Towards Single-Lens Controllable Depth-of-Field Imaging via All-in-Focus Aberration Correction and Monocular Depth Estimation

0

Sign in to get full access
Overview
- This paper presents a novel approach for single-lens controllable depth-of-field (DoF) imaging.
- The method combines all-in-focus aberration correction and monocular depth estimation to enable flexible control over the DoF.
- This allows for the creation of images with an adjustable, user-defined DoF from a single camera.
Plain English Explanation
The paper describes a new way to take photos that let you control the depth of field, or the area of the image that is in sharp focus. Typically, this is done by using different camera lenses or adjusting the aperture size. However, the researchers have developed a technique that can do this using just a single camera lens.
The key innovation is the combination of two main components: all-in-focus aberration correction and monocular depth estimation. The aberration correction ensures the entire image is in focus, while the depth estimation provides information about how far away different objects are from the camera.
By using these two techniques together, the researchers can computationally adjust the depth of field after the image is captured. This allows the photographer to choose how much of the scene they want to be in sharp focus, even after the photo has been taken. This flexibility could be very useful in various photography applications, from portraits to landscape shots.
Technical Explanation
The key technical components of this approach are:
-
All-in-Focus Aberration Correction: The researchers develop a novel optical design that corrects for various aberrations (imperfections) in the lens system. This ensures the entire image is in focus, rather than just a small region.
-
Monocular Depth Estimation: Using a deep learning-based monocular depth estimation model, the system can predict the depth of each pixel in the image from a single camera view.
-
Depth-of-Field Control: By combining the all-in-focus image and the depth map, the researchers can computationally adjust the depth of field after capture. This allows the user to selectively blur the foreground or background as desired.
The researchers validate their approach through extensive experiments, demonstrating the ability to create high-quality images with flexible, user-controlled depth of field from a single camera.
Critical Analysis
The paper presents a well-designed and thorough study, addressing the important challenge of enabling depth of field control with a single camera. However, a few potential limitations and considerations are worth noting:
-
Depth Estimation Accuracy: The performance of the depth estimation model is critical to the overall system. While the results seem promising, further research may be needed to improve the accuracy and robustness of monocular depth prediction.
-
Hardware Complexity: While the use of a single lens is a key advantage, the optical design required for the all-in-focus aberration correction may add some complexity to the hardware implementation.
-
Real-Time Performance: The current system likely requires significant computational resources for the depth estimation and DoF adjustment. Exploring ways to improve the processing speed could enable real-time or near-real-time applications.
-
Potential Artifacts: The computational manipulation of the depth of field could potentially introduce visual artifacts, such as unnatural-looking blurring or edge effects. Careful optimization and validation would be needed to ensure high-quality results.
Overall, this research represents an important step towards more flexible and accessible depth of field control in single-lens imaging systems, with promising applications in photography, videography, and computational photography.
Conclusion
This paper presents a novel approach for single-lens controllable depth-of-field imaging, combining all-in-focus aberration correction and monocular depth estimation. The proposed system allows users to flexibly adjust the depth of field after capturing an image, providing a new level of creative control over the photographic process.
The technical innovations, thorough experimental validation, and potential real-world applications make this a significant contribution to the field of computational photography. Further advancements in depth estimation accuracy, hardware integration, and real-time performance could unlock even more exciting possibilities for this type of technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Towards Single-Lens Controllable Depth-of-Field Imaging via All-in-Focus Aberration Correction and Monocular Depth Estimation
Xiaolong Qian, Qi Jiang, Yao Gao, Shaohua Gao, Zhonghua Yi, Lei Sun, Kai Wei, Haifeng Li, Kailun Yang, Kaiwei Wang, Jian Bai
Controllable Depth-of-Field (DoF) imaging commonly produces amazing visual effects based on heavy and expensive high-end lenses. However, confronted with the increasing demand for mobile scenarios, it is desirable to achieve a lightweight solution with Minimalist Optical Systems (MOS). This work centers around two major limitations of MOS, i.e., the severe optical aberrations and uncontrollable DoF, for achieving single-lens controllable DoF imaging via computational methods. A Depth-aware Controllable DoF Imaging (DCDI) framework is proposed equipped with All-in-Focus (AiF) aberration correction and monocular depth estimation, where the recovered image and corresponding depth map are utilized to produce imaging results under diverse DoFs of any high-end lens via patch-wise convolution. To address the depth-varying optical degradation, we introduce a Depth-aware Degradation-adaptive Training (DA2T) scheme. At the dataset level, a Depth-aware Aberration MOS (DAMOS) dataset is established based on the simulation of Point Spread Functions (PSFs) under different object distances. Additionally, we design two plug-and-play depth-aware mechanisms to embed depth information into the aberration image recovery for better tackling depth-aware degradation. Furthermore, we propose a storage-efficient Omni-Lens-Field model to represent the 4D PSF library of various lenses. With the predicted depth map, recovered image, and depth-aware PSF map inferred by Omni-Lens-Field, single-lens controllable DoF imaging is achieved. Comprehensive experimental results demonstrate that the proposed framework enhances the recovery performance, and attains impressive single-lens controllable DoF imaging results, providing a seminal baseline for this field. The source code and the established dataset will be publicly available at https://github.com/XiaolongQian/DCDI.
Read more9/17/2024

0
DOF-GS: Adjustable Depth-of-Field 3D Gaussian Splatting for Refocusing,Defocus Rendering and Blur Removal
Yujie Wang, Praneeth Chakravarthula, Baoquan Chen
3D Gaussian Splatting-based techniques have recently advanced 3D scene reconstruction and novel view synthesis, achieving high-quality real-time rendering. However, these approaches are inherently limited by the underlying pinhole camera assumption in modeling the images and hence only work for All-in-Focus (AiF) sharp image inputs. This severely affects their applicability in real-world scenarios where images often exhibit defocus blur due to the limited depth-of-field (DOF) of imaging devices. Additionally, existing 3D Gaussian Splatting (3DGS) methods also do not support rendering of DOF effects. To address these challenges, we introduce DOF-GS that allows for rendering adjustable DOF effects, removing defocus blur as well as refocusing of 3D scenes, all from multi-view images degraded by defocus blur. To this end, we re-imagine the traditional Gaussian Splatting pipeline by employing a finite aperture camera model coupled with explicit, differentiable defocus rendering guided by the Circle-of-Confusion (CoC). The proposed framework provides for dynamic adjustment of DOF effects by changing the aperture and focal distance of the underlying camera model on-demand. It also enables rendering varying DOF effects of 3D scenes post-optimization, and generating AiF images from defocused training images. Furthermore, we devise a joint optimization strategy to further enhance details in the reconstructed scenes by jointly optimizing rendered defocused and AiF images. Our experimental results indicate that DOF-GS produces high-quality sharp all-in-focus renderings conditioned on inputs compromised by defocus blur, with the training process incurring only a modest increase in GPU memory consumption. We further demonstrate the applications of the proposed method for adjustable defocus rendering and refocusing of the 3D scene from input images degraded by defocus blur.
Read more5/28/2024
0
Depth Estimation Based on 3D Gaussian Splatting Siamese Defocus
Jinchang Zhang, Ningning Xu, Hao Zhang, Guoyu Lu
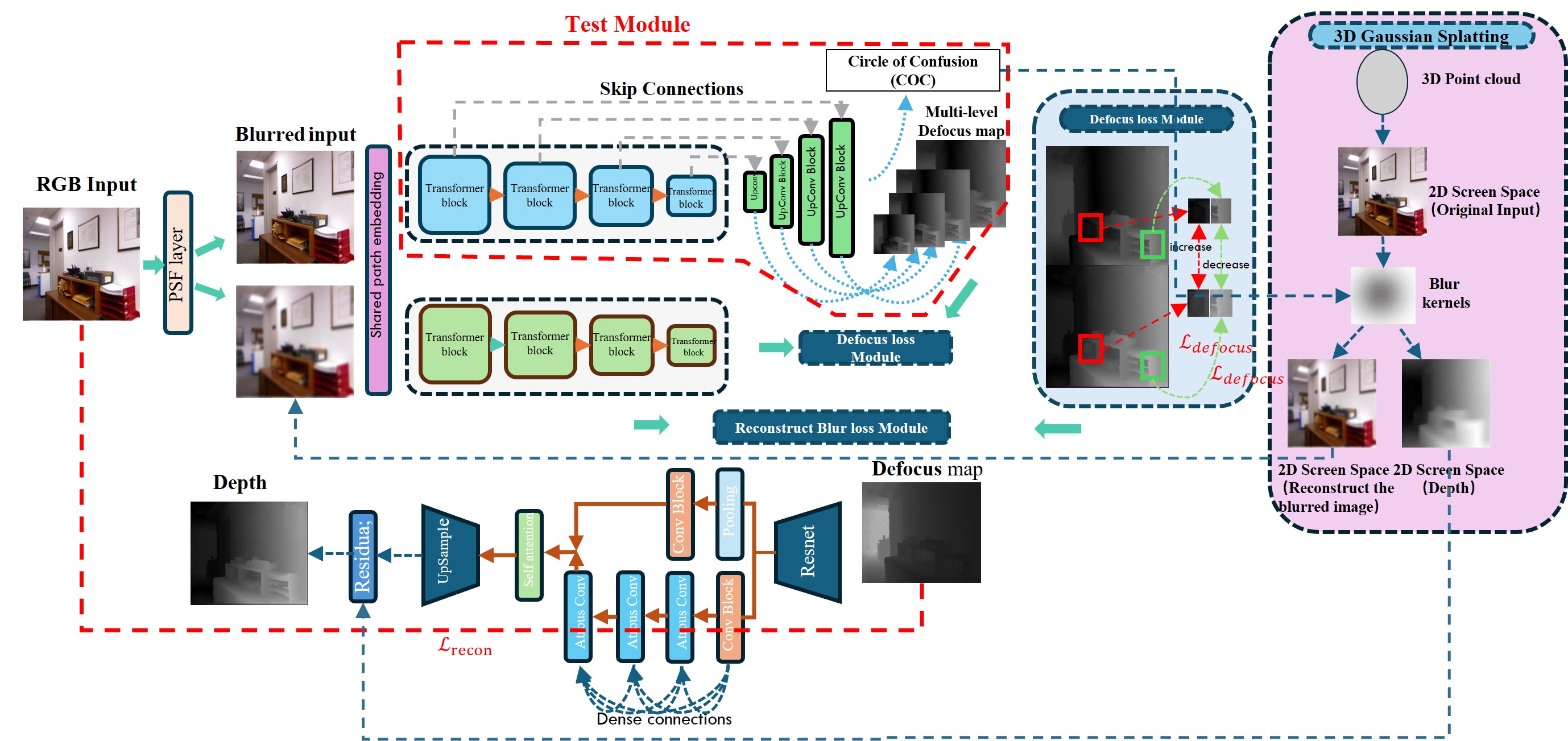
Depth estimation is a fundamental task in 3D geometry. While stereo depth estimation can be achieved through triangulation methods, it is not as straightforward for monocular methods, which require the integration of global and local information. The Depth from Defocus (DFD) method utilizes camera lens models and parameters to recover depth information from blurred images and has been proven to perform well. However, these methods rely on All-In-Focus (AIF) images for depth estimation, which is nearly impossible to obtain in real-world applications. To address this issue, we propose a self-supervised framework based on 3D Gaussian splatting and Siamese networks. By learning the blur levels at different focal distances of the same scene in the focal stack, the framework predicts the defocus map and Circle of Confusion (CoC) from a single defocused image, using the defocus map as input to DepthNet for monocular depth estimation. The 3D Gaussian splatting model renders defocused images using the predicted CoC, and the differences between these and the real defocused images provide additional supervision signals for the Siamese Defocus self-supervised network. This framework has been validated on both artificially synthesized and real blurred datasets. Subsequent quantitative and visualization experiments demonstrate that our proposed framework is highly effective as a DFD method.
Read more9/20/2024

0
Dynamic Neural Radiance Field From Defocused Monocular Video
Xianrui Luo, Huiqiang Sun, Juewen Peng, Zhiguo Cao
Dynamic Neural Radiance Field (NeRF) from monocular videos has recently been explored for space-time novel view synthesis and achieved excellent results. However, defocus blur caused by depth variation often occurs in video capture, compromising the quality of dynamic reconstruction because the lack of sharp details interferes with modeling temporal consistency between input views. To tackle this issue, we propose D2RF, the first dynamic NeRF method designed to restore sharp novel views from defocused monocular videos. We introduce layered Depth-of-Field (DoF) volume rendering to model the defocus blur and reconstruct a sharp NeRF supervised by defocused views. The blur model is inspired by the connection between DoF rendering and volume rendering. The opacity in volume rendering aligns with the layer visibility in DoF rendering. To execute the blurring, we modify the layered blur kernel to the ray-based kernel and employ an optimized sparse kernel to gather the input rays efficiently and render the optimized rays with our layered DoF volume rendering. We synthesize a dataset with defocused dynamic scenes for our task, and extensive experiments on our dataset show that our method outperforms existing approaches in synthesizing all-in-focus novel views from defocus blur while maintaining spatial-temporal consistency in the scene.
Read more8/1/2024