Toward a Predictive eXtended Reality Teleoperation System with Duo-Virtual Spaces

0

Sign in to get full access
Overview
- The paper proposes a predictive eXtended Reality (XR) teleoperation system with "duo-virtual spaces" to improve human-robot interaction and control.
- The system aims to enhance the user's perception and understanding of the remote environment by combining a virtual representation of the robot's view with a virtual model of the physical workspace.
- Key innovations include a predictive model to anticipate the robot's actions and a unique dual-virtual space interface for the user.
Plain English Explanation
The researchers have developed a new system that combines virtual reality (VR) and robotics to help people control robots from a distance. The idea is to give the human operator a better understanding of the remote environment and make it easier to control the robot.
The system has two "virtual spaces" that work together:
- Robot's View: A virtual representation of what the robot's cameras are seeing in the real world.
- Physical Workspace: A virtual model of the physical environment where the robot is located.
By having these two virtual spaces side-by-side, the human operator can better understand the robot's situation and make more informed decisions about how to control it. The system also uses a predictive model to anticipate the robot's future actions, which helps the operator stay one step ahead.
The goal is to create a more seamless and intuitive way for people to remotely control robots, especially in complex or dangerous environments where direct line-of-sight may not be possible. This could have applications in areas like search and rescue, hazardous material handling, and industrial automation.
Technical Explanation
The paper presents a novel "predictive eXtended Reality (XR) teleoperation system with duo-virtual spaces" to enhance human-robot interaction and control. The key components of the system are:
- Robot's Virtual View: A virtual representation of the environment as seen through the robot's cameras, providing the user with situational awareness.
- Physical Workspace Virtual Model: A virtual 3D model of the actual physical environment where the robot is located, allowing the user to better understand the robot's context and surroundings.
- Predictive Model: An algorithm that anticipates the robot's future actions and states, helping the user stay ahead of the robot's movements and more effectively control it.
The duo-virtual space interface displays these two virtual representations side-by-side, allowing the user to seamlessly switch between them and combine the information to gain a more complete understanding of the remote environment and the robot's capabilities and limitations.
The researchers conducted experiments to evaluate the system's performance, including assessing the user's sense of presence, workload, and task completion time. The results suggest that the predictive XR teleoperation system with duo-virtual spaces can enhance the user's perception, understanding, and control of the remote robot compared to traditional teleoperation approaches.
Critical Analysis
The paper presents a well-designed and promising approach to improving remote robot control through the use of predictive modeling and a dual-virtual space interface. The key strengths of the research include:
- Innovative System Design: The combination of a virtual robot view and a virtual workspace model, along with the predictive modeling component, represents a novel and potentially valuable approach to enhancing the user's situational awareness and control capabilities.
- Experimental Evaluation: The researchers conducted a thorough user study to assess the system's performance, providing empirical evidence to support the claimed benefits.
- Potential Applications: The proposed system could have significant implications for various domains where remote robot control is crucial, such as search and rescue, hazardous material handling, and industrial automation.
However, the paper also has some limitations that could be addressed in future research:
- Scalability and Generalizability: The experiments were conducted in a relatively simple, controlled environment. It's not clear how the system would perform in more complex, real-world scenarios with multiple robots or dynamic environments.
- Technical Details: The paper could provide more technical details about the predictive model, the virtual environment generation, and the integration of the duo-virtual spaces to allow for a deeper understanding of the system's underlying mechanisms.
- User Feedback and Refinement: The paper could benefit from a more in-depth discussion of user feedback and potential areas for further refinement and improvement of the system based on user needs and preferences.
Overall, the proposed predictive XR teleoperation system with duo-virtual spaces represents an innovative and promising approach to enhancing remote robot control. Further research and development in this direction could lead to significant advancements in human-robot interaction and teleoperation capabilities.
Conclusion
The paper presents a novel predictive eXtended Reality (XR) teleoperation system with "duo-virtual spaces" to improve human-robot interaction and control. By combining a virtual representation of the robot's view with a virtual model of the physical workspace, the system aims to enhance the user's perception and understanding of the remote environment.
The key innovations include a predictive model to anticipate the robot's actions and a unique dual-virtual space interface for the user. Experimental results suggest that this approach can enhance the user's sense of presence, reduce workload, and improve task completion time compared to traditional teleoperation methods.
While the paper demonstrates the potential of this system, further research is needed to address scalability, technical details, and user feedback to refine and expand the capabilities of this predictive XR teleoperation technology. Continued advancements in this area could have significant implications for a wide range of applications involving remote robot control, from search and rescue to industrial automation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Toward a Predictive eXtended Reality Teleoperation System with Duo-Virtual Spaces
Ziliang Zhang, Cong Liu, Hyoseung Kim
Extended Reality (XR) provides a more intuitive interaction method for teleoperating robots compared to traditional 2D controls. Recent studies have laid the groundwork for usable teleoperation with XR, but it fails in tasks requiring rapid motion and precise manipulations due to the large delay between user motion and agent feedback. In this work, we profile the end-to-end latency in a state-of-the-art XR teleoperation system and propose our idea to optimize the latency by implementing a duo-virtual spaces design and localizing the agent and objects in the user-side virtual space, while calibrating with periodic ground-truth poses from the agent-side virtual space.
Read more9/25/2024

0
XR Prototyping of Mixed Reality Visualizations: Compensating Interaction Latency for a Medical Imaging Robot
Jan Hendrik Plumer, Kevin Yu, Ulrich Eck, Denis Kalkofen, Philipp Steininger, Nassir Navab, Markus Tatzgern
Researching novel user experiences in medicine is challenging due to limited access to equipment and strict ethical protocols. Extended Reality (XR) simulation technologies offer a cost- and time-efficient solution for developing interactive systems. Recent work has shown Extended Reality Prototyping (XRP)'s potential, but its applicability to specific domains like controlling complex machinery needs further exploration. This paper explores the benefits and limitations of XRP in controlling a mobile medical imaging robot. We compare two XR visualization techniques to reduce perceived latency between user input and robot activation. Our XRP validation study demonstrates its potential for comparative studies, but identifies a gap in modeling human behavior in the analytic XRP validation framework.
Read more9/17/2024

0
Extended Reality for Enhanced Human-Robot Collaboration: a Human-in-the-Loop Approach
Yehor Karpichev, Todd Charter, Jayden Hong, Amir M. Soufi Enayati, Homayoun Honari, Mehran Ghafarian Tamizi, Homayoun Najjaran
The rise of automation has provided an opportunity to achieve higher efficiency in manufacturing processes, yet it often compromises the flexibility required to promptly respond to evolving market needs and meet the demand for customization. Human-robot collaboration attempts to tackle these challenges by combining the strength and precision of machines with human ingenuity and perceptual understanding. In this paper, we conceptualize and propose an implementation framework for an autonomous, machine learning-based manipulator that incorporates human-in-the-loop principles and leverages Extended Reality (XR) to facilitate intuitive communication and programming between humans and robots. Furthermore, the conceptual framework foresees human involvement directly in the robot learning process, resulting in higher adaptability and task generalization. The paper highlights key technologies enabling the proposed framework, emphasizing the importance of developing the digital ecosystem as a whole. Additionally, we review the existent implementation approaches of XR in human-robot collaboration, showcasing diverse perspectives and methodologies. The challenges and future outlooks are discussed, delving into the major obstacles and potential research avenues of XR for more natural human-robot interaction and integration in the industrial landscape.
Read more6/18/2024
0
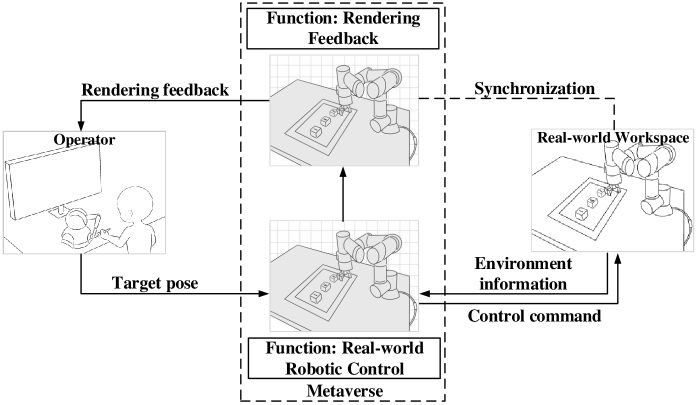
Real-Time Interactions Between Human Controllers and Remote Devices in Metaverse
Kan Chen, Zhen Meng, Xiangmin Xu, Changyang She, Philip G. Zhao
Supporting real-time interactions between human controllers and remote devices remains a challenging goal in the Metaverse due to the stringent requirements on computing workload, communication throughput, and round-trip latency. In this paper, we establish a novel framework for real-time interactions through the virtual models in the Metaverse. Specifically, we jointly predict the motion of the human controller for 1) proactive rendering in the Metaverse and 2) generating control commands to the real-world remote device in advance. The virtual model is decoupled into two components for rendering and control, respectively. To dynamically adjust the prediction horizons for rendering and control, we develop a two-step human-in-the-loop continuous reinforcement learning approach and use an expert policy to improve the training efficiency. An experimental prototype is built to verify our algorithm with different communication latencies. Compared with the baseline policy without prediction, our proposed method can reduce 1) the Motion-To-Photon (MTP) latency between human motion and rendering feedback and 2) the root mean squared error (RMSE) between human motion and real-world remote devices significantly.
Read more7/24/2024