Adaptive LiDAR-Radar Fusion for Outdoor Odometry Across Dense Smoke Conditions
2403.17441
0
0

Abstract
Robust odometry estimation in perceptually degraded environments represents a key challenge in the field of robotics. In this paper, we propose a LiDAR-radar fusion method for robust odometry for adverse environment with LiDAR degeneracy. By comparing the LiDAR point cloud with the radar static point cloud obtained through preprocessing module, it is possible to identify instances of LiDAR degeneracy to overcome perceptual limits. We demonstrate the effectiveness of our method in challenging conditions such as dense smoke, showcasing its ability to reliably estimate odometry and identify/remove dynamic points prone to LiDAR degeneracy.
Create account to get full access
Overview
- This paper presents an adaptive LiDAR-radar fusion method for outdoor odometry in dense smoke conditions.
- The method combines data from LiDAR (light detection and ranging) and radar sensors to estimate the robot's position and orientation, even in challenging environments with poor visibility.
- The approach dynamically adjusts the fusion process based on the quality of the sensor data, improving the overall odometry performance.
Plain English Explanation
The researchers developed a system that combines data from two different types of sensors - LiDAR and radar - to help a robot or vehicle keep track of its location and orientation, even in situations where visibility is very poor, such as when there is dense smoke in the environment. LiDAR sensors use light to detect and measure distances, while radar uses radio waves.
The key idea is that the system can adapt the way it fuses the data from these two sensors, depending on how reliable the information from each one is at any given time. This helps to maintain accurate odometry (the process of estimating a robot's position and orientation) even when one of the sensors is not working as well, such as when the LiDAR can't see through the smoke. By dynamically adjusting the fusion process, the system can provide robust odometry in challenging conditions.
Technical Explanation
The paper presents an adaptive LiDAR-radar fusion approach for outdoor odometry in environments with dense smoke. The method combines data from a LiDAR sensor and a radar sensor to estimate the robot's 2D localization and orientation.
The fusion process is tightly coupled, with the relative weights of the LiDAR and radar data adaptively adjusted based on the quality of the sensor measurements. This helps maintain accurate odometry even when one sensor is performing poorly, such as when the LiDAR is unable to reliably detect features in the dense smoke.
The paper also explores the use of point cloud super-resolution techniques to enhance the LiDAR data and improve the overall fusion performance.
Critical Analysis
The paper highlights the challenges of maintaining robust odometry in adverse environmental conditions and demonstrates a promising solution using adaptive LiDAR-radar fusion. However, the authors acknowledge that the approach has some limitations, such as the need for accurate sensor calibration and the potential impact of sensor degradation over time.
Additionally, the versatility of the method in handling other sensor modalities, such as inertial measurement units (IMUs) or wheel odometry, is not extensively explored in this work. Further research could investigate the integration of additional sensor inputs to enhance the robustness and flexibility of the odometry system.
Conclusion
This research presents an adaptive LiDAR-radar fusion approach that can maintain accurate outdoor odometry in challenging environments with dense smoke. By dynamically adjusting the fusion process based on sensor data quality, the system can provide robust localization and orientation estimation, even when one of the sensors is not performing optimally. The method has the potential to improve the reliability of autonomous navigation in hazardous or low-visibility conditions, with further research needed to explore its integration with other sensor modalities and its real-world performance.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📶
Advancements in Radar Odometry
Matteo Frosi, Mirko Usuelli, Matteo Matteucci
0
0
Radar odometry estimation has emerged as a critical technique in the field of autonomous navigation, providing robust and reliable motion estimation under various environmental conditions. Despite its potential, the complex nature of radar signals and the inherent challenges associated with processing these signals have limited the widespread adoption of this technology. This paper aims to address these challenges by proposing novel improvements to an existing method for radar odometry estimation, designed to enhance accuracy and reliability in diverse scenarios. Our pipeline consists of filtering, motion compensation, oriented surface points computation, smoothing, one-to-many radar scan registration, and pose refinement. The developed method enforces local understanding of the scene, by adding additional information through smoothing techniques, and alignment of consecutive scans, as a refinement posterior to the one-to-many registration. We present an in-depth investigation of the contribution of each improvement to the localization accuracy, and we benchmark our system on the sequences of the main datasets for radar understanding, i.e., the Oxford Radar RobotCar, MulRan, and Boreas datasets. The proposed pipeline is able to achieve superior results, on all scenarios considered and under harsh environmental constraints.
4/8/2024

2DLIW-SLAM:2D LiDAR-Inertial-Wheel Odometry with Real-Time Loop Closure
Bin Zhang, Zexin Peng, Bi Zeng, Junjie Lu
0
0
Due to budgetary constraints, indoor navigation typically employs 2D LiDAR rather than 3D LiDAR. However, the utilization of 2D LiDAR in Simultaneous Localization And Mapping (SLAM) frequently encounters challenges related to motion degeneracy, particularly in geometrically similar environments. To address this problem, this paper proposes a robust, accurate, and multi-sensor-fused 2D LiDAR SLAM system specifically designed for indoor mobile robots. To commence, the original LiDAR data undergoes meticulous processing through point and line extraction. Leveraging the distinctive characteristics of indoor environments, line-line constraints are established to complement other sensor data effectively, thereby augmenting the overall robustness and precision of the system. Concurrently, a tightly-coupled front-end is created, integrating data from the 2D LiDAR, IMU, and wheel odometry, thus enabling real-time state estimation. Building upon this solid foundation, a novel global feature point matching-based loop closure detection algorithm is proposed. This algorithm proves highly effective in mitigating front-end accumulated errors and ultimately constructs a globally consistent map. The experimental results indicate that our system fully meets real-time requirements. When compared to Cartographer, our system not only exhibits lower trajectory errors but also demonstrates stronger robustness, particularly in degeneracy problem.
4/24/2024
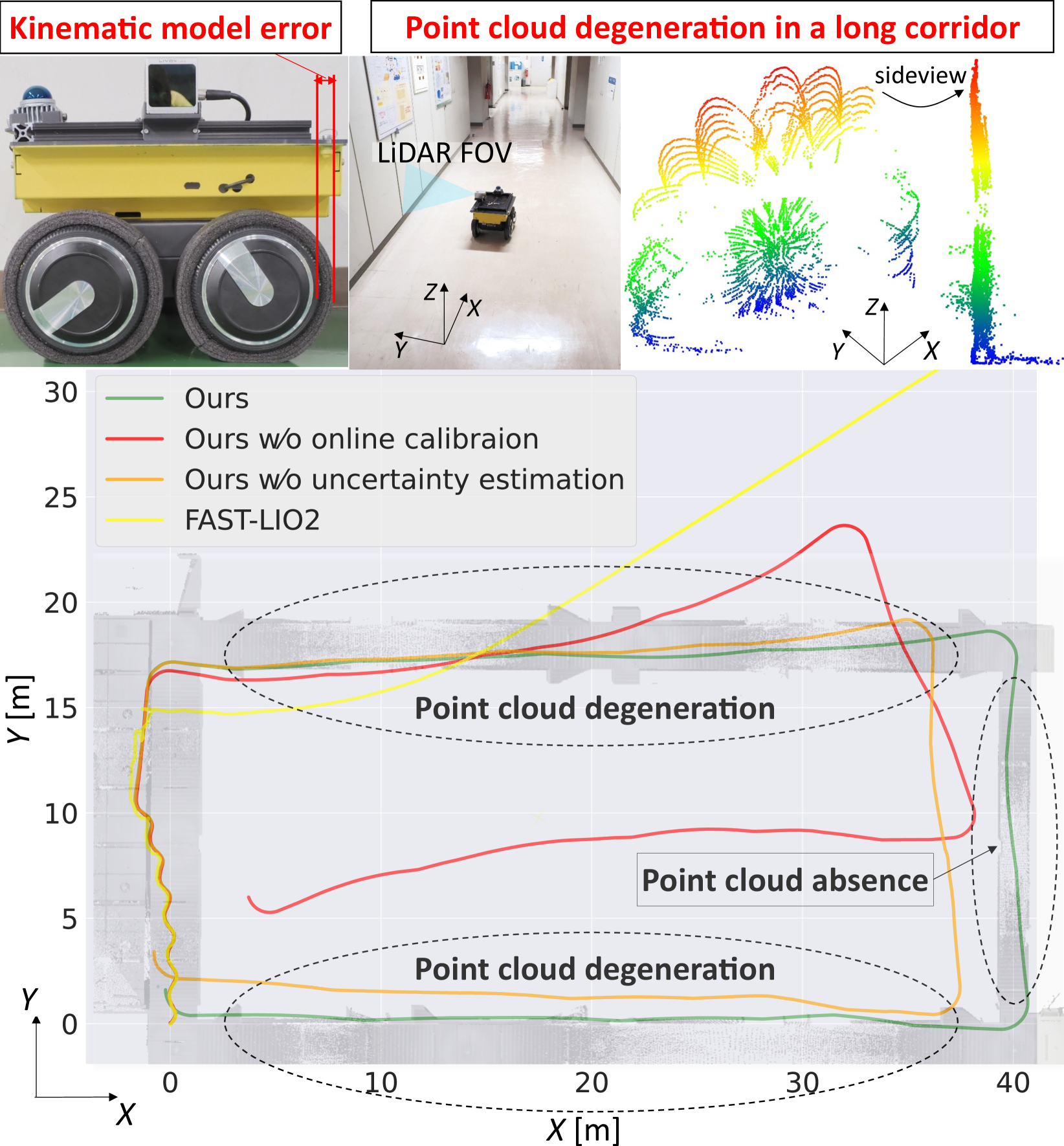
Tightly-Coupled LiDAR-IMU-Wheel Odometry with Online Calibration of a Kinematic Model for Skid-Steering Robots
Taku Okawara, Kenji Koide, Shuji Oishi, Masashi Yokozuka, Atsuhiko Banno, Kentaro Uno, Kazuya Yoshida
0
0
Tunnels and long corridors are challenging environments for mobile robots because a LiDAR point cloud should degenerate in these environments. To tackle point cloud degeneration, this study presents a tightly-coupled LiDAR-IMU-wheel odometry algorithm with an online calibration for skid-steering robots. We propose a full linear wheel odometry factor, which not only serves as a motion constraint but also performs the online calibration of kinematic models for skid-steering robots. Despite the dynamically changing kinematic model (e.g., wheel radii changes caused by tire pressures) and terrain conditions, our method can address the model error via online calibration. Moreover, our method enables an accurate localization in cases of degenerated environments, such as long and straight corridors, by calibration while the LiDAR-IMU fusion sufficiently operates. Furthermore, we estimate the uncertainty (i.e., covariance matrix) of the wheel odometry online for creating a reasonable constraint. The proposed method is validated through three experiments. The first indoor experiment shows that the proposed method is robust in severe degeneracy cases (long corridors) and changes in the wheel radii. The second outdoor experiment demonstrates that our method accurately estimates the sensor trajectory despite being in rough outdoor terrain owing to online uncertainty estimation of wheel odometry. The third experiment shows the proposed online calibration enables robust odometry estimation in changing terrains.
4/4/2024
🎲
Radarize: Enhancing Radar SLAM with Generalizable Doppler-Based Odometry
Emerson Sie, Xinyu Wu, Heyu Guo, Deepak Vasisht
0
0
Millimeter-wave (mmWave) radar is increasingly being considered as an alternative to optical sensors for robotic primitives like simultaneous localization and mapping (SLAM). While mmWave radar overcomes some limitations of optical sensors, such as occlusions, poor lighting conditions, and privacy concerns, it also faces unique challenges, such as missed obstacles due to specular reflections or fake objects due to multipath. To address these challenges, we propose Radarize, a self-contained SLAM pipeline that uses only a commodity single-chip mmWave radar. Our radar-native approach uses techniques such as Doppler shift-based odometry and multipath artifact suppression to improve performance. We evaluate our method on a large dataset of 146 trajectories spanning 4 buildings and mounted on 3 different platforms, totaling approximately 4.7 Km of travel distance. Our results show that our method outperforms state-of-the-art radar and radar-inertial approaches by approximately 5x in terms of odometry and 8x in terms of end-to-end SLAM, as measured by absolute trajectory error (ATE), without the need for additional sensors such as IMUs or wheel encoders.
4/30/2024