Motion Planning for Hybrid Dynamical Systems: Framework, Algorithm Template, and a Sampling-based Approach
2406.01802
0
0
Abstract
This paper focuses on the motion planning problem for the systems exhibiting both continuous and discrete behaviors, which we refer to as hybrid dynamical systems. Firstly, the motion planning problem for hybrid systems is formulated using the hybrid equation framework, which is general to capture most hybrid systems. Secondly, a propagation algorithm template is proposed that describes a general framework to solve the motion planning problem for hybrid systems. Thirdly, a rapidly-exploring random trees (RRT) implementation of the proposed algorithm template is designed to solve the motion planning problem for hybrid systems. At each iteration, the proposed algorithm, called HyRRT, randomly picks a state sample and extends the search tree by flow or jump, which is also chosen randomly when both regimes are possible. Through a definition of concatenation of functions defined on hybrid time domains, we show that HyRRT is probabilistically complete, namely, the probability of failing to find a motion plan approaches zero as the number of iterations of the algorithm increases. This property is guaranteed under mild conditions on the data defining the motion plan, which include a relaxation of the usual positive clearance assumption imposed in the literature of classical systems. The motion plan is computed through the solution of two optimization problems, one associated with the flow and the other with the jumps of the system. The proposed algorithm is applied to an actuated bouncing ball system and a walking robot system so as to highlight its generality and computational features.
Create account to get full access
Overview
- This paper presents a framework and algorithm template for motion planning in hybrid dynamical systems, which are systems that combine continuous and discrete dynamics.
- The authors introduce a sampling-based approach to solve motion planning problems for hybrid systems, building on prior work on greedy heuristics, framework-guided motion planning, roadmaps and gaps over controllers, and neural randomized planning.
- The proposed approach aims to efficiently navigate the complex state space of hybrid systems, with potential applications in robotics, autonomous vehicles, and other domains involving hybrid dynamics.
Plain English Explanation
The paper focuses on the challenge of motion planning for hybrid dynamical systems, which are systems that combine continuous and discrete elements. For example, consider a robot that needs to navigate through a building. The robot's continuous motion (e.g., moving its wheels) is combined with discrete actions (e.g., opening and closing doors, pressing buttons).
The authors present a general framework and algorithm template to solve motion planning problems for these types of hybrid systems. The key idea is to use a sampling-based approach, which involves randomly sampling the system's state space and exploring different paths and transitions between the continuous and discrete components.
By building on prior work in areas like greedy heuristics, framework-guided motion planning, and neural randomized planning, the authors develop a more efficient and effective way to navigate the complex state space of hybrid systems. This could have important applications in robotics, autonomous vehicles, and other domains where systems exhibit both continuous and discrete dynamics.
Technical Explanation
The paper introduces a general framework and algorithm template for motion planning in hybrid dynamical systems. The authors build on prior work in areas like greedy heuristics, framework-guided motion planning, roadmaps and gaps over controllers, and neural randomized planning to develop a sampling-based approach for navigating the complex state space of hybrid systems.
The key components of the framework include:
- A state representation that captures both the continuous and discrete aspects of the system
- A transition model that describes how the system can transition between different continuous and discrete states
- A cost function that captures the objectives and constraints of the motion planning problem
The algorithm template follows a typical sampling-based planning approach, with the addition of handling the hybrid nature of the system. This involves sampling the continuous state space, generating feasible transitions between discrete modes, and searching for an optimal path that satisfies the given constraints and objectives.
The authors present a specific sampling-based algorithm based on this template and demonstrate its performance on several benchmark problems, showing its ability to efficiently navigate the complex state space of hybrid systems.
Critical Analysis
The paper presents a promising approach for motion planning in hybrid dynamical systems, but it also acknowledges several caveats and areas for further research.
One limitation is that the sampling-based approach may struggle in systems with high-dimensional or complex state spaces, as the algorithm's performance can degrade as the dimensionality increases. The authors suggest that combining their framework with other techniques, such as safe interval RRT or neural randomized planning, could help address this challenge.
Additionally, the paper does not provide a comprehensive analysis of the algorithm's theoretical properties, such as its completeness or optimality guarantees. Further research is needed to better understand the algorithm's theoretical foundations and its limitations.
Another potential issue is the reliance on accurate models of the hybrid system's dynamics and transitions. In real-world applications, these models may be imperfect or uncertain, which could impact the algorithm's performance. Exploring ways to handle model uncertainty or incorporate learning-based approaches could be a fruitful area for future work.
Overall, the paper presents a solid framework and algorithm template for motion planning in hybrid dynamical systems, but additional research is needed to address the identified limitations and to further explore the potential applications and implications of this work.
Conclusion
This paper introduces a framework and algorithm template for motion planning in hybrid dynamical systems, which are systems that combine continuous and discrete dynamics. The authors propose a sampling-based approach that builds on prior work in areas like greedy heuristics, framework-guided motion planning, and neural randomized planning.
The proposed approach aims to efficiently navigate the complex state space of hybrid systems, with potential applications in robotics, autonomous vehicles, and other domains involving hybrid dynamics. While the paper presents a promising solution, it also identifies several areas for further research, such as addressing high-dimensional state spaces, improving theoretical guarantees, and handling model uncertainty.
Overall, this work contributes to the ongoing efforts to develop effective motion planning strategies for hybrid dynamical systems, which are becoming increasingly important in a wide range of technological applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
A Survey on Hybrid Motion Planning Methods for Automated Driving Systems
MReza Alipour Sormoli, Konstantinos Koufos, Mehrdad Dianati, Roger Woodman
0
0
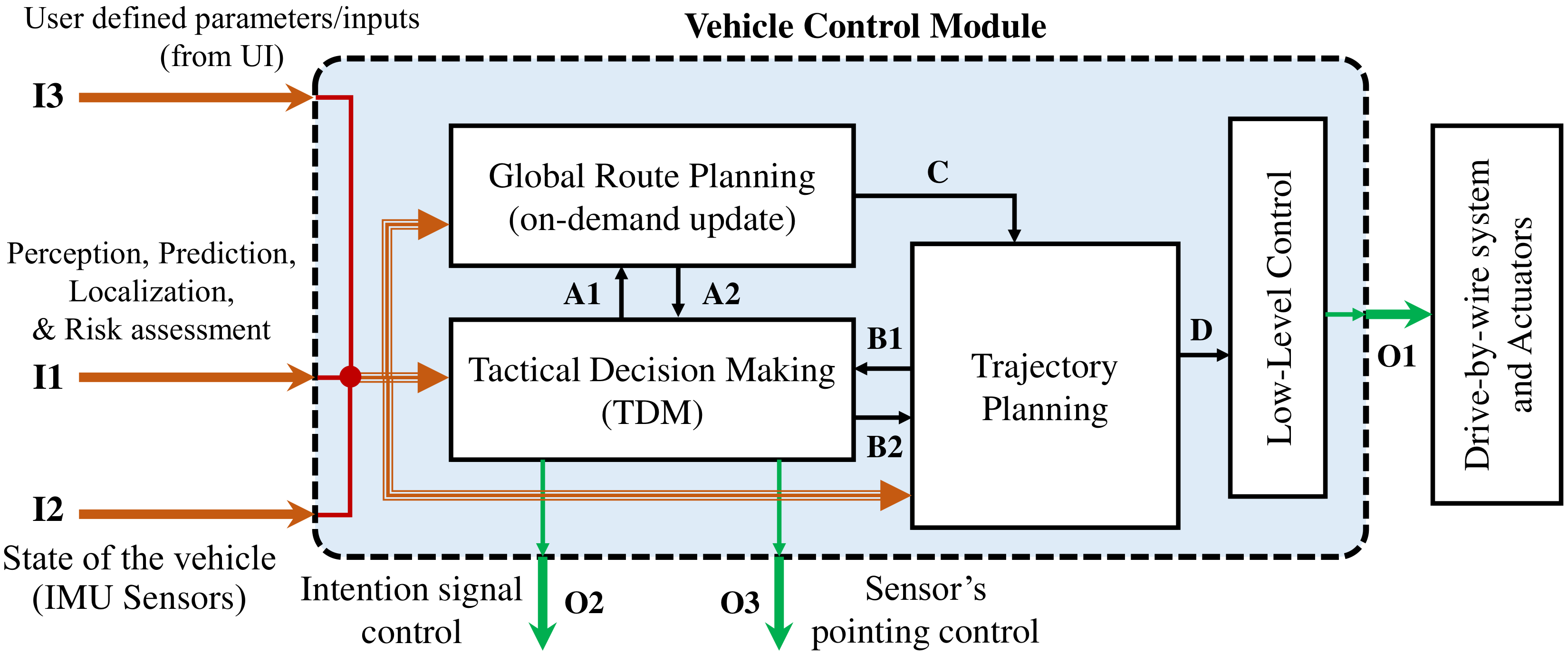
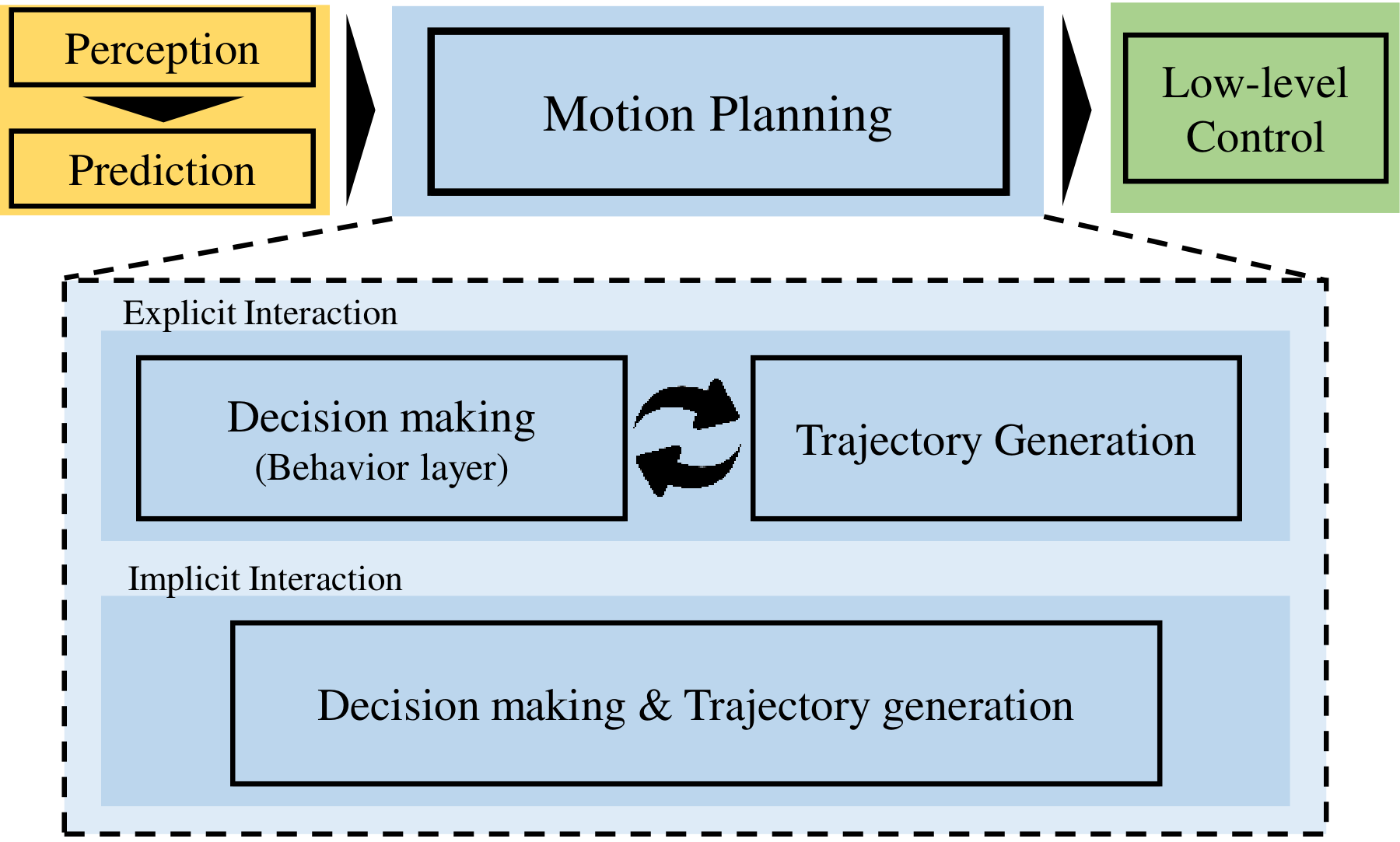
Motion planning is an essential element of the modular architecture of autonomous vehicles, serving as a bridge between upstream perception modules and downstream low-level control signals. Traditional motion planners were initially designed for specific Automated Driving Functions (ADFs), yet the evolving landscape of highly automated driving systems (ADS) requires motion for a wide range of ADFs, including unforeseen ones. This need has motivated the development of the ``hybrid approach in the literature, seeking to enhance motion planning performance by combining diverse techniques, such as data-driven (learning-based) and logic-driven (analytic) methodologies. Recent research endeavours have significantly contributed to the development of more efficient, accurate, and safe hybrid methods for Tactical Decision Making (TDM) and Trajectory Generation (TG), as well as integrating these algorithms into the motion planning module. Owing to the extensive variety and potential of hybrid methods, a timely and comprehensive review of the current literature is undertaken in this survey article. We classify the hybrid motion planners based on the types of components they incorporate, such as combinations of sampling-based with optimization-based/learning-based motion planners. The comparison of different classes is conducted by evaluating the addressed challenges and limitations, as well as assessing whether they focus on TG and/or TDM. We hope this approach will enable the researchers in this field to gain in-depth insights into the identification of current trends in hybrid motion planning and shed light on promising areas for future research.
6/11/2024
Towards A General-Purpose Motion Planning for Autonomous Vehicles Using Fluid Dynamics
MReza Alipour Sormoli, Konstantinos Koufos, Mehrdad Dianati, Roger Woodman
0
0
General-purpose motion planners for automated/autonomous vehicles promise to handle the task of motion planning (including tactical decision-making and trajectory generation) for various automated driving functions (ADF) in a diverse range of operational design domains (ODDs). The challenges of designing a general-purpose motion planner arise from several factors: a) A plethora of scenarios with different semantic information in each driving scene should be addressed, b) a strong coupling between long-term decision-making and short-term trajectory generation shall be taken into account, c) the nonholonomic constraints of the vehicle dynamics must be considered, and d) the motion planner must be computationally efficient to run in real-time. The existing methods in the literature are either limited to specific scenarios (logic-based) or are data-driven (learning-based) and therefore lack explainability, which is important for safety-critical automated driving systems (ADS). This paper proposes a novel general-purpose motion planning solution for ADS inspired by the theory of fluid mechanics. A computationally efficient technique, i.e., the lattice Boltzmann method, is then adopted to generate a spatiotemporal vector field, which in accordance with the nonholonomic dynamic model of the Ego vehicle is employed to generate feasible candidate trajectories. The trajectory optimising ride quality, efficiency and safety is finally selected to calculate the imminent control signals, i.e., throttle/brake and steering angle. The performance of the proposed approach is evaluated by simulations in highway driving, on-ramp merging, and intersection crossing scenarios, and it is found to outperform traditional motion planning solutions based on model predictive control (MPC).
6/11/2024
Hamilton-Jacobi Reachability Analysis for Hybrid Systems with Controlled and Forced Transitions
Javier Borquez, Shuang Peng, Yiyu Chen, Quan Nguyen, Somil Bansal
0
0
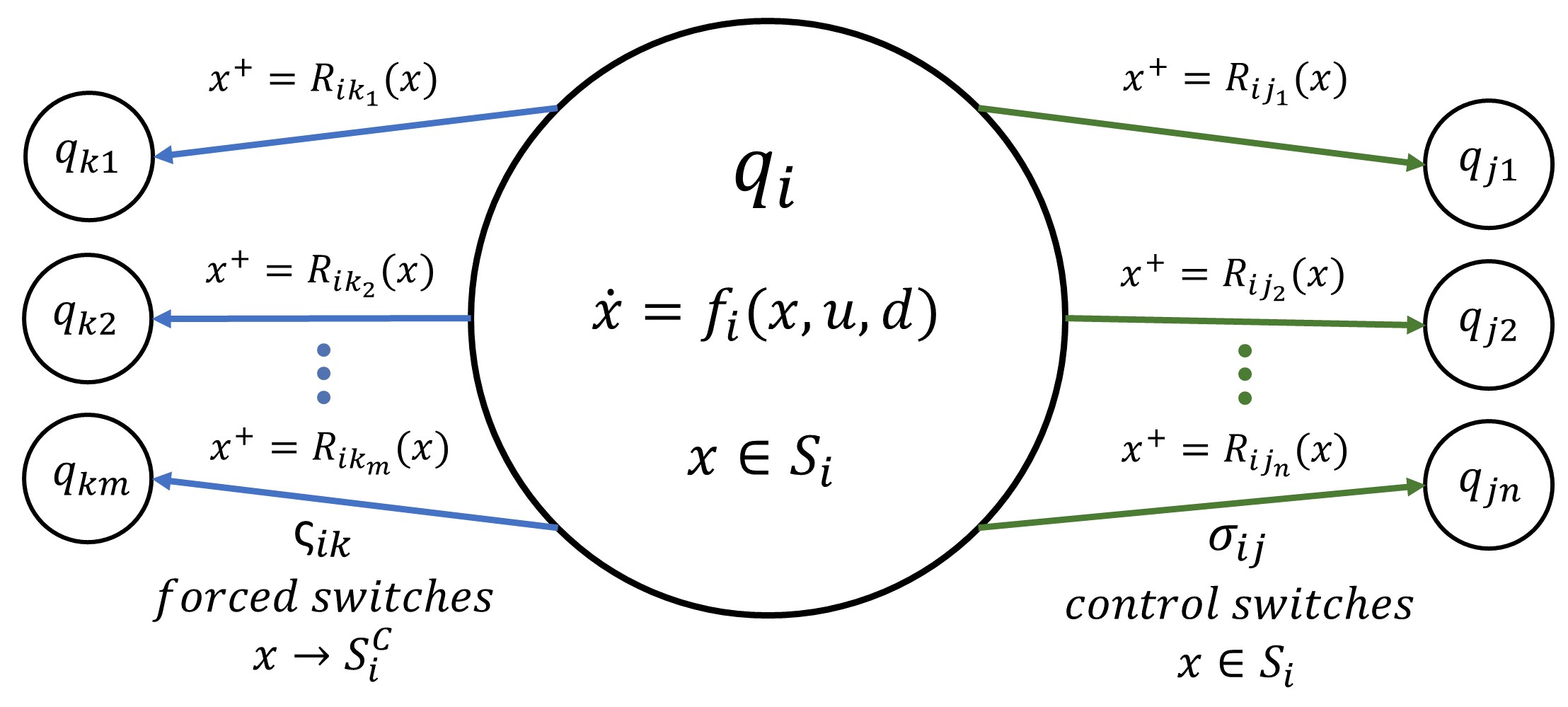
Hybrid dynamical systems with nonlinear dynamics are one of the most general modeling tools for representing robotic systems, especially contact-rich systems. However, providing guarantees regarding the safety or performance of nonlinear hybrid systems remains a challenging problem because it requires simultaneous reasoning about continuous state evolution and discrete mode switching. In this work, we address this problem by extending classical Hamilton-Jacobi (HJ) reachability analysis, a formal verification method for continuous-time nonlinear dynamical systems, to hybrid dynamical systems. We characterize the reachable sets for hybrid systems through a generalized value function defined over discrete and continuous states of the hybrid system. We also provide a numerical algorithm to compute this value function and obtain the reachable set. Our framework can compute reachable sets for hybrid systems consisting of multiple discrete modes, each with its own set of nonlinear continuous dynamics, discrete transitions that can be directly commanded or forced by a discrete control input, while still accounting for control bounds and adversarial disturbances in the state evolution. Along with the reachable set, the proposed framework also provides an optimal continuous and discrete controller to ensure system safety. We demonstrate our framework in several simulation case studies, as well as on a real-world testbed to solve the optimal mode planning problem for a quadruped with multiple gaits.
6/26/2024

Greedy Heuristics for Sampling-based Motion Planning in High-Dimensional State Spaces
Phone Thiha Kyaw, Anh Vu Le, Lim Yi, Prabakaran Veerajagadheswar, Mohan Rajesh Elara, Dinh Tung Vo, Minh Bui Vu
0
0
Sampling-based motion planning algorithms are very effective at finding solutions in high-dimensional continuous state spaces as they do not require prior approximations of the problem domain compared to traditional discrete graph-based searches. The anytime version of the Rapidly-exploring Random Trees (RRT) algorithm, denoted as RRT*, often finds high-quality solutions by incrementally approximating and searching the problem domain through random sampling. However, due to its low sampling efficiency and slow convergence rate, research has proposed many variants of RRT*, incorporating different heuristics and sampling strategies to overcome the constraints in complex planning problems. Yet, these approaches address specific convergence aspects of RRT* limitations, leaving a need for a sampling-based algorithm that can quickly find better solutions in complex high-dimensional state spaces with a faster convergence rate for practical motion planning applications. This article unifies and leverages the greedy search and heuristic techniques used in various RRT* variants to develop a greedy version of the anytime Rapidly-exploring Random Trees algorithm, denoted as Greedy RRT* (G-RRT*). It improves the initial solution-finding time of RRT* by maintaining two trees rooted at both the start and goal ends, advancing toward each other using greedy connection heuristics. It also accelerates the convergence rate of RRT* by introducing a greedy version of direct informed sampling procedure, which guides the sampling towards the promising region of the problem domain based on heuristics. We validate our approach on simulated planning problems, manipulation problems on Barrett WAM Arms, and on a self-reconfigurable robot, Panthera. Results show that G-RRT* produces asymptotically optimal solution paths and outperforms state-of-the-art RRT* variants, especially in high-dimensional planning problems.
5/7/2024