Empowering Urban Traffic Management: Elevated 3D LiDAR for Data Collection and Advanced Object Detection Analysis
2405.13202
0
0
📊
Abstract
The 3D object detection capabilities in urban environments have been enormously improved by recent developments in Light Detection and Range (LiDAR) technology. This paper presents a novel framework that transforms the detection and analysis of 3D objects in traffic scenarios by utilizing the power of elevated LiDAR sensors. We are presenting our methodology's remarkable capacity to collect complex 3D point cloud data, which allows us to accurately and in detail capture the dynamics of urban traffic. Due to the limitation in obtaining real-world traffic datasets, we utilize the simulator to generate 3D point cloud for specific scenarios. To support our experimental analysis, we firstly simulate various 3D point cloud traffic-related objects. Then, we use this dataset as a basis for training and evaluating our 3D object detection models, in identifying and monitoring both vehicles and pedestrians in simulated urban traffic environments. Next, we fine tune the Point Voxel-Region-based Convolutional Neural Network (PV-RCNN) architecture, making it more suited to handle and understand the massive volumes of point cloud data generated by our urban traffic simulations. Our results show the effectiveness of the proposed solution in accurately detecting objects in traffic scenes and highlight the role of LiDAR in improving urban safety and advancing intelligent transportation systems.
Create account to get full access
Overview
- This paper presents a novel framework that transforms the detection and analysis of 3D objects in urban traffic scenarios by utilizing elevated LiDAR sensors.
- The authors utilize a traffic simulation to generate 3D point cloud data, which they then use to train and evaluate their 3D object detection models.
- The proposed solution aims to accurately detect both vehicles and pedestrians in simulated urban traffic environments, highlighting the role of LiDAR in improving urban safety and advancing intelligent transportation systems.
Plain English Explanation
The paper discusses how recent advancements in Light Detection and Range (LiDAR) technology have significantly improved the ability to detect and analyze 3D objects in urban environments. The researchers have developed a new system that leverages elevated LiDAR sensors to collect detailed 3D point cloud data of traffic scenarios.
Since it can be challenging to obtain real-world traffic datasets, the researchers use a traffic simulation to generate the necessary 3D point cloud data. They then use this simulated data to train and evaluate their 3D object detection models, which are designed to identify and monitor both vehicles and pedestrians in urban traffic environments.
The key component of their approach is the Point Voxel-Region-based Convolutional Neural Network (PV-RCNN), which the researchers have adapted to handle the large volumes of point cloud data generated by their traffic simulations. The results show that this solution can accurately detect objects in traffic scenes, highlighting the potential of LiDAR technology to improve urban safety and advance intelligent transportation systems.
Technical Explanation
The researchers present a novel framework that utilizes elevated LiDAR sensors to collect complex 3D point cloud data, which allows them to accurately capture the dynamics of urban traffic. Due to the difficulty in obtaining real-world traffic datasets, they use a traffic simulation to generate the necessary 3D point cloud data for their experiments.
The researchers first simulate various 3D point cloud traffic-related objects, including vehicles and pedestrians. They then use this simulated dataset as the basis for training and evaluating their 3D object detection models. The key component of their approach is the PV-RCNN architecture, which they fine-tune to handle the large volumes of point cloud data generated by their urban traffic simulations.
The results of their experiments demonstrate the effectiveness of the proposed solution in accurately detecting objects in traffic scenes. The researchers highlight the role of LiDAR technology in improving urban safety and advancing intelligent transportation systems, as evidenced by the improved performance of 3D object detection compared to previous approaches.
Critical Analysis
The paper presents a promising approach to leveraging LiDAR technology for 3D object detection in urban traffic scenarios. However, the authors acknowledge the limitation of using simulated data instead of real-world traffic datasets, which may not fully capture the complexity and variability of real-world conditions.
Additionally, while the PV-RCNN architecture has been shown to be effective in handling large volumes of point cloud data, the researchers do not provide a detailed analysis of the computational resources required to deploy such a system in a real-world setting. This could be a crucial consideration for the practical implementation of the proposed solution.
Furthermore, the paper does not address the potential impact of environmental factors, such as weather conditions or lighting changes, on the performance of the 3D object detection models. These factors could be important considerations for the robustness and reliability of the system in real-world scenarios.
Conclusion
This paper presents a novel framework that leverages elevated LiDAR sensors to collect detailed 3D point cloud data of urban traffic scenarios, which is then used to train and evaluate 3D object detection models. The researchers have demonstrated the effectiveness of their approach in accurately detecting vehicles and pedestrians in simulated urban environments, highlighting the potential of LiDAR technology to improve urban safety and advance intelligent transportation systems.
While the paper provides a promising proof-of-concept, further research is needed to address the limitations of using simulated data and to explore the practical considerations for deploying such a system in real-world settings. Nonetheless, this work contributes to the ongoing advancements in 3D object detection and the broader field of intelligent transportation systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Sparse Points to Dense Clouds: Enhancing 3D Detection with Limited LiDAR Data
Aakash Kumar, Chen Chen, Ajmal Mian, Neils Lobo, Mubarak Shah
0
0
3D detection is a critical task that enables machines to identify and locate objects in three-dimensional space. It has a broad range of applications in several fields, including autonomous driving, robotics and augmented reality. Monocular 3D detection is attractive as it requires only a single camera, however, it lacks the accuracy and robustness required for real world applications. High resolution LiDAR on the other hand, can be expensive and lead to interference problems in heavy traffic given their active transmissions. We propose a balanced approach that combines the advantages of monocular and point cloud-based 3D detection. Our method requires only a small number of 3D points, that can be obtained from a low-cost, low-resolution sensor. Specifically, we use only 512 points, which is just 1% of a full LiDAR frame in the KITTI dataset. Our method reconstructs a complete 3D point cloud from this limited 3D information combined with a single image. The reconstructed 3D point cloud and corresponding image can be used by any multi-modal off-the-shelf detector for 3D object detection. By using the proposed network architecture with an off-the-shelf multi-modal 3D detector, the accuracy of 3D detection improves by 20% compared to the state-of-the-art monocular detection methods and 6% to 9% compare to the baseline multi-modal methods on KITTI and JackRabbot datasets.
4/11/2024
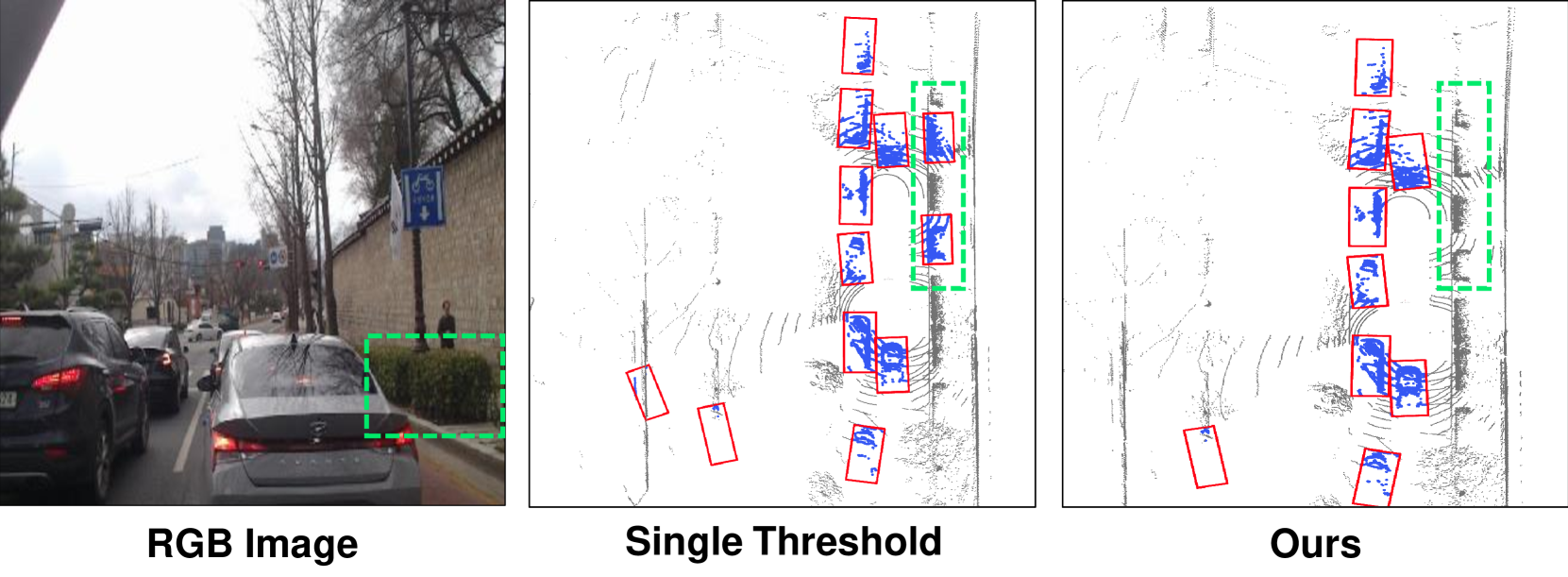
Toward Robust LiDAR based 3D Object Detection via Density-Aware Adaptive Thresholding
Eunho Lee, Minwoo Jung, Ayoung Kim
0
0
Robust 3D object detection is a core challenge for autonomous mobile systems in field robotics. To tackle this issue, many researchers have demonstrated improvements in 3D object detection performance in datasets. However, real-world urban scenarios with unstructured and dynamic situations can still lead to numerous false positives, posing a challenge for robust 3D object detection models. This paper presents a post-processing algorithm that dynamically adjusts object detection thresholds based on the distance from the ego-vehicle. 3D object detection models usually perform well in detecting nearby objects but may exhibit suboptimal performance for distant ones. While conventional perception algorithms typically employ a single threshold in post-processing, the proposed algorithm addresses this issue by employing adaptive thresholds based on the distance from the ego-vehicle, minimizing false negatives and reducing false positives in urban scenarios. The results show performance enhancements in 3D object detection models across a range of scenarios, not only in dynamic urban road conditions but also in scenarios involving adverse weather conditions.
4/23/2024

Generative AI Empowered LiDAR Point Cloud Generation with Multimodal Transformer
Mohammad Farzanullah, Han Zhang, Akram Bin Sediq, Ali Afana, Melike Erol-Kantarci
0
0
Integrated sensing and communications is a key enabler for the 6G wireless communication systems. The multiple sensing modalities will allow the base station to have a more accurate representation of the environment, leading to context-aware communications. Some widely equipped sensors such as cameras and RADAR sensors can provide some environmental perceptions. However, they are not enough to generate precise environmental representations, especially in adverse weather conditions. On the other hand, the LiDAR sensors provide more accurate representations, however, their widespread adoption is hindered by their high cost. This paper proposes a novel approach to enhance the wireless communication systems by synthesizing LiDAR point clouds from images and RADAR data. Specifically, it uses a multimodal transformer architecture and pre-trained encoding models to enable an accurate LiDAR generation. The proposed framework is evaluated on the DeepSense 6G dataset, which is a real-world dataset curated for context-aware wireless applications. Our results demonstrate the efficacy of the proposed approach in accurately generating LiDAR point clouds. We achieve a modified mean squared error of 10.3931. Visual examination of the images indicates that our model can successfully capture the majority of structures present in the LiDAR point cloud for diverse environments. This will enable the base stations to achieve more precise environmental sensing. By integrating LiDAR synthesis with existing sensing modalities, our method can enhance the performance of various wireless applications, including beam and blockage prediction.
6/28/2024
🔎
Multi-Object Tracking based on Imaging Radar 3D Object Detection
Patrick Palmer, Martin Kruger, Richard Altendorfer, Torsten Bertram
0
0
Effective tracking of surrounding traffic participants allows for an accurate state estimation as a necessary ingredient for prediction of future behavior and therefore adequate planning of the ego vehicle trajectory. One approach for detecting and tracking surrounding traffic participants is the combination of a learning based object detector with a classical tracking algorithm. Learning based object detectors have been shown to work adequately on lidar and camera data, while learning based object detectors using standard radar data input have proven to be inferior. Recently, with the improvements to radar sensor technology in the form of imaging radars, the object detection performance on radar was greatly improved but is still limited compared to lidar sensors due to the sparsity of the radar point cloud. This presents a unique challenge for the task of multi-object tracking. The tracking algorithm must overcome the limited detection quality while generating consistent tracks. To this end, a comparison between different multi-object tracking methods on imaging radar data is required to investigate its potential for downstream tasks. The work at hand compares multiple approaches and analyzes their limitations when applied to imaging radar data. Furthermore, enhancements to the presented approaches in the form of probabilistic association algorithms are considered for this task.
6/4/2024