Towards Category Unification of 3D Single Object Tracking on Point Clouds

0

Sign in to get full access
Overview
- This paper proposes a new approach to 3D single object tracking on point clouds that aims to unify different object categories.
- Existing methods often focus on specific object categories, but the authors argue this limits their real-world applicability.
- The proposed method aims to be more general and able to track a diverse set of objects.
Plain English Explanation
The paper introduces a new technique for tracking the location of a single 3D object over time using point cloud data. Point clouds are 3D representations of the environment made up of many individual data points.
Current 3D object tracking methods often work well for specific types of objects, like cars or pedestrians, but struggle when applied to other categories. The authors propose a more general approach that can handle a wider variety of objects. The key idea is to design a tracking system that is not specialized for any particular object type.
This allows the same underlying technology to be applied to tracking different things, like people, furniture, or even random objects, without needing to retrain or significantly modify the system. The authors believe this will make 3D object tracking more practical and useful in real-world applications where the target objects are unpredictable.
Technical Explanation
The paper proposes a Transformer-based architecture for 3D single object tracking that uses point clouds as input. The core innovation is a category-agnostic design that aims to unify tracking performance across different object types.
The model takes the current frame's point cloud and the previous frame's point cloud and predicted object state as input. It then uses self-attention mechanisms to extract meaningful features and predict the object's new position, orientation, and size in the current frame.
Crucially, the model does not have any explicit object category information built into its architecture. This allows it to be applied to a wide variety of objects without needing to be retrained or significantly modified.
The authors evaluate their approach on several 3D object tracking benchmarks covering diverse object categories. They show that their method can achieve state-of-the-art performance while being more generalizable than prior work.
Critical Analysis
The authors acknowledge that their category-unifying approach may come at the cost of slightly reduced tracking accuracy compared to highly specialized methods. However, they argue that the gain in flexibility and generalization is worth this trade-off for many real-world applications.
One potential limitation is that the model may struggle with very atypical or novel object shapes that are very different from what it has seen during training. The authors do not extensively explore this scenario in their experiments.
Additionally, the paper does not provide a detailed ablation study to understand which components of the architecture are most crucial for the reported performance. Further research could help elucidate the key design choices that enable the model's category-agnostic capabilities.
Overall, the work presents a promising step towards more flexible and deployable 3D object tracking systems. Encouraging users to think critically about the research and its limitations is important for advancing the field.
Conclusion
This paper introduces a new Transformer-based architecture for 3D single object tracking that aims to unify performance across diverse object categories. By avoiding specialized object representations, the model can be applied to track a wide variety of things in the real world without needing to be significantly modified.
The authors demonstrate strong results on standard benchmarks, suggesting this category-agnostic approach is a viable path forward for making 3D object tracking more practical and widely applicable. While there are some limitations to explore, this work represents an important step towards more flexible and generalizable 3D object tracking capabilities.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Towards Category Unification of 3D Single Object Tracking on Point Clouds
Jiahao Nie, Zhiwei He, Xudong Lv, Xueyi Zhou, Dong-Kyu Chae, Fei Xie
Category-specific models are provenly valuable methods in 3D single object tracking (SOT) regardless of Siamese or motion-centric paradigms. However, such over-specialized model designs incur redundant parameters, thus limiting the broader applicability of 3D SOT task. This paper first introduces unified models that can simultaneously track objects across all categories using a single network with shared model parameters. Specifically, we propose to explicitly encode distinct attributes associated to different object categories, enabling the model to adapt to cross-category data. We find that the attribute variances of point cloud objects primarily occur from the varying size and shape (e.g., large and square vehicles v.s. small and slender humans). Based on this observation, we design a novel point set representation learning network inheriting transformer architecture, termed AdaFormer, which adaptively encodes the dynamically varying shape and size information from cross-category data in a unified manner. We further incorporate the size and shape prior derived from the known template targets into the model's inputs and learning objective, facilitating the learning of unified representation. Equipped with such designs, we construct two category-unified models SiamCUT and MoCUT.Extensive experiments demonstrate that SiamCUT and MoCUT exhibit strong generalization and training stability. Furthermore, our category-unified models outperform the category-specific counterparts by a significant margin (e.g., on KITTI dataset, 12% and 3% performance gains on the Siamese and motion paradigms). Our code will be available.
Read more9/10/2024
🌐
0
OST: Efficient One-stream Network for 3D Single Object Tracking in Point Clouds
Xiantong Zhao, Yinan Han, Shengjing Tian, Jian Liu, Xiuping Liu
Although recent Siamese network-based trackers have achieved impressive perceptual accuracy for single object tracking in LiDAR point clouds, they usually utilized heavy correlation operations to capture category-level characteristics only, and overlook the inherent merit of arbitrariness in contrast to multiple object tracking. In this work, we propose a radically novel one-stream network with the strength of the instance-level encoding, which avoids the correlation operations occurring in previous Siamese network, thus considerably reducing the computational effort. In particular, the proposed method mainly consists of a Template-aware Transformer Module (TTM) and a Multi-scale Feature Aggregation (MFA) module capable of fusing spatial and semantic information. The TTM stitches the specified template and the search region together and leverages an attention mechanism to establish the information flow, breaking the previous pattern of independent textit{extraction-and-correlation}. As a result, this module makes it possible to directly generate template-aware features that are suitable for the arbitrary and continuously changing nature of the target, enabling the model to deal with unseen categories. In addition, the MFA is proposed to make spatial and semantic information complementary to each other, which is characterized by reverse directional feature propagation that aggregates information from shallow to deep layers. Extensive experiments on KITTI and nuScenes demonstrate that our method has achieved considerable performance not only for class-specific tracking but also for class-agnostic tracking with less computation and higher efficiency.
Read more6/10/2024
0
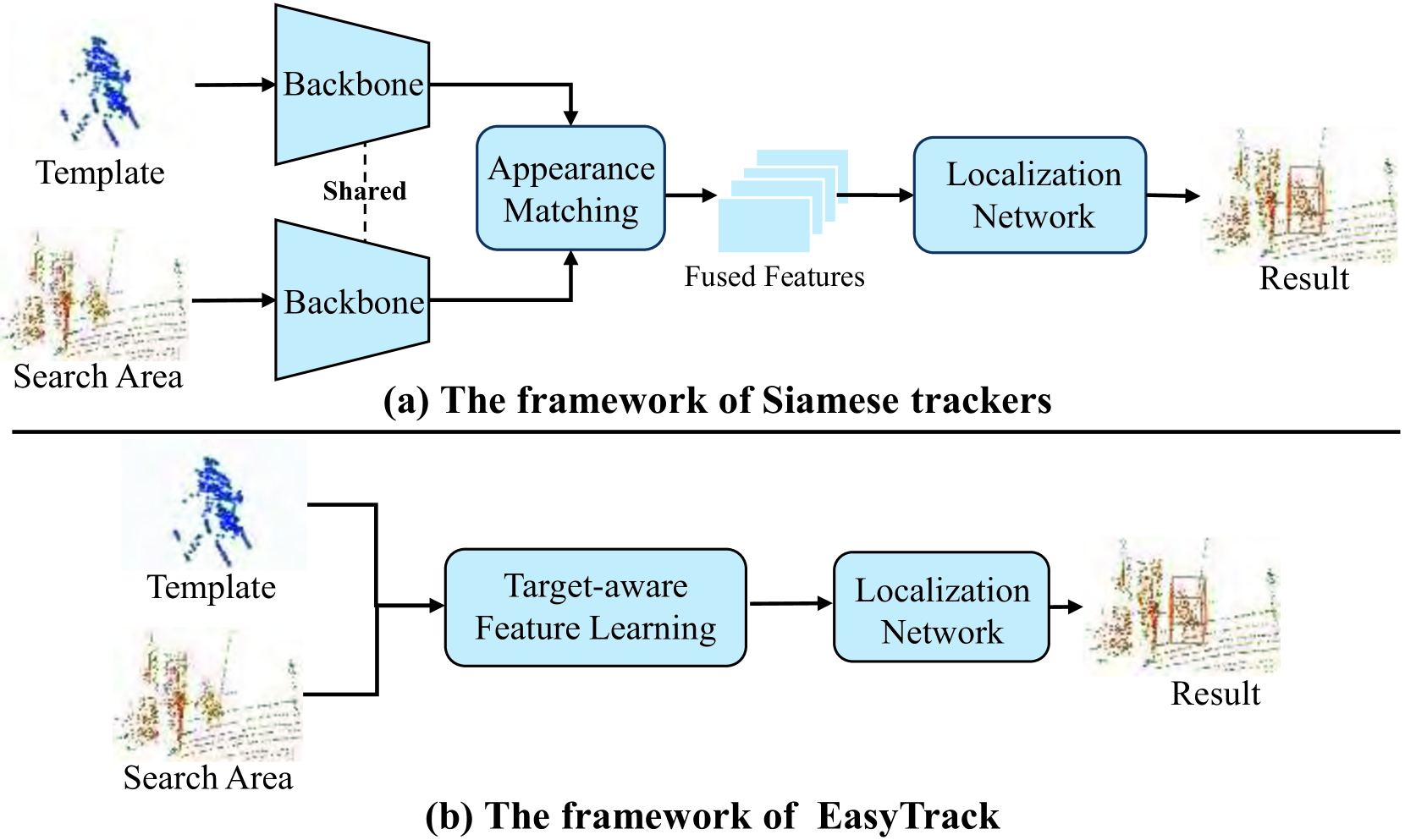
EasyTrack: Efficient and Compact One-stream 3D Point Clouds Tracker
Baojie Fan, Wuyang Zhou, Kai Wang, Shijun Zhou, Fengyu Xu, Jiandong Tian
Most of 3D single object trackers (SOT) in point clouds follow the two-stream multi-stage 3D Siamese or motion tracking paradigms, which process the template and search area point clouds with two parallel branches, built on supervised point cloud backbones. In this work, beyond typical 3D Siamese or motion tracking, we propose a neat and compact one-stream transformer 3D SOT paradigm from the novel perspective, termed as textbf{EasyTrack}, which consists of three special designs: 1) A 3D point clouds tracking feature pre-training module is developed to exploit the masked autoencoding for learning 3D point clouds tracking representations. 2) A unified 3D tracking feature learning and fusion network is proposed to simultaneously learns target-aware 3D features, and extensively captures mutual correlation through the flexible self-attention mechanism. 3) A target location network in the dense bird's eye view (BEV) feature space is constructed for target classification and regression. Moreover, we develop an enhanced version named EasyTrack++, which designs the center points interaction (CPI) strategy to reduce the ambiguous targets caused by the noise point cloud background information. The proposed EasyTrack and EasyTrack++ set a new state-of-the-art performance ($textbf{18%}$, $textbf{40%}$ and $textbf{3%}$ success gains) in KITTI, NuScenes, and Waymo while runing at textbf{52.6fps} with few parameters (textbf{1.3M}). The code will be available at https://github.com/KnightApple427/Easytrack.
Read more4/15/2024
0
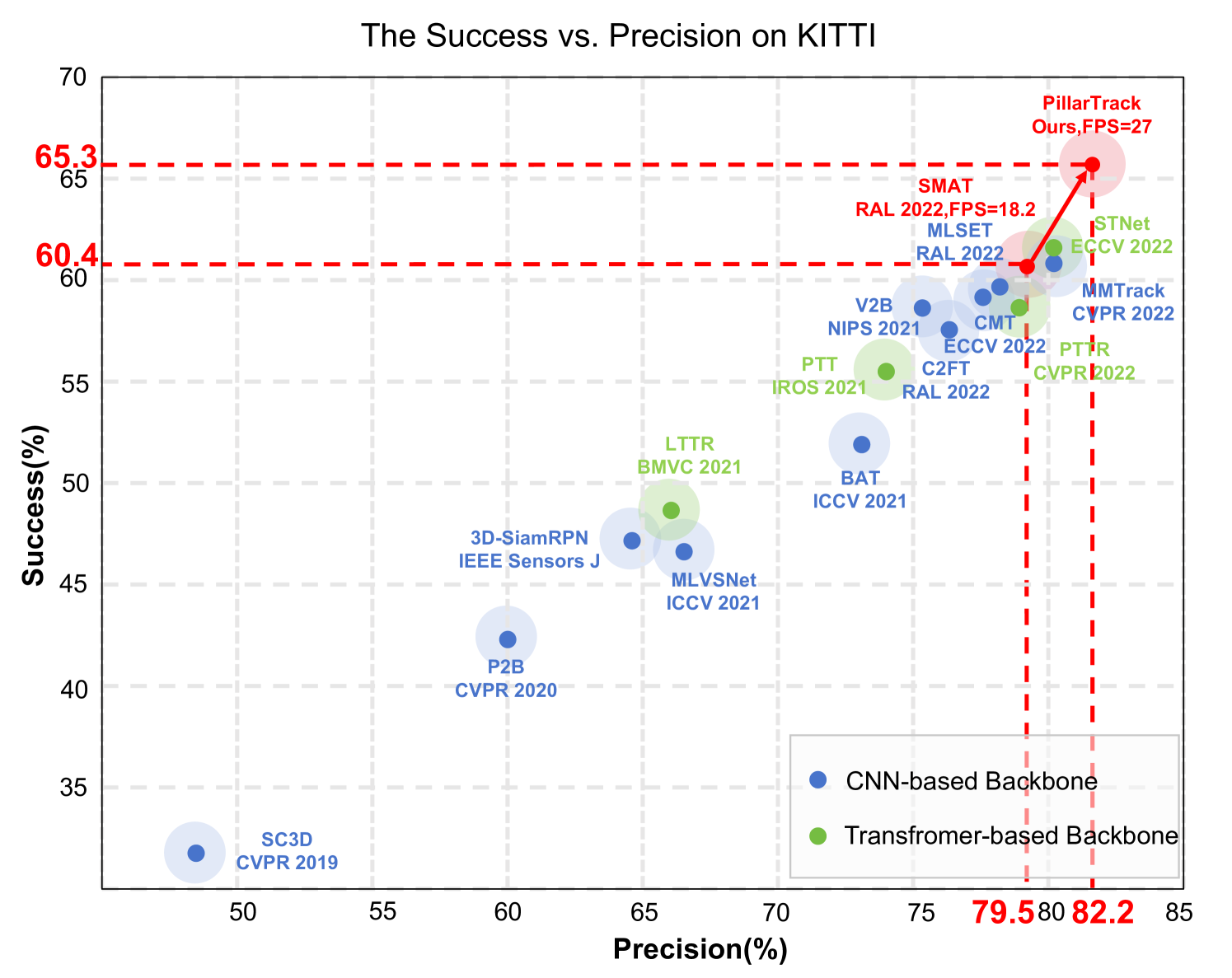
PillarTrack: Redesigning Pillar-based Transformer Network for Single Object Tracking on Point Clouds
Weisheng Xu, Sifan Zhou, Zhihang Yuan
LiDAR-based 3D single object tracking (3D SOT) is a critical issue in robotics and autonomous driving. It aims to obtain accurate 3D BBox from the search area based on similarity or motion. However, existing 3D SOT methods usually follow the point-based pipeline, where the sampling operation inevitably leads to redundant or lost information, resulting in unexpected performance. To address these issues, we propose PillarTrack, a pillar-based 3D single object tracking framework. Firstly, we transform sparse point clouds into dense pillars to preserve the local and global geometrics. Secondly, we introduce a Pyramid-type Encoding Pillar Feature Encoder (PE-PFE) design to help the feature representation of each pillar. Thirdly, we present an efficient Transformer-based backbone from the perspective of modality differences. Finally, we construct our PillarTrack tracker based above designs. Extensive experiments on the KITTI and nuScenes dataset demonstrate the superiority of our proposed method. Notably, our method achieves state-of-the-art performance on the KITTI and nuScenes dataset and enables real-time tracking speed. We hope our work could encourage the community to rethink existing 3D SOT tracker designs.We will open source our code to the research community in https://github.com/StiphyJay/PillarTrack.
Read more4/12/2024