TF-SASM: Training-free Spatial-aware Sparse Memory for Multi-object Tracking

0

Sign in to get full access
Overview
- Presents a training-free sparse memory approach for multi-object tracking called TF-SASM
- Leverages spatial-aware sparse memory to enable efficient re-identification and tracking
- Avoids the need for complex training procedures common in many multi-object tracking methods
Plain English Explanation
The paper introduces a new approach for multi-object tracking called TF-SASM, which stands for "Training-free Spatial-aware Sparse Memory." The key idea is to use a sparse memory system that can efficiently store and retrieve object information, without requiring complex training procedures that are common in many multi-object tracking methods.
The sparse memory used in TF-SASM is "spatial-aware," meaning it keeps track of the physical locations of objects in the scene. This allows the system to quickly re-identify objects and maintain consistent tracking, even as they move around. By avoiding the need for extensive training, TF-SASM can be more flexible and adaptable to different tracking scenarios.
Technical Explanation
The TF-SASM system works by maintaining a sparse memory of object features and locations. When a new object is detected, its features and position are stored in the memory. As the object moves, its location in the memory is updated accordingly.
To perform tracking, TF-SASM uses an attention-based mechanism to efficiently search the sparse memory and re-identify objects. This attention-based approach allows the system to focus on the most relevant parts of the memory, rather than having to compare the new object to every entry. By leveraging the spatial information in the memory, TF-SASM can quickly locate and match objects, even as they move around the scene.
Importantly, TF-SASM does not require any complex training procedures. The sparse memory and attention-based tracking are implemented in a training-free manner, making the system more flexible and adaptable compared to many other multi-object tracking methods that rely on extensive training.
Critical Analysis
The paper presents a novel and promising approach to multi-object tracking with several potential advantages. The use of a spatial-aware sparse memory and attention-based tracking appears to be an effective way to enable efficient re-identification and maintain consistent object tracking.
One potential limitation of the TF-SASM approach is that it may not be as robust to occlusions or other complex tracking scenarios as some more advanced methods that utilize deeper learning models. The paper does not explicitly address how the system would handle these types of challenges.
Additionally, while the training-free nature of TF-SASM is a strength, it may also limit the system's ability to adapt to more complex or dynamic environments where some degree of learning or adaptation could be beneficial.
Overall, the TF-SASM approach presents an interesting and innovative solution for multi-object tracking, with potential for further development and refinement to address some of the potential limitations.
Conclusion
The TF-SASM paper introduces a novel, training-free approach to multi-object tracking that leverages a spatial-aware sparse memory and attention-based tracking mechanisms. This allows for efficient re-identification and consistent tracking, without the need for complex training procedures.
While the paper presents a promising solution, there are some potential limitations that could be addressed through further research and development. Overall, the TF-SASM approach offers an interesting and innovative alternative to many existing multi-object tracking methods, with the potential to impact the field and lead to more flexible and adaptable tracking systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
TF-SASM: Training-free Spatial-aware Sparse Memory for Multi-object Tracking
Thuc Nguyen-Quang, Minh-Triet Tran
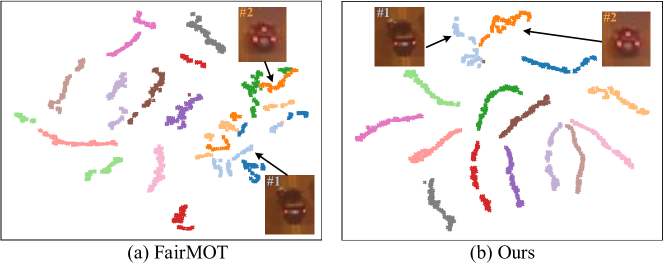
Multi-object tracking (MOT) in computer vision remains a significant challenge, requiring precise localization and continuous tracking of multiple objects in video sequences. The emergence of data sets that emphasize robust reidentification, such as DanceTrack, has highlighted the need for effective solutions. While memory-based approaches have shown promise, they often suffer from high computational complexity and memory usage due to storing feature at every single frame. In this paper, we propose a novel memory-based approach that selectively stores critical features based on object motion and overlapping awareness, aiming to enhance efficiency while minimizing redundancy. As a result, our method not only store longer temporal information with limited number of stored features in the memory, but also diversify states of a particular object to enhance the association performance. Our approach significantly improves over MOTRv2 in the DanceTrack test set, demonstrating a gain of 2.0% AssA score and 2.1% in IDF1 score.
Read more7/16/2024
0
Spatial-Temporal Multi-level Association for Video Object Segmentation
Deshui Miao, Xin Li, Zhenyu He, Huchuan Lu, Ming-Hsuan Yang
Existing semi-supervised video object segmentation methods either focus on temporal feature matching or spatial-temporal feature modeling. However, they do not address the issues of sufficient target interaction and efficient parallel processing simultaneously, thereby constraining the learning of dynamic, target-aware features. To tackle these limitations, this paper proposes a spatial-temporal multi-level association framework, which jointly associates reference frame, test frame, and object features to achieve sufficient interaction and parallel target ID association with a spatial-temporal memory bank for efficient video object segmentation. Specifically, we construct a spatial-temporal multi-level feature association module to learn better target-aware features, which formulates feature extraction and interaction as the efficient operations of object self-attention, reference object enhancement, and test reference correlation. In addition, we propose a spatial-temporal memory to assist feature association and temporal ID assignment and correlation. We evaluate the proposed method by conducting extensive experiments on numerous video object segmentation datasets, including DAVIS 2016/2017 val, DAVIS 2017 test-dev, and YouTube-VOS 2018/2019 val. The favorable performance against the state-of-the-art methods demonstrates the effectiveness of our approach. All source code and trained models will be made publicly available.
Read more4/10/2024
0
STCMOT: Spatio-Temporal Cohesion Learning for UAV-Based Multiple Object Tracking
Jianbo Ma, Chuanming Tang, Fei Wu, Can Zhao, Jianlin Zhang, Zhiyong Xu
Multiple object tracking (MOT) in Unmanned Aerial Vehicle (UAV) videos is important for diverse applications in computer vision. Current MOT trackers rely on accurate object detection results and precise matching of target reidentification (ReID). These methods focus on optimizing target spatial attributes while overlooking temporal cues in modelling object relationships, especially for challenging tracking conditions such as object deformation and blurring, etc. To address the above-mentioned issues, we propose a novel Spatio-Temporal Cohesion Multiple Object Tracking framework (STCMOT), which utilizes historical embedding features to model the representation of ReID and detection features in a sequential order. Concretely, a temporal embedding boosting module is introduced to enhance the discriminability of individual embedding based on adjacent frame cooperation. While the trajectory embedding is then propagated by a temporal detection refinement module to mine salient target locations in the temporal field. Extensive experiments on the VisDrone2019 and UAVDT datasets demonstrate our STCMOT sets a new state-of-the-art performance in MOTA and IDF1 metrics. The source codes are released at https://github.com/ydhcg-BoBo/STCMOT.
Read more9/18/2024

0
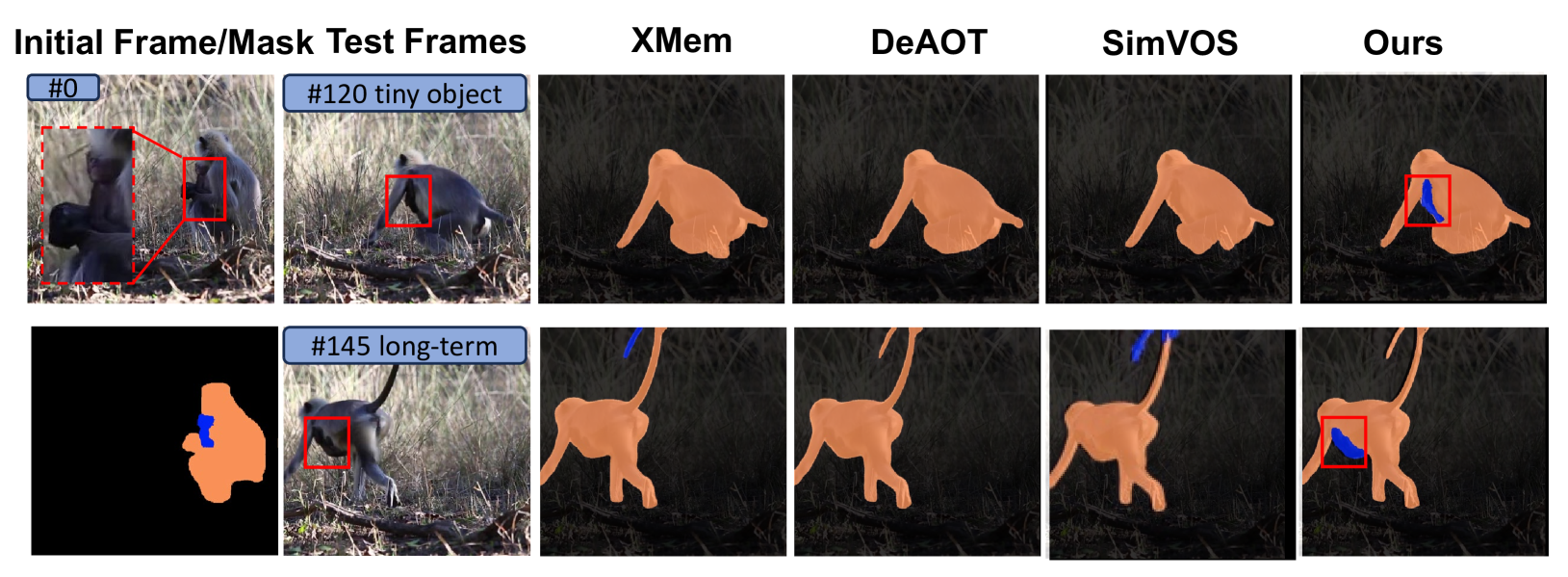
Learning Spatial-Semantic Features for Robust Video Object Segmentation
Xin Li, Deshui Miao, Zhenyu He, Yaowei Wang, Huchuan Lu, Ming-Hsuan Yang
Tracking and segmenting multiple similar objects with complex or separate parts in long-term videos is inherently challenging due to the ambiguity of target parts and identity confusion caused by occlusion, background clutter, and long-term variations. In this paper, we propose a robust video object segmentation framework equipped with spatial-semantic features and discriminative object queries to address the above issues. Specifically, we construct a spatial-semantic network comprising a semantic embedding block and spatial dependencies modeling block to associate the pretrained ViT features with global semantic features and local spatial features, providing a comprehensive target representation. In addition, we develop a masked cross-attention module to generate object queries that focus on the most discriminative parts of target objects during query propagation, alleviating noise accumulation and ensuring effective long-term query propagation. The experimental results show that the proposed method set a new state-of-the-art performance on multiple datasets, including the DAVIS2017 test (89.1%), YoutubeVOS 2019 (88.5%), MOSE (75.1%), LVOS test (73.0%), and LVOS val (75.1%), which demonstrate the effectiveness and generalization capacity of the proposed method. We will make all source code and trained models publicly available.
Read more7/11/2024