ToolEENet: Tool Affordance 6D Pose Estimation
2404.04193
0
0
Abstract
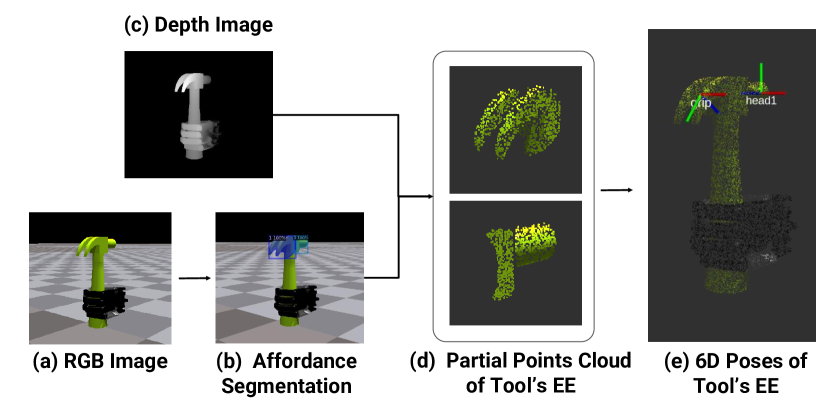
The exploration of robotic dexterous hands utilizing tools has recently attracted considerable attention. A significant challenge in this field is the precise awareness of a tool's pose when grasped, as occlusion by the hand often degrades the quality of the estimation. Additionally, the tool's overall pose often fails to accurately represent the contact interaction, thereby limiting the effectiveness of vision-guided, contact-dependent activities. To overcome this limitation, we present the innovative TOOLEE dataset, which, to the best of our knowledge, is the first to feature affordance segmentation of a tool's end-effector (EE) along with its defined 6D pose based on its usage. Furthermore, we propose the ToolEENet framework for accurate 6D pose estimation of the tool's EE. This framework begins by segmenting the tool's EE from raw RGBD data, then uses a diffusion model-based pose estimator for 6D pose estimation at a category-specific level. Addressing the issue of symmetry in pose estimation, we introduce a symmetry-aware pose representation that enhances the consistency of pose estimation. Our approach excels in this field, demonstrating high levels of precision and generalization. Furthermore, it shows great promise for application in contact-based manipulation scenarios. All data and codes are available on the project website: https://yuyangtu.github.io/projectToolEENet.html
Create account to get full access
Overview
- The paper presents ToolEENet, a tool affordance 6D pose estimation system.
- The research was conducted by researchers from the University of Hamburg, Germany and Agile Robots AG.
- The work was funded by the German Research Foundation (DFG) and the National Science Foundation of China (NSFC).
Plain English Explanation
The paper describes a new computer vision system called ToolEENet that can accurately estimate the 6D (3D position and 3D orientation) pose of tools in images. This is an important task for robotics applications, where a robot needs to understand the precise location and orientation of tools in order to effectively use them.
The key innovation of ToolEENet is that it can learn to recognize and localize a wide variety of tools, even ones it hasn't seen before, by leveraging generalizing-6-dof-grasp-detection-via-domain and freeze-training-free-zero-shot-6d-pose techniques. This allows the system to be more flexible and adaptable compared to previous approaches that required extensive retraining to handle new tool types.
The paper demonstrates that ToolEENet achieves state-of-the-art performance on standard benchmark datasets for tool pose estimation. This suggests the system could be very useful for robotics applications that involve tool use, such as open-vocabulary-object-6d-pose-estimation, centergrasp-object-aware-implicit-representation-learning-simultaneous, and gears-local-geometry-aware-hand-object-interaction.
Technical Explanation
The ToolEENet system uses a deep learning architecture to estimate the 6D pose of tools in RGB-D (color and depth) images. The core of the network is a backbone CNN that extracts visual features from the input image. This is followed by several task-specific heads that predict the 3D position, 3D orientation, and tool affordance of the tool in the scene.
A key innovation is the use of a generalizing-6-dof-grasp-detection-via-domain technique to enable ToolEENet to recognize a wide variety of tools, even ones it hasn't been explicitly trained on. This is done by learning a shared feature representation that can generalize across different tool types.
The researchers also utilize a freeze-training-free-zero-shot-6d-pose strategy, which allows the system to estimate the pose of novel tools without any additional training. This is achieved by leveraging preexisting knowledge about tool geometries and their typical poses.
Experiments on standard benchmarks show that ToolEENet outperforms previous state-of-the-art methods for tool pose estimation. The system is able to accurately localize and orient a wide variety of tools, including common household objects as well as more specialized industrial tools.
Critical Analysis
The paper provides a thorough evaluation of ToolEENet's performance and compares it against other leading approaches. However, the authors acknowledge that the system has some limitations. For example, it may struggle with highly occluded or partially visible tools, and its performance could degrade in cluttered scenes with many overlapping objects.
Additionally, the open-vocabulary-object-6d-pose-estimation, centergrasp-object-aware-implicit-representation-learning-simultaneous, and gears-local-geometry-aware-hand-object-interaction techniques used by ToolEENet have their own limitations and caveats that could impact the overall system performance in certain scenarios.
It would be interesting to see further research exploring ways to improve ToolEENet's robustness to occlusion and clutter, as well as investigating how it could be integrated with other complementary technologies to create more comprehensive tool manipulation systems for robotics.
Conclusion
The ToolEENet system presented in this paper represents a significant advance in tool affordance 6D pose estimation. By leveraging state-of-the-art techniques for generalizing across tool types and performing zero-shot pose estimation, ToolEENet demonstrates the ability to accurately localize and orient a wide variety of tools in images.
This technology could have important implications for robotics applications that involve tool use, enabling more sophisticated and versatile tool manipulation capabilities. The paper's strong experimental results suggest ToolEENet is a promising tool for bridging the gap between human and robot tool use, with potential applications in areas like assistive robotics, industrial automation, and household assistance.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
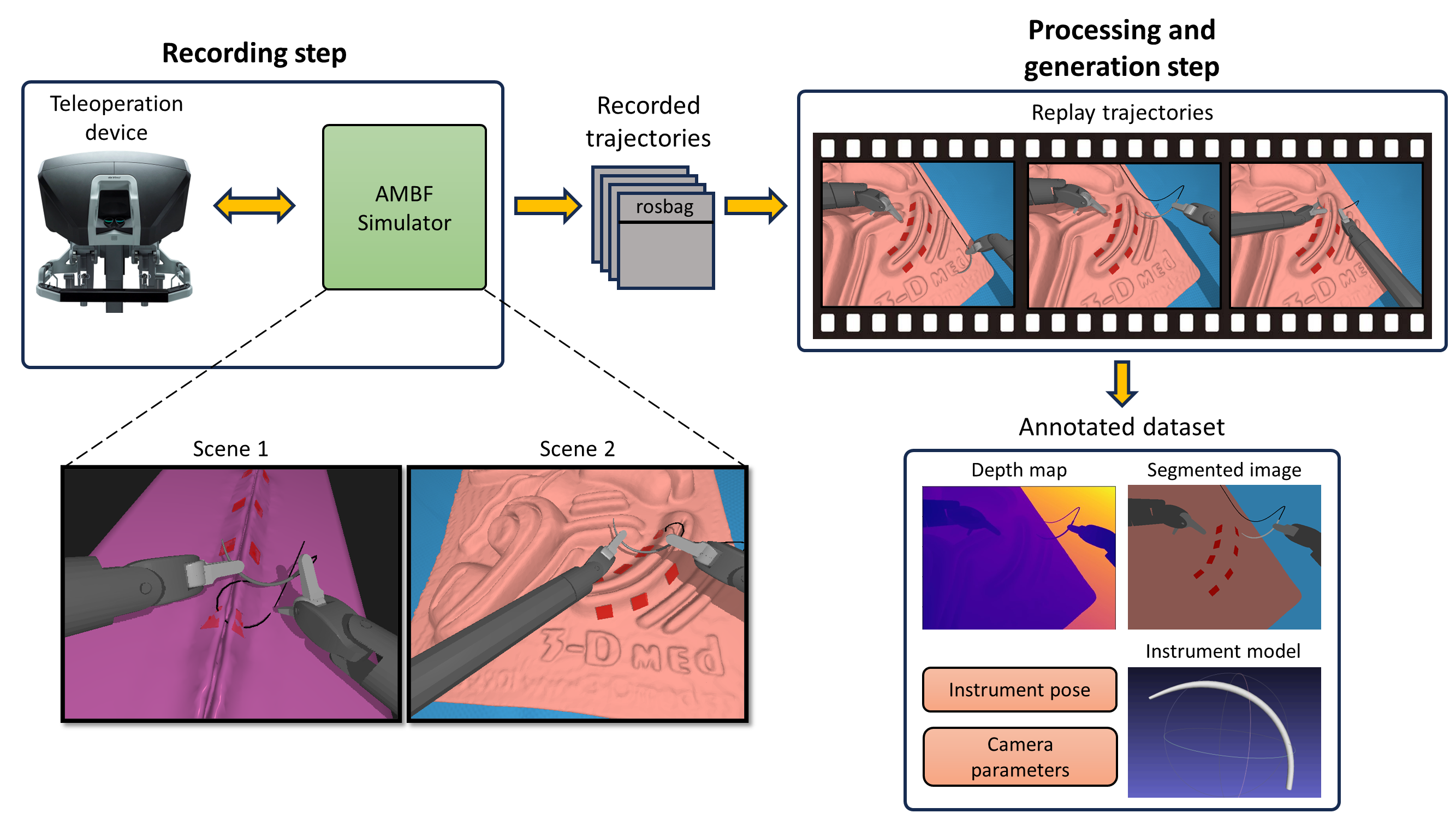
Realistic Data Generation for 6D Pose Estimation of Surgical Instruments
Juan Antonio Barragan, Jintan Zhang, Haoying Zhou, Adnan Munawar, Peter Kazanzides
0
0
Automation in surgical robotics has the potential to improve patient safety and surgical efficiency, but it is difficult to achieve due to the need for robust perception algorithms. In particular, 6D pose estimation of surgical instruments is critical to enable the automatic execution of surgical maneuvers based on visual feedback. In recent years, supervised deep learning algorithms have shown increasingly better performance at 6D pose estimation tasks; yet, their success depends on the availability of large amounts of annotated data. In household and industrial settings, synthetic data, generated with 3D computer graphics software, has been shown as an alternative to minimize annotation costs of 6D pose datasets. However, this strategy does not translate well to surgical domains as commercial graphics software have limited tools to generate images depicting realistic instrument-tissue interactions. To address these limitations, we propose an improved simulation environment for surgical robotics that enables the automatic generation of large and diverse datasets for 6D pose estimation of surgical instruments. Among the improvements, we developed an automated data generation pipeline and an improved surgical scene. To show the applicability of our system, we generated a dataset of 7.5k images with pose annotations of a surgical needle that was used to evaluate a state-of-the-art pose estimation network. The trained model obtained a mean translational error of 2.59mm on a challenging dataset that presented varying levels of occlusion. These results highlight our pipeline's success in training and evaluating novel vision algorithms for surgical robotics applications.
6/12/2024
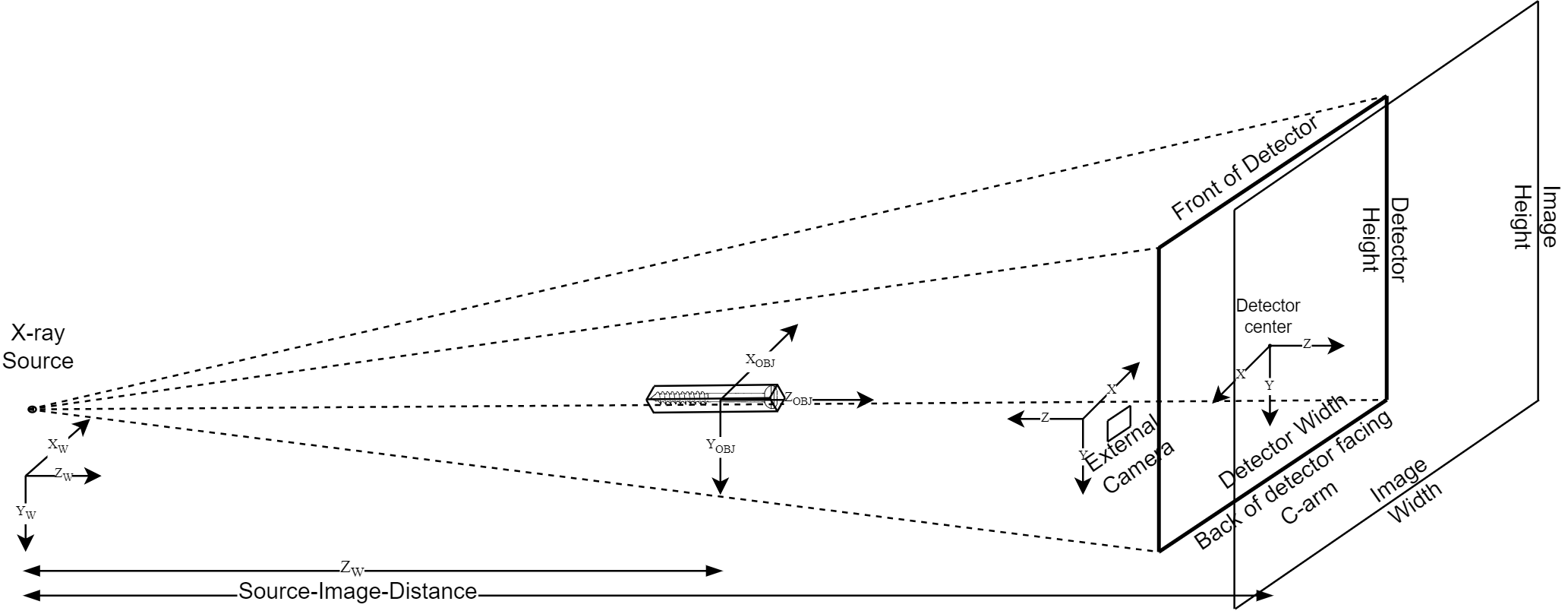
Advancing 6-DoF Instrument Pose Estimation in Variable X-Ray Imaging Geometries
Christiaan G. A. Viviers, Lena Filatova, Maurice Termeer, Peter H. N. de With, Fons van der Sommen
0
0
Accurate 6-DoF pose estimation of surgical instruments during minimally invasive surgeries can substantially improve treatment strategies and eventual surgical outcome. Existing deep learning methods have achieved accurate results, but they require custom approaches for each object and laborious setup and training environments often stretching to extensive simulations, whilst lacking real-time computation. We propose a general-purpose approach of data acquisition for 6-DoF pose estimation tasks in X-ray systems, a novel and general purpose YOLOv5-6D pose architecture for accurate and fast object pose estimation and a complete method for surgical screw pose estimation under acquisition geometry consideration from a monocular cone-beam X-ray image. The proposed YOLOv5-6D pose model achieves competitive results on public benchmarks whilst being considerably faster at 42 FPS on GPU. In addition, the method generalizes across varying X-ray acquisition geometry and semantic image complexity to enable accurate pose estimation over different domains. Finally, the proposed approach is tested for bone-screw pose estimation for computer-aided guidance during spine surgeries. The model achieves a 92.41% by the 0.1 ADD-S metric, demonstrating a promising approach for enhancing surgical precision and patient outcomes. The code for YOLOv5-6D is publicly available at https://github.com/cviviers/YOLOv5-6D-Pose
5/21/2024

Robust 6DoF Pose Estimation Against Depth Noise and a Comprehensive Evaluation on a Mobile Dataset
Zixun Huang, Keling Yao, Seth Z. Zhao, Chuanyu Pan, Chenfeng Xu, Kathy Zhuang, Tianjian Xu, Weiyu Feng, Allen Y. Yang
0
0
Robust 6DoF pose estimation with mobile devices is the foundation for applications in robotics, augmented reality, and digital twin localization. In this paper, we extensively investigate the robustness of existing RGBD-based 6DoF pose estimation methods against varying levels of depth sensor noise. We highlight that existing 6DoF pose estimation methods suffer significant performance discrepancies due to depth measurement inaccuracies. In response to the robustness issue, we present a simple and effective transformer-based 6DoF pose estimation approach called DTTDNet, featuring a novel geometric feature filtering module and a Chamfer distance loss for training. Moreover, we advance the field of robust 6DoF pose estimation and introduce a new dataset -- Digital Twin Tracking Dataset Mobile (DTTD-Mobile), tailored for digital twin object tracking with noisy depth data from the mobile RGBD sensor suite of the Apple iPhone 14 Pro. Extensive experiments demonstrate that DTTDNet significantly outperforms state-of-the-art methods at least 4.32, up to 60.74 points in ADD metrics on the DTTD-Mobile. More importantly, our approach exhibits superior robustness to varying levels of measurement noise, setting a new benchmark for the robustness to noise measurements. Code and dataset are made publicly available at: https://github.com/augcog/DTTD2
6/19/2024

Omni6DPose: A Benchmark and Model for Universal 6D Object Pose Estimation and Tracking
Jiyao Zhang, Weiyao Huang, Bo Peng, Mingdong Wu, Fei Hu, Zijian Chen, Bo Zhao, Hao Dong
0
0
6D Object Pose Estimation is a crucial yet challenging task in computer vision, suffering from a significant lack of large-scale datasets. This scarcity impedes comprehensive evaluation of model performance, limiting research advancements. Furthermore, the restricted number of available instances or categories curtails its applications. To address these issues, this paper introduces Omni6DPose, a substantial dataset characterized by its diversity in object categories, large scale, and variety in object materials. Omni6DPose is divided into three main components: ROPE (Real 6D Object Pose Estimation Dataset), which includes 332K images annotated with over 1.5M annotations across 581 instances in 149 categories; SOPE(Simulated 6D Object Pose Estimation Dataset), consisting of 475K images created in a mixed reality setting with depth simulation, annotated with over 5M annotations across 4162 instances in the same 149 categories; and the manually aligned real scanned objects used in both ROPE and SOPE. Omni6DPose is inherently challenging due to the substantial variations and ambiguities. To address this challenge, we introduce GenPose++, an enhanced version of the SOTA category-level pose estimation framework, incorporating two pivotal improvements: Semantic-aware feature extraction and Clustering-based aggregation. Moreover, we provide a comprehensive benchmarking analysis to evaluate the performance of previous methods on this large-scale dataset in the realms of 6D object pose estimation and pose tracking.
6/7/2024