Advancing 6-DoF Instrument Pose Estimation in Variable X-Ray Imaging Geometries

0
Sign in to get full access
Overview
- This paper focuses on improving the accuracy of 6-degree-of-freedom (6-DoF) pose estimation for X-ray instruments in variable imaging geometries.
- The authors propose a deep learning-based approach that can accurately estimate the 3D position and orientation of surgical instruments in X-ray images, even when the imaging geometry changes.
- This is important for applications in computer-assisted surgery, where precise tracking of surgical tools is crucial for safe and effective procedures.
Plain English Explanation
The paper describes a new way to track the position and orientation of medical instruments during X-ray-guided procedures, such as surgery. Accurately knowing the exact 3D location and angle of these instruments is critical for computer-assisted surgery, where the surgeon relies on the X-ray images to guide their movements.
However, the X-ray imaging setup can change between procedures, which makes it challenging to precisely track the instruments. The authors of this paper have developed a deep learning algorithm that can accurately estimate the 6-DoF (6 degrees of freedom) pose of the instruments, even when the imaging geometry is different.
This means the system can still track the instruments correctly, even if the X-ray machine is moved or adjusted. This is an important advancement, as it will help make computer-assisted surgery more reliable and effective, leading to better patient outcomes.
Technical Explanation
The paper introduces a deep learning-based approach for 6-DoF pose estimation of surgical instruments in variable X-ray imaging geometries. The proposed method uses a ResidualPoseNet architecture, which combines a TooleeNet backbone for instrument segmentation with a PS-6D module for 6-DoF pose estimation.
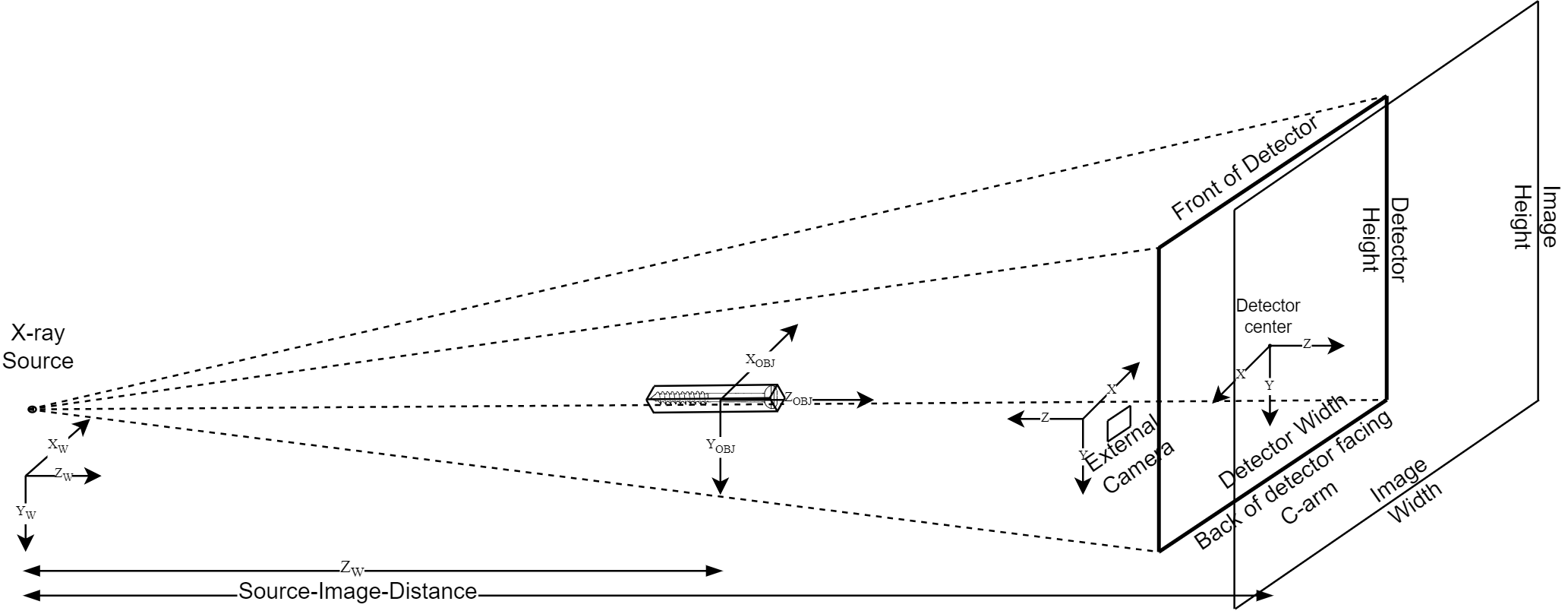
The key innovation is the ability to handle changes in the X-ray imaging setup, such as variations in the source-to-detector distance, by incorporating these geometric parameters as additional inputs to the neural network. This allows the model to learn the relationship between the imaging geometry and the instrument pose, enabling robust performance even in variable conditions.
The authors evaluate their approach on a dataset of simulated X-ray images with ground truth 6-DoF poses, as well as a real-world dataset of clinical X-ray images. The results demonstrate significant improvements in pose estimation accuracy compared to baseline methods, showing the effectiveness of the proposed technique.
Critical Analysis
The paper presents a promising approach for advancing the state of the art in 6-DoF instrument pose estimation for X-ray-guided procedures. The authors' focus on handling variable imaging geometries is a crucial practical consideration, as real-world surgical setups often involve changes to the X-ray system configuration.
However, the paper could have provided more details on the limitations of the proposed method. For example, it is unclear how the system would perform in the presence of occlusions, instrument deformations, or other challenging scenarios commonly encountered in surgical settings. Additionally, the evaluation on simulated data is a limitation, and further testing on a larger, more diverse clinical dataset would be valuable to assess the method's real-world applicability.
Nonetheless, the core idea of incorporating imaging geometry information into the pose estimation model is a noteworthy contribution that could inspire future research in this direction. Integrating this approach with other advancements, such as dynamic scene reconstruction and assembly state detection, may lead to even more robust and comprehensive surgical guidance systems.
Conclusion
This paper presents an innovative deep learning-based approach for improving the accuracy of 6-DoF pose estimation for surgical instruments in variable X-ray imaging geometries. By explicitly accounting for changes in the imaging setup, the proposed method demonstrates significantly better performance compared to existing techniques.
The ability to track instruments reliably, even when the X-ray system configuration changes, is a crucial advancement for computer-assisted surgery. This could lead to more robust and reliable guidance systems, ultimately improving the safety and effectiveness of minimally invasive procedures and enhancing patient outcomes.
While the paper has some limitations, the core ideas and insights provided here represent an important step forward in the field of surgical vision and instrument tracking. Continued research and refinement of these techniques could have a profound impact on the future of computer-assisted surgery.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Advancing 6-DoF Instrument Pose Estimation in Variable X-Ray Imaging Geometries
Christiaan G. A. Viviers, Lena Filatova, Maurice Termeer, Peter H. N. de With, Fons van der Sommen
Accurate 6-DoF pose estimation of surgical instruments during minimally invasive surgeries can substantially improve treatment strategies and eventual surgical outcome. Existing deep learning methods have achieved accurate results, but they require custom approaches for each object and laborious setup and training environments often stretching to extensive simulations, whilst lacking real-time computation. We propose a general-purpose approach of data acquisition for 6-DoF pose estimation tasks in X-ray systems, a novel and general purpose YOLOv5-6D pose architecture for accurate and fast object pose estimation and a complete method for surgical screw pose estimation under acquisition geometry consideration from a monocular cone-beam X-ray image. The proposed YOLOv5-6D pose model achieves competitive results on public benchmarks whilst being considerably faster at 42 FPS on GPU. In addition, the method generalizes across varying X-ray acquisition geometry and semantic image complexity to enable accurate pose estimation over different domains. Finally, the proposed approach is tested for bone-screw pose estimation for computer-aided guidance during spine surgeries. The model achieves a 92.41% by the 0.1 ADD-S metric, demonstrating a promising approach for enhancing surgical precision and patient outcomes. The code for YOLOv5-6D is publicly available at https://github.com/cviviers/YOLOv5-6D-Pose
Read more5/21/2024
0
Realistic Data Generation for 6D Pose Estimation of Surgical Instruments
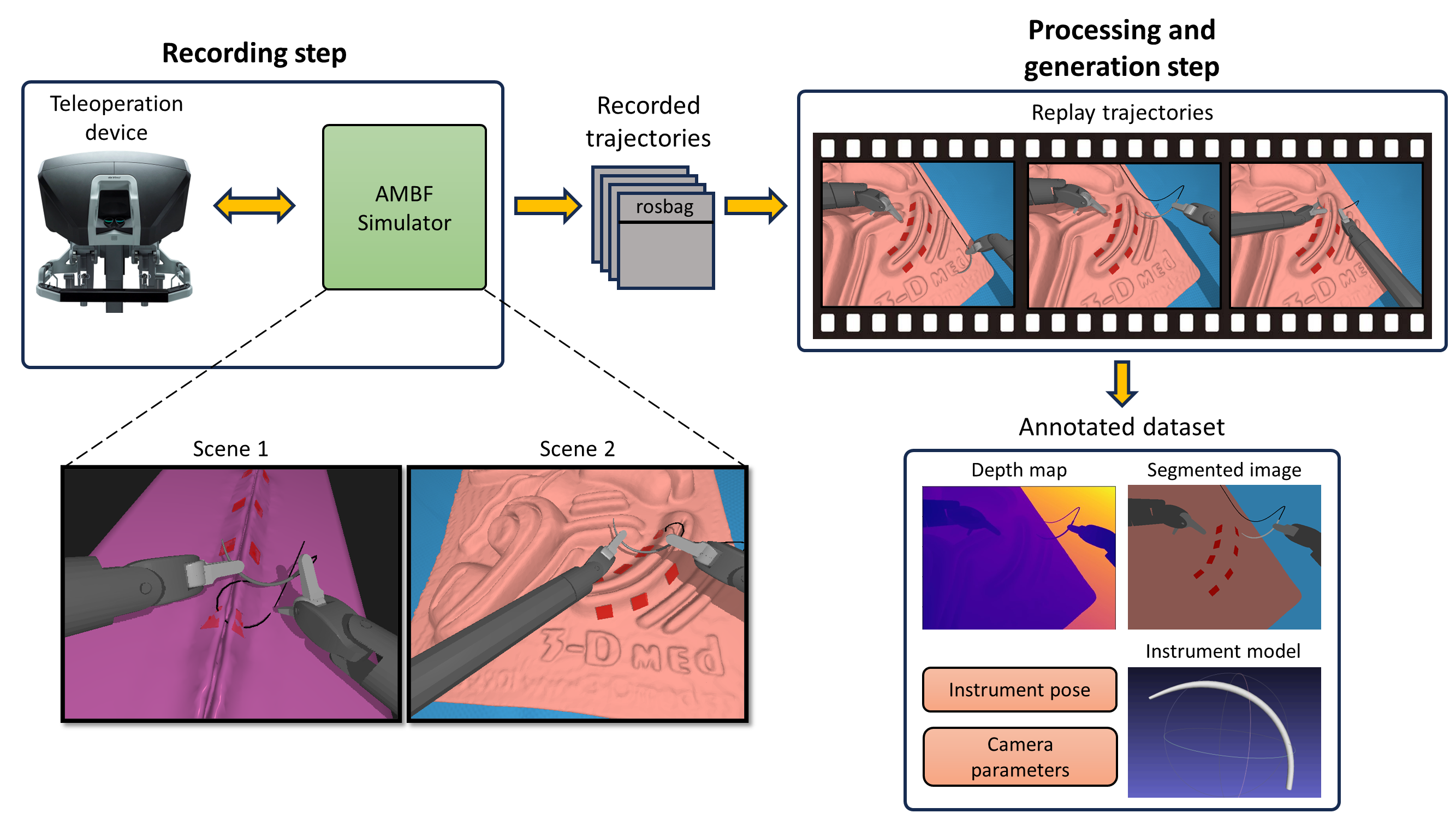
Juan Antonio Barragan, Jintan Zhang, Haoying Zhou, Adnan Munawar, Peter Kazanzides
Automation in surgical robotics has the potential to improve patient safety and surgical efficiency, but it is difficult to achieve due to the need for robust perception algorithms. In particular, 6D pose estimation of surgical instruments is critical to enable the automatic execution of surgical maneuvers based on visual feedback. In recent years, supervised deep learning algorithms have shown increasingly better performance at 6D pose estimation tasks; yet, their success depends on the availability of large amounts of annotated data. In household and industrial settings, synthetic data, generated with 3D computer graphics software, has been shown as an alternative to minimize annotation costs of 6D pose datasets. However, this strategy does not translate well to surgical domains as commercial graphics software have limited tools to generate images depicting realistic instrument-tissue interactions. To address these limitations, we propose an improved simulation environment for surgical robotics that enables the automatic generation of large and diverse datasets for 6D pose estimation of surgical instruments. Among the improvements, we developed an automated data generation pipeline and an improved surgical scene. To show the applicability of our system, we generated a dataset of 7.5k images with pose annotations of a surgical needle that was used to evaluate a state-of-the-art pose estimation network. The trained model obtained a mean translational error of 2.59mm on a challenging dataset that presented varying levels of occlusion. These results highlight our pipeline's success in training and evaluating novel vision algorithms for surgical robotics applications.
Read more6/12/2024

0
Monocular pose estimation of articulated surgical instruments in open surgery
Robert Spektor, Tom Friedman, Itay Or, Gil Bolotin, Shlomi Laufer
This work presents a novel approach to monocular 6D pose estimation of surgical instruments in open surgery, addressing challenges such as object articulations, symmetries, occlusions, and lack of annotated real-world data. The method leverages synthetic data generation and domain adaptation techniques to overcome these obstacles. The proposed approach consists of three main components: (1) synthetic data generation using 3D modeling of surgical tools with articulation rigging and physically-based rendering; (2) a tailored pose estimation framework combining object detection with pose estimation and a hybrid geometric fusion strategy; and (3) a training strategy that utilizes both synthetic and real unannotated data, employing domain adaptation on real video data using automatically generated pseudo-labels. Evaluations conducted on videos of open surgery demonstrate the good performance and real-world applicability of the proposed method, highlighting its potential for integration into medical augmented reality and robotic systems. The approach eliminates the need for extensive manual annotation of real surgical data.
Read more7/18/2024
🛸
0
One Point, One Object: Simultaneous 3D Object Segmentation and 6-DOF Pose Estimation
Hongsen Liu
We propose a single-shot method for simultaneous 3D object segmentation and 6-DOF pose estimation in pure 3D point clouds scenes based on a consensus that emph{one point only belongs to one object}, i.e., each point has the potential power to predict the 6-DOF pose of its corresponding object. Unlike the recently proposed methods of the similar task, which rely on 2D detectors to predict the projection of 3D corners of the 3D bounding boxes and the 6-DOF pose must be estimated by a PnP like spatial transformation method, ours is concise enough not to require additional spatial transformation between different dimensions. Due to the lack of training data for many objects, the recently proposed 2D detection methods try to generate training data by using rendering engine and achieve good results. However, rendering in 3D space along with 6-DOF is relatively difficult. Therefore, we propose an augmented reality technology to generate the training data in semi-virtual reality 3D space. The key component of our method is a multi-task CNN architecture that can simultaneously predicts the 3D object segmentation and 6-DOF pose estimation in pure 3D point clouds. For experimental evaluation, we generate expanded training data for two state-of-the-arts 3D object datasets cite{PLCHF}cite{TLINEMOD} by using Augmented Reality technology (AR). We evaluate our proposed method on the two datasets. The results show that our method can be well generalized into multiple scenarios and provide performance comparable to or better than the state-of-the-arts.
Read more6/7/2024