TK-Planes: Tiered K-Planes with High Dimensional Feature Vectors for Dynamic UAV-based Scenes

0
Sign in to get full access
Overview
- This paper introduces TK-Planes, a hierarchical approach for processing dynamic scenes captured by Unmanned Aerial Vehicles (UAVs).
- The key idea is to use a tiered structure of k-planes, each of which represents a high-dimensional feature vector, to effectively model and track objects in complex UAV-based scenes.
- The proposed method aims to address the challenges of processing high-dimensional feature data and handling dynamic changes in UAV-based environments.
Plain English Explanation
The paper presents a new technique called TK-Planes for analyzing video footage captured by drones (also known as Unmanned Aerial Vehicles or UAVs). The researchers noticed that drone footage can be quite complex, with many moving objects and rapidly changing scenes. To better understand these dynamic drone-based scenes, they developed a hierarchical approach that uses a series of "k-planes" - each representing a high-dimensional set of features about the objects in the scene.
The key insight is that by organizing these high-dimensional feature vectors in a tiered structure, the system can more effectively track and model the objects as they move around. This is important because drones often capture a lot of detailed information about the environment, and traditional methods struggle to keep up with all the changes happening in the scene.
By using this tiered k-plane approach, the researchers believe they can better process the complex data from drones and gain a deeper understanding of the dynamic environments they are observing. This could have important applications in areas like surveillance, aerial mapping, 3D reconstruction, and dynamic scene analysis, where drones are increasingly being used to capture rich visual data.
Technical Explanation
The core contribution of the TK-Planes approach is the use of a hierarchical structure to represent high-dimensional feature vectors for dynamic objects in UAV-based scenes. Specifically, the system organizes these feature vectors into a tiered set of "k-planes", where each k-plane represents a different level of abstraction or granularity about the objects and their movements.
At the lowest level, individual k-planes encode detailed, high-dimensional features about specific objects or regions of interest. As you move up the hierarchy, the k-planes represent more aggregate, coarse-grained information about groups of objects and their overall trajectories. This tiered structure allows the system to efficiently process the complex, fast-changing data from UAV sensors and maintain an accurate model of the dynamic scene.
The researchers demonstrate the effectiveness of TK-Planes through extensive experiments on challenging UAV-based datasets. They show that the hierarchical approach outperforms other state-of-the-art techniques, particularly when it comes to handling occlusions, fast motion, and other challenging aspects of drone-captured scenes. The insights from this work could help advance the use of edge detection in neural networks for improved UAV perception and analysis.
Critical Analysis
One potential limitation of the TK-Planes approach is the computational complexity of maintaining the hierarchical structure and updating the high-dimensional feature vectors as the scene changes. The authors acknowledge this challenge and suggest that further optimizations may be needed to deploy the system in real-time applications.
Additionally, the paper does not provide a detailed analysis of the types of features or object representations that are most effective for this tiered approach. It would be helpful to understand which feature dimensions are most crucial for accurately modeling the dynamic UAV-based scenes, and whether certain types of features are more robust to the challenges posed by drone footage.
Another area for further research could be exploring how the TK-Planes approach might be extended to incorporate additional sensor modalities beyond just visual data, such as lidar or thermal imaging. Integrating multiple data sources could lead to even more comprehensive and robust scene understanding for UAV applications.
Overall, the TK-Planes technique represents an interesting and promising approach for addressing the challenges of processing complex, high-dimensional data from dynamic UAV-based scenes. The hierarchical structure and use of feature vectors seem well-suited to this domain, and the authors have demonstrated promising results. However, further work is needed to fully optimize the system and explore its broader potential applications.
Conclusion
The TK-Planes paper introduces a novel hierarchical approach for analyzing dynamic scenes captured by Unmanned Aerial Vehicles (UAVs). By organizing high-dimensional feature vectors into a tiered structure of k-planes, the system is able to effectively model and track objects in complex drone-based environments.
This work represents an important step forward in addressing the challenges of processing the rich, fast-changing data generated by modern UAV sensors. The insights from this research could have significant implications for a wide range of applications, such as surveillance, aerial mapping, 3D reconstruction, and dynamic scene analysis, where drones are playing an increasingly important role.
While the TK-Planes approach shows promise, further research is needed to optimize its computational efficiency and explore the potential benefits of integrating additional sensor modalities. By continuing to advance the state of the art in UAV-based scene understanding, researchers can unlock new opportunities for using drone technology to tackle complex real-world challenges.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
TK-Planes: Tiered K-Planes with High Dimensional Feature Vectors for Dynamic UAV-based Scenes
Christopher Maxey, Jaehoon Choi, Yonghan Lee, Hyungtae Lee, Dinesh Manocha, Heesung Kwon
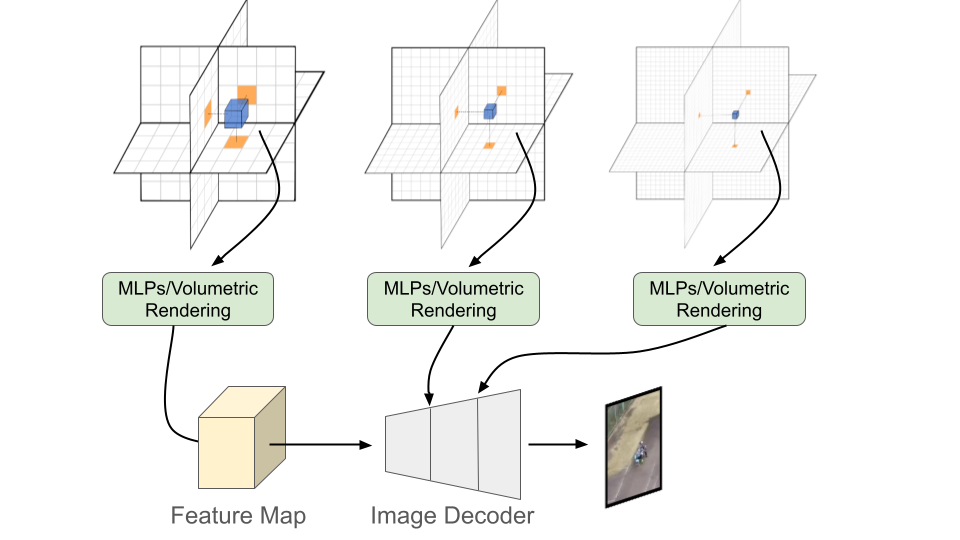
In this paper, we present a new approach to bridge the domain gap between synthetic and real-world data for un- manned aerial vehicle (UAV)-based perception. Our formu- lation is designed for dynamic scenes, consisting of moving objects or human actions, where the goal is to recognize the pose or actions. We propose an extension of K-Planes Neural Radiance Field (NeRF), wherein our algorithm stores a set of tiered feature vectors. The tiered feature vectors are generated to effectively model conceptual information about a scene as well as an image decoder that transforms output feature maps into RGB images. Our technique leverages the information amongst both static and dynamic objects within a scene and is able to capture salient scene attributes of high altitude videos. We evaluate its performance on challenging datasets, including Okutama Action and UG2, and observe considerable improvement in accuracy over state of the art aerial perception algorithms.
Read more5/7/2024

0
Radiance Field Learners As UAV First-Person Viewers
Liqi Yan, Qifan Wang, Junhan Zhao, Qiang Guan, Zheng Tang, Jianhui Zhang, Dongfang Liu
First-Person-View (FPV) holds immense potential for revolutionizing the trajectory of Unmanned Aerial Vehicles (UAVs), offering an exhilarating avenue for navigating complex building structures. Yet, traditional Neural Radiance Field (NeRF) methods face challenges such as sampling single points per iteration and requiring an extensive array of views for supervision. UAV videos exacerbate these issues with limited viewpoints and significant spatial scale variations, resulting in inadequate detail rendering across diverse scales. In response, we introduce FPV-NeRF, addressing these challenges through three key facets: (1) Temporal consistency. Leveraging spatio-temporal continuity ensures seamless coherence between frames; (2) Global structure. Incorporating various global features during point sampling preserves space integrity; (3) Local granularity. Employing a comprehensive framework and multi-resolution supervision for multi-scale scene feature representation tackles the intricacies of UAV video spatial scales. Additionally, due to the scarcity of publicly available FPV videos, we introduce an innovative view synthesis method using NeRF to generate FPV perspectives from UAV footage, enhancing spatial perception for drones. Our novel dataset spans diverse trajectories, from outdoor to indoor environments, in the UAV domain, differing significantly from traditional NeRF scenarios. Through extensive experiments encompassing both interior and exterior building structures, FPV-NeRF demonstrates a superior understanding of the UAV flying space, outperforming state-of-the-art methods in our curated UAV dataset. Explore our project page for further insights: https://fpv-nerf.github.io/.
Read more8/13/2024
🧠
0
WavePlanes: A compact Wavelet representation for Dynamic Neural Radiance Fields
Adrian Azzarelli, Nantheera Anantrasirichai, David R Bull
Dynamic Neural Radiance Fields (Dynamic NeRF) enhance NeRF technology to model moving scenes. However, they are resource intensive and challenging to compress. To address these issues, this paper presents WavePlanes, a fast and more compact explicit model. We propose a multi-scale space and space-time feature plane representation using N-level 2-D wavelet coefficients. The inverse discrete wavelet transform reconstructs feature signals at varying detail, which are linearly decoded to approximate the color and density of volumes in a 4-D grid. Exploiting the sparsity of wavelet coefficients, we compress the model using a Hash Map containing only non-zero coefficients and their locations on each plane. Compared to the state-of-the-art (SotA) plane-based models, WavePlanes is up to 15x smaller while being less resource demanding and competitive in performance and training time. Compared to other small SotA models WavePlanes preserves details better without requiring custom CUDA code or high performance computing resources. Our code is available at: https://github.com/azzarelli/waveplanes/
Read more5/9/2024
🏅
0
Aerial-NeRF: Adaptive Spatial Partitioning and Sampling for Large-Scale Aerial Rendering
Xiaohan Zhang, Yukui Qiu, Zhenyu Sun, Qi Liu
Recent progress in large-scale scene rendering has yielded Neural Radiance Fields (NeRF)-based models with an impressive ability to synthesize scenes across small objects and indoor scenes. Nevertheless, extending this idea to large-scale aerial rendering poses two critical problems. Firstly, a single NeRF cannot render the entire scene with high-precision for complex large-scale aerial datasets since the sampling range along each view ray is insufficient to cover buildings adequately. Secondly, traditional NeRFs are infeasible to train on one GPU to enable interactive fly-throughs for modeling massive images. Instead, existing methods typically separate the whole scene into multiple regions and train a NeRF on each region, which are unaccustomed to different flight trajectories and difficult to achieve fast rendering. To that end, we propose Aerial-NeRF with three innovative modifications for jointly adapting NeRF in large-scale aerial rendering: (1) Designing an adaptive spatial partitioning and selection method based on drones' poses to adapt different flight trajectories; (2) Using similarity of poses instead of (expert) network for rendering speedup to determine which region a new viewpoint belongs to; (3) Developing an adaptive sampling approach for rendering performance improvement to cover the entire buildings at different heights. Extensive experiments have conducted to verify the effectiveness and efficiency of Aerial-NeRF, and new state-of-the-art results have been achieved on two public large-scale aerial datasets and presented SCUTic dataset. Note that our model allows us to perform rendering over 4 times as fast as compared to multiple competitors. Our dataset, code, and model are publicly available at https://drliuqi.github.io/.
Read more5/13/2024