Terrain-Aware Model Predictive Control of Heterogeneous Bipedal and Aerial Robot Coordination for Search and Rescue Tasks

0
Sign in to get full access
Overview
- The paper describes a terrain-aware model predictive control (MPC) approach for coordinating heterogeneous bipedal and aerial robots in search and rescue tasks.
- The proposed system allows the robots to navigate complex terrain, collaborate, and adapt to dynamic environments.
- The key contributions include a terrain-aware MPC formulation, a multi-agent coordination framework, and validation through simulations and experiments.
Plain English Explanation
The research paper presents a new way for two different types of robots - ones that walk on two legs (bipedal) and ones that fly (aerial) - to work together to perform search and rescue missions in challenging environments.
The researchers developed a [object Object] system that allows the robots to navigate rough terrain, collaborate with each other, and adapt to changing conditions. This means the robots can plan their movements ahead of time while accounting for the shape and features of the ground they are walking or flying over.
The key innovations include:
- A special control system that helps the robots understand and navigate different types of terrain
- A framework that enables the bipedal and aerial robots to coordinate their actions and work as a team
- Extensive testing through computer simulations and real-world experiments to validate the system's performance
Overall, this research aims to improve the capabilities of robotic search and rescue systems by allowing them to better navigate complex environments and collaborate effectively.
Technical Explanation
The paper presents a [object Object] approach for coordinating heterogeneous bipedal and aerial robots in search and rescue missions. The system uses a terrain map to plan the robots' movements, allowing them to navigate challenging environments.
The MPC formulation incorporates a terrain height map and robot-specific constraints to generate optimal trajectories for the bipedal and aerial robots. A multi-agent coordination framework enables the robots to collaborate and adapt their plans in response to dynamic changes.
The researchers validate their approach through simulations of various search and rescue scenarios, as well as real-world experiments with a bipedal robot and a quadrotor UAV. The results demonstrate the system's ability to navigate rough terrain, avoid obstacles, and coordinate the robots' actions effectively.
Critical Analysis
The paper presents a comprehensive solution for coordinating heterogeneous robots in search and rescue tasks, addressing important challenges such as terrain awareness and multi-agent collaboration. However, some potential limitations and areas for further research are worth noting:
-
The terrain map used in the MPC formulation is assumed to be known a priori, which may not always be the case in real-world scenarios. Integrating terrain estimation or SLAM (Simultaneous Localization and Mapping) techniques could enhance the system's adaptability.
-
The experiments were conducted in relatively controlled environments. Further testing in more complex, dynamic, and realistic search and rescue settings would help validate the system's robustness.
-
The coordination framework focuses on task-level planning and execution, but additional research may be needed to address lower-level control and sensing challenges for seamless interaction between the bipedal and aerial robots.
-
The paper does not provide a comprehensive analysis of the computational complexity and real-time performance of the proposed approach, which could be an important factor for practical deployment.
Despite these potential limitations, the [object Object] represents a significant advancement in the field of robotic search and rescue, with promising applications in disaster response and other challenging environments.
Conclusion
The research paper presents a terrain-aware model predictive control framework for coordinating heterogeneous bipedal and aerial robots in search and rescue tasks. The key innovations include a terrain-aware MPC formulation, a multi-agent coordination strategy, and extensive validation through simulations and experiments.
The proposed system demonstrates the ability to navigate complex terrain, collaborate effectively, and adapt to dynamic environments, which is crucial for improving the capabilities of robotic search and rescue systems. The critical analysis highlights potential areas for further research, such as integrating terrain estimation, testing in more realistic scenarios, and addressing lower-level control challenges.
Overall, this work represents an important step forward in the development of advanced robotic systems for emergency response and disaster relief operations, with the potential to enhance search and rescue efforts and save lives in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Terrain-Aware Model Predictive Control of Heterogeneous Bipedal and Aerial Robot Coordination for Search and Rescue Tasks
Abdulaziz Shamsah, Jesse Jiang, Ziwon Yoon, Samuel Coogan, Ye Zhao
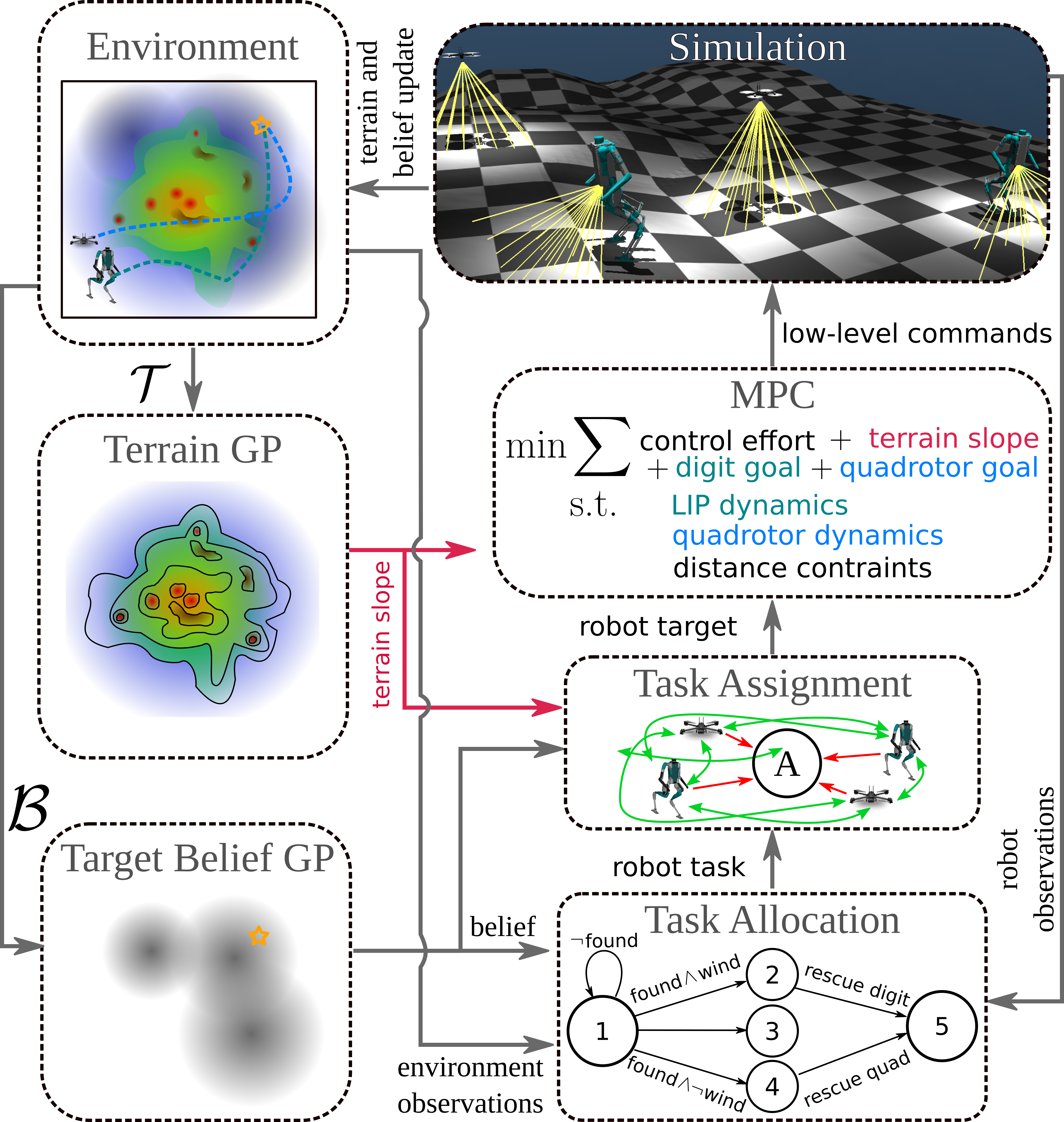
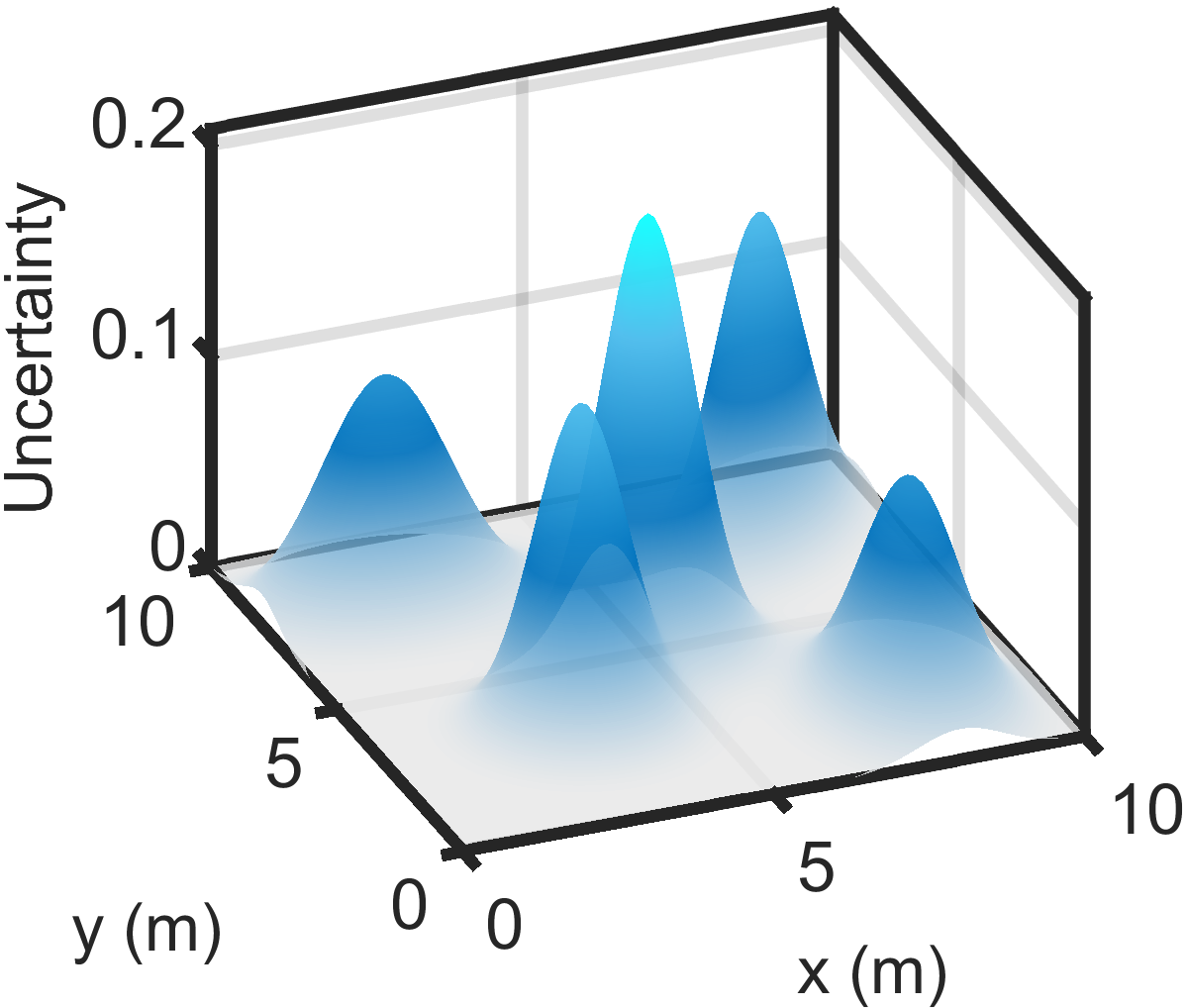
Humanoid robots offer significant advantages for search and rescue tasks, thanks to their capability to traverse rough terrains and perform transportation tasks. In this study, we present a task and motion planning framework for search and rescue operations using a heterogeneous robot team composed of humanoids and aerial robots. We propose a terrain-aware Model Predictive Controller (MPC) that incorporates terrain elevation gradients learned using Gaussian processes (GP). This terrain-aware MPC generates safe navigation paths for the bipedal robots to traverse rough terrain while minimizing terrain slopes, and it directs the quadrotors to perform aerial search and mapping tasks. The rescue subjects' locations are estimated by a target belief GP, which is updated online during the map exploration. A high-level planner for task allocation is designed by encoding the navigation tasks using syntactically cosafe Linear Temporal Logic (scLTL), and a consensus-based algorithm is designed for task assignment of individual robots. We evaluate the efficacy of our planning framework in simulation in an uncertain environment with various terrains and random rescue subject placements.
Read more9/24/2024
📈
0
Model Predictive Control for Aggressive Driving Over Uneven Terrain
Tyler Han, Alex Liu, Anqi Li, Alex Spitzer, Guanya Shi, Byron Boots
Terrain traversability in unstructured off-road autonomy has traditionally relied on semantic classification, resource-intensive dynamics models, or purely geometry-based methods to predict vehicle-terrain interactions. While inconsequential at low speeds, uneven terrain subjects our full-scale system to safety-critical challenges at operating speeds of 7--10 m/s. This study focuses particularly on uneven terrain such as hills, banks, and ditches. These common high-risk geometries are capable of disabling the vehicle and causing severe passenger injuries if poorly traversed. We introduce a physics-based framework for identifying traversability constraints on terrain dynamics. Using this framework, we derive two fundamental constraints, each with a focus on mitigating rollover and ditch-crossing failures while being fully parallelizable in the sample-based Model Predictive Control (MPC) framework. In addition, we present the design of our planning and control system, which implements our parallelized constraints in MPC and utilizes a low-level controller to meet the demands of our aggressive driving without prior information about the environment and its dynamics. Through real-world experimentation and traversal of hills and ditches, we demonstrate that our approach captures fundamental elements of safe and aggressive autonomy over uneven terrain. Our approach improves upon geometry-based methods by completing comprehensive off-road courses up to 22% faster while maintaining safe operation.
Read more6/11/2024
0
Model-Predictive Trajectory Generation for Autonomous Aerial Search and Coverage
Hugo Matias, Daniel Silvestre
This paper addresses the trajectory planning problem for search and coverage missions with an Unmanned Aerial Vehicle (UAV). The objective is to devise optimal coverage trajectories based on a utility map describing prior region information, assumed to be effectively approximated by a Gaussian Mixture Model (GMM). We introduce a Model Predictive Control (MPC) algorithm employing a relaxed formulation that promotes the exploration of the map by preventing the UAV from revisiting previously covered areas. This is achieved by penalizing intersections between the UAV's visibility regions along its trajectory. The algorithm is assessed in MATLAB and validated in Gazebo, as well as in outdoor experimental tests. The results show that the proposed strategy can generate efficient and smooth trajectories for search and coverage missions.
Read more4/8/2024

0
Learning Generic and Dynamic Locomotion of Humanoids Across Discrete Terrains
Shangqun Yu, Nisal Perera, Daniel Marew, Donghyun Kim
This paper addresses the challenge of terrain-adaptive dynamic locomotion in humanoid robots, a problem traditionally tackled by optimization-based methods or reinforcement learning (RL). Optimization-based methods, such as model-predictive control, excel in finding optimal reaction forces and achieving agile locomotion, especially in quadruped, but struggle with the nonlinear hybrid dynamics of legged systems and the real-time computation of step location, timing, and reaction forces. Conversely, RL-based methods show promise in navigating dynamic and rough terrains but are limited by their extensive data requirements. We introduce a novel locomotion architecture that integrates a neural network policy, trained through RL in simplified environments, with a state-of-the-art motion controller combining model-predictive control (MPC) and whole-body impulse control (WBIC). The policy efficiently learns high-level locomotion strategies, such as gait selection and step positioning, without the need for full dynamics simulations. This control architecture enables humanoid robots to dynamically navigate discrete terrains, making strategic locomotion decisions (e.g., walking, jumping, and leaping) based on ground height maps. Our results demonstrate that this integrated control architecture achieves dynamic locomotion with significantly fewer training samples than conventional RL-based methods and can be transferred to different humanoid platforms without additional training. The control architecture has been extensively tested in dynamic simulations, accomplishing terrain height-based dynamic locomotion for three different robots.
Read more7/30/2024