Timing Analysis and Priority-driven Enhancements of ROS 2 Multi-threaded Executors

0

Sign in to get full access
Overview
- The paper presents a timing analysis and priority-driven enhancements of the ROS 2 multi-threaded executors.
- ROS 2 is a popular robotics middleware that has become increasingly important for real-time applications.
- This work aims to improve the performance and predictability of ROS 2 by addressing issues with its multi-threaded executors.
Plain English Explanation
The paper discusses ways to improve the ROS 2 middleware, which is widely used in robotics. ROS 2 allows different software components to work together, but it can sometimes struggle to handle tasks that need to be completed quickly and predictably, especially when using multiple processing threads.
The researchers analyzed the timing behavior of the ROS 2 multi-threaded executors, which are the parts of the system responsible for scheduling and running different tasks. They found some areas for improvement, such as the way tasks are prioritized and the overhead caused by switching between threads.
To address these issues, the researchers developed priority-driven enhancements to the ROS 2 executors. These changes allow the system to more effectively handle tasks with different levels of importance, helping to ensure that critical actions are completed on time.
The goal is to make ROS 2 more suitable for real-time applications, where predictable performance is essential, such as multi-robot systems or edge computing scenarios. By improving the timing behavior and scheduling of the ROS 2 executors, the researchers aim to enhance the overall reliability and responsiveness of ROS 2-based systems.
Technical Explanation
The paper presents a timing analysis of the ROS 2 multi-threaded executors and proposes priority-driven enhancements to improve their performance and predictability.
The authors first analyze the timing behavior of the ROS 2 executors, focusing on the overhead caused by thread switching and the lack of fine-grained task prioritization. They identify several areas for improvement, such as the way tasks are scheduled and the impact of preemption on execution time.
To address these issues, the researchers develop a set of priority-driven enhancements to the ROS 2 executors. These changes include:
-
Priority-based Scheduling: The executors are modified to schedule tasks based on their priority, ensuring that higher-priority tasks are executed in a timely manner.
-
Preemption Handling: The preemption logic is improved to minimize the impact of higher-priority tasks interrupting the execution of lower-priority tasks.
-
Reduced Thread Switching: The number of thread switches is reduced by optimizing the task scheduling and execution.
The researchers evaluate the performance of their enhanced ROS 2 executors using both synthetic benchmarks and real-world scenarios. They demonstrate significant improvements in terms of task completion times, reduced jitter, and better overall responsiveness compared to the standard ROS 2 implementation.
Critical Analysis
The paper presents a well-designed and thorough analysis of the ROS 2 multi-threaded executors, identifying specific areas for improvement and proposing effective solutions. The priority-driven enhancements developed by the researchers are a significant contribution to the ROS 2 ecosystem, as they address important performance and predictability issues that have been limiting the use of ROS 2 in real-time applications.
However, the paper could have benefited from a more in-depth discussion of the potential limitations and trade-offs of the proposed enhancements. For example, it would have been valuable to explore the impact of the priority-based scheduling on overall system responsiveness, particularly in scenarios with a large number of tasks or complex task dependencies.
Additionally, the paper does not provide a comprehensive comparison to other approaches for improving the real-time performance of ROS 2, such as the use of real-time operating systems or the integration of hardware acceleration. Exploring how the proposed enhancements could be combined with or complement these other techniques would strengthen the overall contribution of the work.
Conclusion
The paper presents an important contribution to the ROS 2 ecosystem by addressing critical performance and predictability issues with the multi-threaded executors. The proposed priority-driven enhancements demonstrate significant improvements in task completion times, reduced jitter, and better overall responsiveness, making ROS 2 more suitable for real-time applications in robotics and beyond.
The work highlights the importance of optimizing the underlying middleware infrastructure to support the increasing demands of modern robotic systems. By continuing to refine and enhance the core components of ROS 2, researchers and developers can help ensure that this powerful robotics framework remains a reliable and efficient choice for a wide range of real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Timing Analysis and Priority-driven Enhancements of ROS 2 Multi-threaded Executors
Hoora Sobhani, Hyunjong Choi, Hyoseung Kim
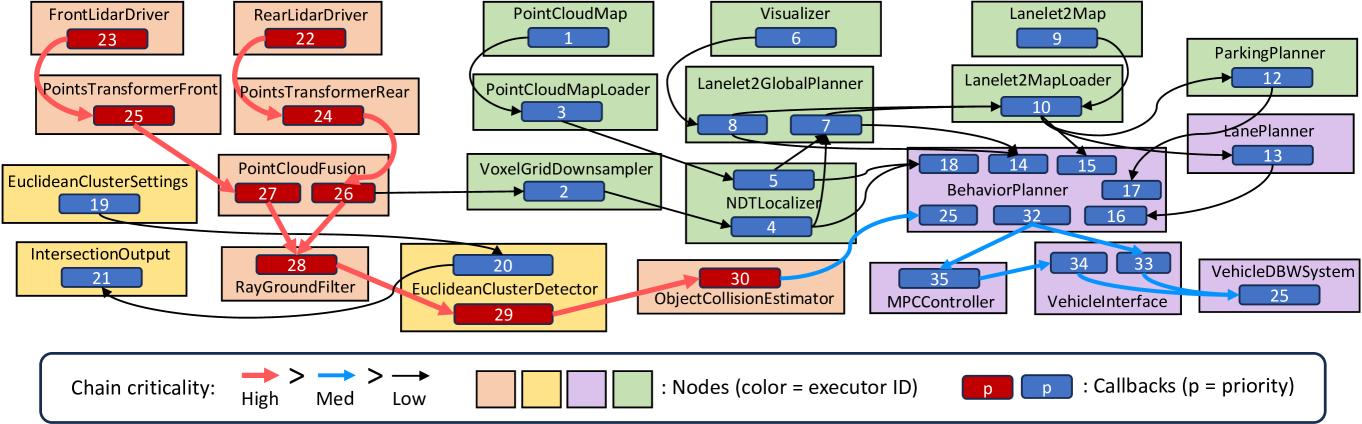
The second generation of Robotic Operating System, ROS 2, has gained much attention for its potential to be used for safety-critical robotic applications. The need to provide a solid foundation for timing correctness and scheduling mechanisms is therefore growing rapidly. Although there are some pioneering studies conducted on formally analyzing the response time of processing chains in ROS 2, the focus has been limited to single-threaded executors, and multi-threaded executors, despite their advantages, have not been studied well. To fill this knowledge gap, in this paper, we propose a comprehensive response-time analysis framework for chains running on ROS 2 multi-threaded executors. We first analyze the timing behavior of the default scheduling scheme in ROS 2 multi-threaded executors, and then present priority-driven scheduling enhancements to address the limitations of the default scheme. Our framework can analyze chains with both arbitrary and constrained deadlines and also the effect of mutually-exclusive callback groups. Evaluation is conducted by a case study on NVIDIA Jetson AGX Xavier and schedulability experiments using randomly-generated chains. The results demonstrate that our analysis framework can safely upper-bound response times under various conditions and the priority-driven scheduling enhancements not only reduce the response time of critical chains but also improve analytical bounds.
Read more8/19/2024

0
Bridging the Gap between ROS~2 and Classical Real-Time Scheduling for Periodic Tasks
Harun Teper, Oren Bell, Mario Gunzel, Chris Gill, Jian-Jia Chen
The Robot Operating System 2 (ROS~2) is a widely used middleware that provides software libraries and tools for developing robotic systems. In these systems, tasks are scheduled by ROS~2 executors. Since the scheduling behavior of the default ROS~2 executor is inherently different from classical real-time scheduling theory, dedicated analyses or alternative executors, requiring substantial changes to ROS~2, have been required. In 2023, the events executor, which features an events queue and allows the possibility to make scheduling decisions immediately after a job completes, was introduced into ROS~2. In this paper, we show that, with only minor modifications of the events executor, a large body of research results from classical real-time scheduling theory becomes applicable. Hence, this enables analytical bounds on the worst-case response time and the end-to-end latency, outperforming bounds for the default ROS 2 executor in many scenarios. Our solution is easy to integrate into existing ROS 2 systems since it requires only minor backend modifications of the events executor, which is natively included in ROS 2. The evaluation results show that our ROS~2 events executor with minor modifications can have significant improvement in terms of dropped jobs, worst-case response time, end-to-end latency, and performance compared to the default ROS~2 executor.
Read more8/9/2024
🔗
0
ROS 2 on a Chip, Achieving Brain-Like Speeds and Efficiency in Robotic Networking
V'ictor Mayoral-Vilches, Juan Manuel Reina-Mu~noz, Marti~no Crespo-'Alvarez, David Mayoral-Vilches
The Robot Operating System (ROS) pubsub model played a pivotal role in developing sophisticated robotic applications. However, the complexities and real-time demands of modern robotics necessitate more efficient communication solutions that are deterministic and isochronous. This article introduces a groundbreaking approach: embedding ROS 2 message-passing infrastructure directly onto a specialized hardware chip, significantly enhancing speed and efficiency in robotic communications. Our FPGA prototypes of the chip design can send or receive packages in less than 2.5 microseconds, accelerating networking communications by more than 62x on average and improving energy consumption by more than 500x when compared to traditional ROS 2 software implementations on modern CPUs. Additionally, it dramatically reduces maximum latency in ROS 2 networking communication by more than 30,000x. In situations of peak latency, our design guarantees an isochronous response within 11 microseconds, a stark improvement over the potential hundreds of milliseconds reported by modern CPU systems under similar conditions.
Read more4/30/2024
0
PAAM: A Framework for Coordinated and Priority-Driven Accelerator Management in ROS 2
Daniel Enright, Yecheng Xiang, Hyunjong Choi, Hyoseung Kim
This paper proposes a Priority-driven Accelerator Access Management (PAAM) framework for multi-process robotic applications built on top of the Robot Operating System (ROS) 2 middleware platform. The framework addresses the issue of predictable execution of time- and safety-critical callback chains that require hardware accelerators such as GPUs and TPUs. PAAM provides a standalone ROS executor that acts as an accelerator resource server, arbitrating accelerator access requests from all other callbacks at the application layer. This approach enables coordinated and priority-driven accelerator access management in multi-process robotic systems. The framework design is directly applicable to all types of accelerators and enables granular control over how specific chains access accelerators, making it possible to achieve predictable real-time support for accelerators used by safety-critical callback chains without making changes to underlying accelerator device drivers. The paper shows that PAAM also offers a theoretical analysis that can upper bound the worst-case response time of safety-critical callback chains that necessitate accelerator access. This paper also demonstrates that complex robotic systems with extensive accelerator usage that are integrated with PAAM may achieve up to a 91% reduction in end-to-end response time of their critical callback chains.
Read more4/10/2024