Toward Robust LiDAR based 3D Object Detection via Density-Aware Adaptive Thresholding
2404.13852
0
0
Abstract
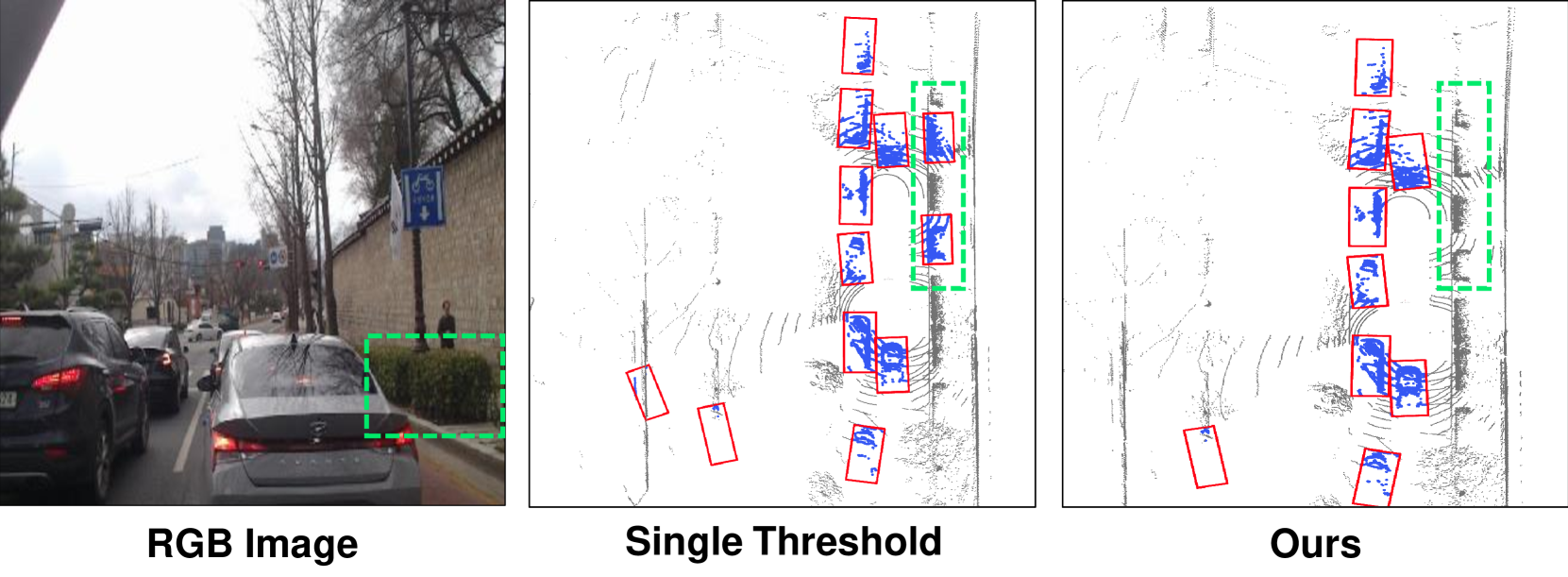
Robust 3D object detection is a core challenge for autonomous mobile systems in field robotics. To tackle this issue, many researchers have demonstrated improvements in 3D object detection performance in datasets. However, real-world urban scenarios with unstructured and dynamic situations can still lead to numerous false positives, posing a challenge for robust 3D object detection models. This paper presents a post-processing algorithm that dynamically adjusts object detection thresholds based on the distance from the ego-vehicle. 3D object detection models usually perform well in detecting nearby objects but may exhibit suboptimal performance for distant ones. While conventional perception algorithms typically employ a single threshold in post-processing, the proposed algorithm addresses this issue by employing adaptive thresholds based on the distance from the ego-vehicle, minimizing false negatives and reducing false positives in urban scenarios. The results show performance enhancements in 3D object detection models across a range of scenarios, not only in dynamic urban road conditions but also in scenarios involving adverse weather conditions.
Create account to get full access
Overview
- This paper proposes a novel algorithm for robust 3D object detection using LiDAR data.
- The key innovation is a density-aware adaptive thresholding technique that improves the detection of objects, especially in sparse point cloud regions.
- The proposed method outperforms state-of-the-art LiDAR-based 3D object detection approaches on several benchmark datasets.
Plain English Explanation
The paper focuses on improving 3D object detection using LiDAR sensors, which are commonly used in autonomous vehicles and robotics. LiDAR sensors measure the distance to objects by emitting laser beams and detecting the reflections. However, the performance of 3D object detection can degrade in regions with sparse point cloud data, such as far away from the sensor or in cluttered environments.
The researchers developed a new algorithm that addresses this challenge by using a "density-aware adaptive thresholding" technique. This means the method automatically adjusts the threshold for detecting objects based on the local density of the point cloud data. In areas with sparse data, the threshold is lowered to better capture objects that might otherwise be missed. Conversely, in dense regions, the threshold is increased to avoid false positives.
By adapting the detection threshold in this way, the new algorithm is able to maintain robust 3D object detection performance across a wide range of environments and scenes. The paper demonstrates that this approach outperforms existing state-of-the-art LiDAR-based 3D object detection methods on several benchmark datasets.
Technical Explanation
The paper presents a novel LiDAR-based 3D object detection algorithm that uses a density-aware adaptive thresholding technique. The key insight is that a fixed detection threshold, as used in many prior approaches, can lead to poor performance in regions with sparse point cloud data.
To address this, the proposed method first estimates the local density of the point cloud using a Gaussian kernel density estimation. It then dynamically adjusts the detection threshold based on this density estimate, lowering the threshold in sparse regions and increasing it in dense regions.
This density-aware adaptive thresholding is integrated into a two-stage 3D object detection pipeline. First, a region proposal network generates 3D bounding box proposals. Then, the adaptive thresholding is applied to filter out low-confidence proposals, followed by non-maximum suppression to produce the final detections.
The authors evaluate their approach on the KITTI and Waymo Open datasets, showing significant improvements over state-of-the-art methods like Sparse Points to Dense Clouds, Better Monocular 3D Detectors, and MultiModal 3D Object Detection. Particularly large gains are observed for distant and occluded objects, demonstrating the benefits of the density-aware thresholding.
Critical Analysis
The paper presents a well-designed and effective solution to address the challenge of robust 3D object detection in LiDAR point clouds. The density-aware adaptive thresholding is a clever and intuitive approach that nicely complements existing region proposal and object detection techniques.
One potential limitation is that the method relies on accurate density estimation, which could be sensitive to noise or outliers in the point cloud data. The authors do not extensively discuss the robustness of their density estimation approach. Additionally, the computational overhead of the density estimation and adaptive thresholding steps is not quantified, which could be an important practical consideration.
Further research could explore integrating the density-aware thresholding with end-to-end deep learning architectures, rather than as a post-processing step. This may allow the network to learn optimal thresholding strategies directly from the data. Investigating the method's performance on a wider range of environments, object sizes, and occlusion levels would also help validate its broader applicability.
Overall, this paper presents a valuable contribution to the field of LiDAR-based 3D object detection, with a novel and effective technique that can improve robustness in challenging real-world scenarios.
Conclusion
This research paper introduces a density-aware adaptive thresholding approach that significantly improves the performance of LiDAR-based 3D object detection, particularly in regions with sparse point cloud data. By dynamically adjusting the detection threshold based on local point cloud density, the proposed method is able to maintain robust detection across a wide range of environments.
The authors demonstrate the effectiveness of their approach on standard benchmark datasets, showing substantial gains over existing state-of-the-art methods. This work highlights the importance of accounting for data sparsity and heterogeneity when designing 3D perception systems, and provides a promising direction for further research and development in this area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔎
Enhancing 3D Object Detection by Using Neural Network with Self-adaptive Thresholding
Houze Liu, Chongqing Wang, Xiaoan Zhan, Haotian Zheng, Chang Che
0
0
Robust 3D object detection remains a pivotal concern in the domain of autonomous field robotics. Despite notable enhancements in detection accuracy across standard datasets, real-world urban environments, characterized by their unstructured and dynamic nature, frequently precipitate an elevated incidence of false positives, thereby undermining the reliability of existing detection paradigms. In this context, our study introduces an advanced post-processing algorithm that modulates detection thresholds dynamically relative to the distance from the ego object. Traditional perception systems typically utilize a uniform threshold, which often leads to decreased efficacy in detecting distant objects. In contrast, our proposed methodology employs a Neural Network with a self-adaptive thresholding mechanism that significantly attenuates false negatives while concurrently diminishing false positives, particularly in complex urban settings. Empirical results substantiate that our algorithm not only augments the performance of 3D object detection models in diverse urban and adverse weather scenarios but also establishes a new benchmark for adaptive thresholding techniques in field robotics.
5/14/2024

Sparse Points to Dense Clouds: Enhancing 3D Detection with Limited LiDAR Data
Aakash Kumar, Chen Chen, Ajmal Mian, Neils Lobo, Mubarak Shah
0
0
3D detection is a critical task that enables machines to identify and locate objects in three-dimensional space. It has a broad range of applications in several fields, including autonomous driving, robotics and augmented reality. Monocular 3D detection is attractive as it requires only a single camera, however, it lacks the accuracy and robustness required for real world applications. High resolution LiDAR on the other hand, can be expensive and lead to interference problems in heavy traffic given their active transmissions. We propose a balanced approach that combines the advantages of monocular and point cloud-based 3D detection. Our method requires only a small number of 3D points, that can be obtained from a low-cost, low-resolution sensor. Specifically, we use only 512 points, which is just 1% of a full LiDAR frame in the KITTI dataset. Our method reconstructs a complete 3D point cloud from this limited 3D information combined with a single image. The reconstructed 3D point cloud and corresponding image can be used by any multi-modal off-the-shelf detector for 3D object detection. By using the proposed network architecture with an off-the-shelf multi-modal 3D detector, the accuracy of 3D detection improves by 20% compared to the state-of-the-art monocular detection methods and 6% to 9% compare to the baseline multi-modal methods on KITTI and JackRabbot datasets.
4/11/2024
📊
Empowering Urban Traffic Management: Elevated 3D LiDAR for Data Collection and Advanced Object Detection Analysis
Nawfal Guefrachi, Hakim Ghazzai, Ahmad Alsharoa
0
0
The 3D object detection capabilities in urban environments have been enormously improved by recent developments in Light Detection and Range (LiDAR) technology. This paper presents a novel framework that transforms the detection and analysis of 3D objects in traffic scenarios by utilizing the power of elevated LiDAR sensors. We are presenting our methodology's remarkable capacity to collect complex 3D point cloud data, which allows us to accurately and in detail capture the dynamics of urban traffic. Due to the limitation in obtaining real-world traffic datasets, we utilize the simulator to generate 3D point cloud for specific scenarios. To support our experimental analysis, we firstly simulate various 3D point cloud traffic-related objects. Then, we use this dataset as a basis for training and evaluating our 3D object detection models, in identifying and monitoring both vehicles and pedestrians in simulated urban traffic environments. Next, we fine tune the Point Voxel-Region-based Convolutional Neural Network (PV-RCNN) architecture, making it more suited to handle and understand the massive volumes of point cloud data generated by our urban traffic simulations. Our results show the effectiveness of the proposed solution in accurately detecting objects in traffic scenes and highlight the role of LiDAR in improving urban safety and advancing intelligent transportation systems.
5/24/2024
UADA3D: Unsupervised Adversarial Domain Adaptation for 3D Object Detection with Sparse LiDAR and Large Domain Gaps
Maciej K Wozniak, Mattias Hansson, Marko Thiel, Patric Jensfelt
0
0
In this study, we address a gap in existing unsupervised domain adaptation approaches on LiDAR-based 3D object detection, which have predominantly concentrated on adapting between established, high-density autonomous driving datasets. We focus on sparser point clouds, capturing scenarios from different perspectives: not just from vehicles on the road but also from mobile robots on sidewalks, which encounter significantly different environmental conditions and sensor configurations. We introduce Unsupervised Adversarial Domain Adaptation for 3D Object Detection (UADA3D). UADA3D does not depend on pre-trained source models or teacher-student architectures. Instead, it uses an adversarial approach to directly learn domain-invariant features. We demonstrate its efficacy in various adaptation scenarios, showing significant improvements in both self-driving car and mobile robot domains. Our code is open-source and will be available soon.
6/13/2024