects across 31 video segments derived from the original 21 videos. Finally, we make the object list, the 21 videos, and object labeling in the 31 video segments publicly available. This paper aims to fill the existing gap and foster the development of more inclusive and effective navigation aids for the BLV community.
Read more8/26/2024