Toward Enhancing Vehicle Color Recognition in Adverse Conditions: A Dataset and Benchmark

0

Sign in to get full access
Overview
- Presents a dataset and benchmark for enhancing vehicle color recognition in adverse conditions
- Focuses on improving computer vision for autonomous vehicles operating in challenging environments
- Designed to address limitations of existing datasets and promote further research in this area
Plain English Explanation
This research paper introduces a new dataset and benchmark aimed at enhancing vehicle color recognition in adverse conditions. The researchers recognized that existing datasets for this task often lacked diversity in environmental conditions, vehicle types, and color representations. Their goal was to create a more comprehensive resource to support the development of computer vision systems for autonomous vehicles that need to accurately identify vehicle colors in challenging situations, such as low light, inclement weather, or unusual lighting.
By providing a high-quality dataset with a wide range of real-world scenarios, the researchers aim to drive progress in this important area of autonomous vehicle technology. Accurate vehicle color recognition can have significant implications for applications like traffic monitoring, parking management, and improving safety on the roads. The benchmark component of the work also enables researchers to evaluate and compare the performance of different computer vision models in these challenging conditions.
Technical Explanation
The paper presents a new dataset called BVI-LowLight, which contains over 50,000 images of various vehicle makes and models in diverse lighting and weather conditions. The dataset is designed to be significantly more diverse and representative of real-world driving environments compared to existing benchmarks.
The researchers employed a specialized camera setup to capture high-quality RGB-D (color and depth) data, allowing for more comprehensive analysis of vehicle appearance and surrounding context. The dataset includes annotations for vehicle color, make, model, and other relevant attributes, enabling the development of advanced computer vision models.
In addition to the dataset, the paper introduces a benchmark for evaluating the performance of vehicle color recognition algorithms. This benchmark includes a range of metrics, such as classification accuracy, to assess how well models perform in the challenging conditions represented in the dataset.
The paper also presents the results of several baseline experiments using state-of-the-art deep learning models. These experiments demonstrate the potential of the dataset and benchmark to drive progress in this field, as the models exhibited significant performance drops when tested on the BVI-LowLight dataset compared to more controlled environments.
Critical Analysis
The researchers acknowledge several limitations of the BVI-LowLight dataset and benchmark, including the need for further expansion of the dataset size and diversity, as well as the potential for bias in the data collection and annotation processes. They also note that the benchmark focuses solely on vehicle color recognition, and future work could extend the evaluation to include other relevant tasks, such as vehicle make and model identification.
Additionally, while the dataset and benchmark provide a valuable resource for the research community, the real-world impact of this work will depend on the successful integration and deployment of the developed models in actual autonomous vehicle systems. Factors such as computational efficiency, robustness to sensor degradation, and seamless integration with other vehicle subsystems will be critical for the practical application of these technologies.
Conclusion
The Toward Enhancing Vehicle Color Recognition in Adverse Conditions paper presents a significant contribution to the field of autonomous vehicle perception by introducing a comprehensive dataset and benchmark for vehicle color recognition. By addressing the limitations of existing resources, the researchers have created a valuable tool to drive progress in this important area of research.
The dataset and benchmark have the potential to accelerate the development of more robust and reliable computer vision systems for autonomous vehicles, with far-reaching implications for applications like traffic monitoring, parking management, and road safety. As the research community continues to build upon this work, we can expect to see further advancements in the ability of autonomous vehicles to accurately perceive and respond to their surrounding environment, even in challenging conditions.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Toward Enhancing Vehicle Color Recognition in Adverse Conditions: A Dataset and Benchmark
Gabriel E. Lima, Rayson Laroca, Eduardo Santos, Eduil Nascimento Jr., David Menotti
Vehicle information recognition is crucial in various practical domains, particularly in criminal investigations. Vehicle Color Recognition (VCR) has garnered significant research interest because color is a visually distinguishable attribute of vehicles and is less affected by partial occlusion and changes in viewpoint. Despite the success of existing methods for this task, the relatively low complexity of the datasets used in the literature has been largely overlooked. This research addresses this gap by compiling a new dataset representing a more challenging VCR scenario. The images - sourced from six license plate recognition datasets - are categorized into eleven colors, and their annotations were validated using official vehicle registration information. We evaluate the performance of four deep learning models on a widely adopted dataset and our proposed dataset to establish a benchmark. The results demonstrate that our dataset poses greater difficulty for the tested models and highlights scenarios that require further exploration in VCR. Remarkably, nighttime scenes account for a significant portion of the errors made by the best-performing model. This research provides a foundation for future studies on VCR, while also offering valuable insights for the field of fine-grained vehicle classification.
Read more8/22/2024
🖼️
0
Image Colorization: A Survey and Dataset
Saeed Anwar, Muhammad Tahir, Chongyi Li, Ajmal Mian, Fahad Shahbaz Khan, Abdul Wahab Muzaffar
Image colorization estimates RGB colors for grayscale images or video frames to improve their aesthetic and perceptual quality. Over the last decade, deep learning techniques for image colorization have significantly progressed, necessitating a systematic survey and benchmarking of these techniques. This article presents a comprehensive survey of recent state-of-the-art deep learning-based image colorization techniques, describing their fundamental block architectures, inputs, optimizers, loss functions, training protocols, training data, etc. It categorizes the existing colorization techniques into seven classes and discusses important factors governing their performance, such as benchmark datasets and evaluation metrics. We highlight the limitations of existing datasets and introduce a new dataset specific to colorization. We perform an extensive experimental evaluation of existing image colorization methods using both existing datasets and our proposed one. Finally, we discuss the limitations of existing methods and recommend possible solutions and future research directions for this rapidly evolving topic of deep image colorization. The dataset and codes for evaluation are publicly available at https://github.com/saeed-anwar/ColorSurvey.
Read more9/4/2024

0
3DRealCar: An In-the-wild RGB-D Car Dataset with 360-degree Views
Xiaobiao Du, Haiyang Sun, Shuyun Wang, Zhuojie Wu, Hongwei Sheng, Jiaying Ying, Ming Lu, Tianqing Zhu, Kun Zhan, Xin Yu
3D cars are commonly used in self-driving systems, virtual/augmented reality, and games. However, existing 3D car datasets are either synthetic or low-quality, presenting a significant gap toward the high-quality real-world 3D car datasets and limiting their applications in practical scenarios. In this paper, we propose the first large-scale 3D real car dataset, termed 3DRealCar, offering three distinctive features. (1) textbf{High-Volume}: 2,500 cars are meticulously scanned by 3D scanners, obtaining car images and point clouds with real-world dimensions; (2) textbf{High-Quality}: Each car is captured in an average of 200 dense, high-resolution 360-degree RGB-D views, enabling high-fidelity 3D reconstruction; (3) textbf{High-Diversity}: The dataset contains various cars from over 100 brands, collected under three distinct lighting conditions, including reflective, standard, and dark. Additionally, we offer detailed car parsing maps for each instance to promote research in car parsing tasks. Moreover, we remove background point clouds and standardize the car orientation to a unified axis for the reconstruction only on cars without background and controllable rendering. We benchmark 3D reconstruction results with state-of-the-art methods across each lighting condition in 3DRealCar. Extensive experiments demonstrate that the standard lighting condition part of 3DRealCar can be used to produce a large number of high-quality 3D cars, improving various 2D and 3D tasks related to cars. Notably, our dataset brings insight into the fact that recent 3D reconstruction methods face challenges in reconstructing high-quality 3D cars under reflective and dark lighting conditions. textcolor{red}{href{https://xiaobiaodu.github.io/3drealcar/}{Our dataset is available here.}}
Read more6/10/2024
0
BVI-RLV: A Fully Registered Dataset and Benchmarks for Low-Light Video Enhancement
Ruirui Lin, Nantheera Anantrasirichai, Guoxi Huang, Joanne Lin, Qi Sun, Alexandra Malyugina, David R Bull
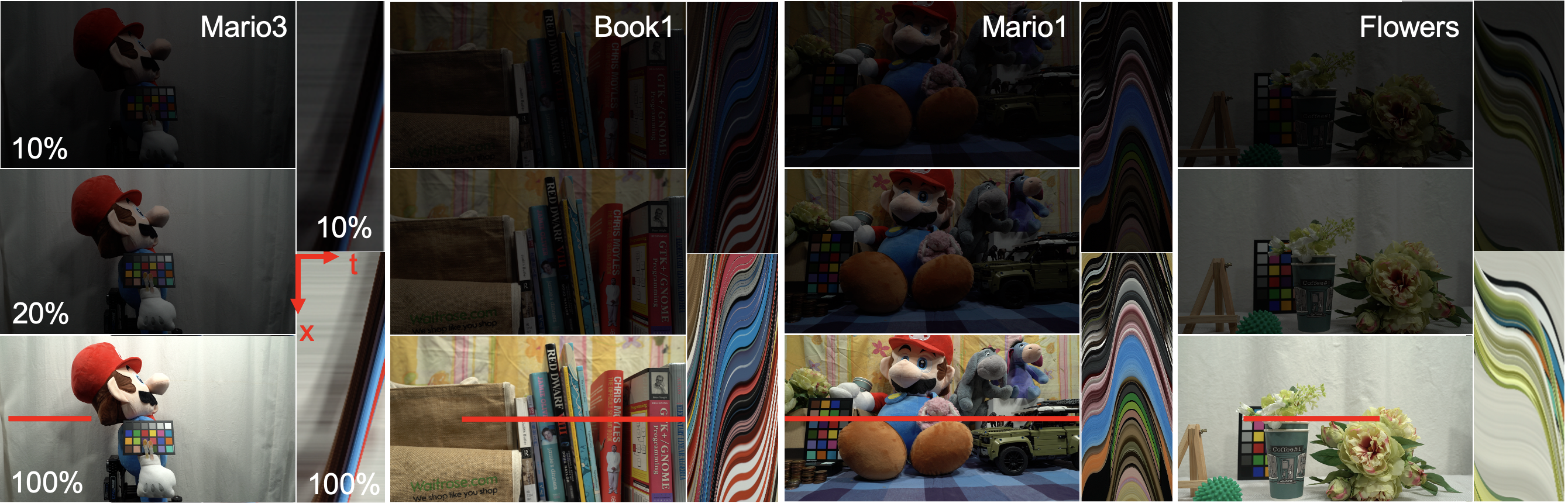
Low-light videos often exhibit spatiotemporal incoherent noise, compromising visibility and performance in computer vision applications. One significant challenge in enhancing such content using deep learning is the scarcity of training data. This paper introduces a novel low-light video dataset, consisting of 40 scenes with various motion scenarios under two distinct low-lighting conditions, incorporating genuine noise and temporal artifacts. We provide fully registered ground truth data captured in normal light using a programmable motorized dolly and refine it via an image-based approach for pixel-wise frame alignment across different light levels. We provide benchmarks based on four different technologies: convolutional neural networks, transformers, diffusion models, and state space models (mamba). Our experimental results demonstrate the significance of fully registered video pairs for low-light video enhancement (LLVE) and the comprehensive evaluation shows that the models trained with our dataset outperform those trained with the existing datasets. Our dataset and links to benchmarks are publicly available at https://doi.org/10.21227/mzny-8c77.
Read more7/30/2024