A Survey of Machine Learning Techniques for Improving Global Navigation Satellite Systems
2406.16873
0
0
🗣️
Abstract
Global Navigation Satellite Systems (GNSS)-based positioning plays a crucial role in various applications, including navigation, transportation, logistics, mapping, and emergency services. Traditional GNSS positioning methods are model-based and they utilize satellite geometry and the known properties of satellite signals. However, model-based methods have limitations in challenging environments and often lack adaptability to uncertain noise models. This paper highlights recent advances in Machine Learning (ML) and its potential to address these limitations. It covers a broad range of ML methods, including supervised learning, unsupervised learning, deep learning, and hybrid approaches. The survey provides insights into positioning applications related to GNSS such as signal analysis, anomaly detection, multi-sensor integration, prediction, and accuracy enhancement using ML. It discusses the strengths, limitations, and challenges of current ML-based approaches for GNSS positioning, providing a comprehensive overview of the field.
Create account to get full access
Overview
- This paper discusses the use of machine learning (ML) in Global Navigation Satellite Systems (GNSS)-based positioning, which is crucial for various applications such as navigation, transportation, and emergency services.
- Traditional GNSS positioning methods have limitations in challenging environments and often lack adaptability to uncertain noise models.
- The paper highlights how ML techniques, including supervised learning, unsupervised learning, deep learning, and hybrid approaches, can address these limitations.
- The survey covers a range of ML-based GNSS positioning applications, such as signal analysis, anomaly detection, multi-sensor integration, prediction, and accuracy enhancement.
- It discusses the strengths, limitations, and challenges of current ML-based approaches for GNSS positioning, providing a comprehensive overview of the field.
Plain English Explanation
GNSS, such as GPS, are widely used for navigation, tracking, and location-based services. Traditional GNSS positioning methods rely on mathematical models and the known properties of satellite signals. However, these methods can struggle in complex environments, like urban areas with tall buildings, and may not adapt well to unpredictable noise or interference.
This paper explores how machine learning can help address these limitations. Machine learning is a type of artificial intelligence that allows computers to learn patterns and make predictions from data, without being explicitly programmed.
The paper discusses various machine learning techniques, such as supervised learning, unsupervised learning, and deep learning, and how they can be applied to GNSS positioning. For example, machine learning models can be trained to analyze GNSS signals, detect anomalies, combine data from multiple sensors, make predictions, and enhance the accuracy of GNSS positioning.
By using machine learning, GNSS systems can become more adaptable and perform better in challenging environments. This can lead to improvements in navigation, transportation, mapping, and emergency response applications that rely on precise location information.
Technical Explanation
The paper presents a comprehensive survey of the use of machine learning (ML) techniques for GNSS-based positioning. Traditional GNSS positioning methods are model-based, utilizing satellite geometry and the known properties of satellite signals. However, these methods have limitations in complex environments and often lack adaptability to uncertain noise models.
The paper covers a broad range of ML approaches, including supervised learning, unsupervised learning, deep learning, and hybrid techniques. It explores how these ML methods can be applied to various GNSS positioning applications, such as:
- Signal analysis: ML models can be trained to analyze GNSS signal characteristics and extract relevant features for positioning.
- Anomaly detection: ML can be used to identify and mitigate the impact of signal anomalies or interference on GNSS positioning.
- Multi-sensor integration: ML techniques can fuse data from multiple sensors, such as GNSS, inertial measurement units, and cameras, to improve positioning accuracy.
- Prediction: ML models can learn patterns in GNSS data to predict future positions, which can enhance the robustness of GNSS-based positioning.
- Accuracy enhancement: ML algorithms can be used to correct or compensate for errors in GNSS positioning, leading to improved accuracy.
The paper discusses the strengths, limitations, and challenges of current ML-based approaches for GNSS positioning, providing a comprehensive overview of the field.
Critical Analysis
The paper presents a thorough review of the application of machine learning techniques to GNSS-based positioning, highlighting the potential benefits and limitations of these approaches. One key limitation mentioned is the need for large, diverse datasets to train effective ML models. In many real-world GNSS applications, such comprehensive datasets may not be readily available, which could hinder the deployment of ML-based solutions.
Additionally, the paper notes that the interpretability and explainability of ML models can be a challenge, especially for complex deep learning architectures. This can be a concern in safety-critical applications, where users may require a clear understanding of the decision-making process.
The paper also acknowledges that the performance of ML-based GNSS positioning can be influenced by factors such as environmental conditions, sensor quality, and the specific problem being addressed. Further research may be needed to identify the most appropriate ML techniques for different GNSS-based applications and to address any potential biases or limitations in the models.
Overall, the paper provides a valuable overview of the current state of ML-based GNSS positioning and highlights the need for continued research and development to fully realize the potential of these techniques in real-world settings.
Conclusion
This paper presents a comprehensive survey of the use of machine learning (ML) techniques for Global Navigation Satellite Systems (GNSS)-based positioning. It highlights how ML methods, including supervised learning, unsupervised learning, deep learning, and hybrid approaches, can address the limitations of traditional model-based GNSS positioning methods, particularly in challenging environments.
The paper covers a broad range of ML-based GNSS positioning applications, such as signal analysis, anomaly detection, multi-sensor integration, prediction, and accuracy enhancement. It discusses the strengths, limitations, and challenges of current ML-based approaches, providing a thorough overview of the field.
The findings in this paper suggest that the integration of ML with GNSS technology has the potential to significantly improve the performance and adaptability of positioning systems, with far-reaching implications for navigation, transportation, mapping, and emergency services. As the field continues to evolve, further research and development in this area may lead to even more advanced and robust GNSS-based solutions.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📈
Machine Learning in Orbit Estimation: a Survey
Francisco Caldas, Cl'audia Soares
0
0
Since the late 1950s, when the first artificial satellite was launched, the number of Resident Space Objects has steadily increased. It is estimated that around one million objects larger than one cm are currently orbiting the Earth, with only thirty thousand larger than ten cm being tracked. To avert a chain reaction of collisions, known as Kessler Syndrome, it is essential to accurately track and predict debris and satellites' orbits. Current approximate physics-based methods have errors in the order of kilometers for seven-day predictions, which is insufficient when considering space debris, typically with less than one meter. This failure is usually due to uncertainty around the state of the space object at the beginning of the trajectory, forecasting errors in environmental conditions such as atmospheric drag, and unknown characteristics such as the mass or geometry of the space object. Operators can enhance Orbit Prediction accuracy by deriving unmeasured objects' characteristics and improving non-conservative forces' effects by leveraging data-driven techniques, such as Machine Learning. In this survey, we provide an overview of the work in applying Machine Learning for Orbit Determination, Orbit Prediction, and atmospheric density modeling.
4/9/2024
Leveraging edge detection and neural networks for better UAV localization
Theo Di Piazza, Enric Meinhardt-Llopis, Gabriele Facciolo, Benedicte Bascle, Corentin Abgrall, Jean-Clement Devaux
0
0
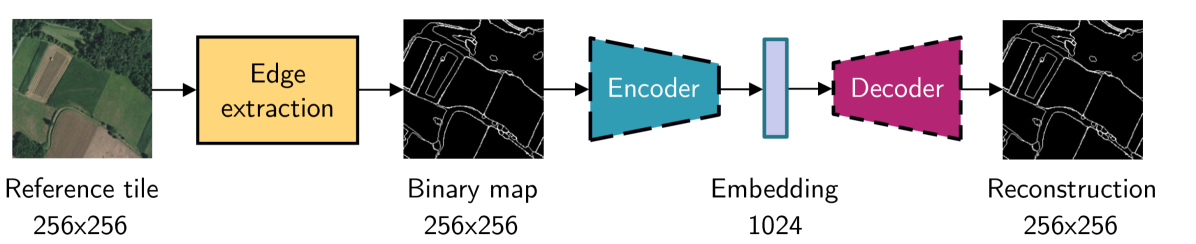
We propose a novel method for geolocalizing Unmanned Aerial Vehicles (UAVs) in environments lacking Global Navigation Satellite Systems (GNSS). Current state-of-the-art techniques employ an offline-trained encoder to generate a vector representation (embedding) of the UAV's current view, which is then compared with pre-computed embeddings of geo-referenced images to determine the UAV's position. Here, we demonstrate that the performance of these methods can be significantly enhanced by preprocessing the images to extract their edges, which exhibit robustness to seasonal and illumination variations. Furthermore, we establish that utilizing edges enhances resilience to orientation and altitude inaccuracies. Additionally, we introduce a confidence criterion for localization. Our findings are substantiated through synthetic experiments.
6/4/2024
Knowledge-guided Machine Learning: Current Trends and Future Prospects
Anuj Karpatne, Xiaowei Jia, Vipin Kumar
0
0
This paper presents an overview of scientific modeling and discusses the complementary strengths and weaknesses of ML methods for scientific modeling in comparison to process-based models. It also provides an introduction to the current state of research in the emerging field of scientific knowledge-guided machine learning (KGML) that aims to use both scientific knowledge and data in ML frameworks to achieve better generalizability, scientific consistency, and explainability of results. We discuss different facets of KGML research in terms of the type of scientific knowledge used, the form of knowledge-ML integration explored, and the method for incorporating scientific knowledge in ML. We also discuss some of the common categories of use cases in environmental sciences where KGML methods are being developed, using illustrative examples in each category.
5/3/2024
🛠️
Bayesian Simultaneous Localization and Multi-Lane Tracking Using Onboard Sensors and a SD Map
Yuxuan Xia, Erik Stenborg, Junsheng Fu, Gustaf Hendeby
0
0
High-definition map with accurate lane-level information is crucial for autonomous driving, but the creation of these maps is a resource-intensive process. To this end, we present a cost-effective solution to create lane-level roadmaps using only the global navigation satellite system (GNSS) and a camera on customer vehicles. Our proposed solution utilizes a prior standard-definition (SD) map, GNSS measurements, visual odometry, and lane marking edge detection points, to simultaneously estimate the vehicle's 6D pose, its position within a SD map, and also the 3D geometry of traffic lines. This is achieved using a Bayesian simultaneous localization and multi-object tracking filter, where the estimation of traffic lines is formulated as a multiple extended object tracking problem, solved using a trajectory Poisson multi-Bernoulli mixture (TPMBM) filter. In TPMBM filtering, traffic lines are modeled using B-spline trajectories, and each trajectory is parameterized by a sequence of control points. The proposed solution has been evaluated using experimental data collected by a test vehicle driving on highway. Preliminary results show that the traffic line estimates, overlaid on the satellite image, generally align with the lane markings up to some lateral offsets.
5/8/2024