Trajectory optimization of tail-sitter considering speed constraints

0
Sign in to get full access
Overview
- This paper presents a method for optimizing the trajectory of a tail-sitter aircraft, taking into account speed constraints.
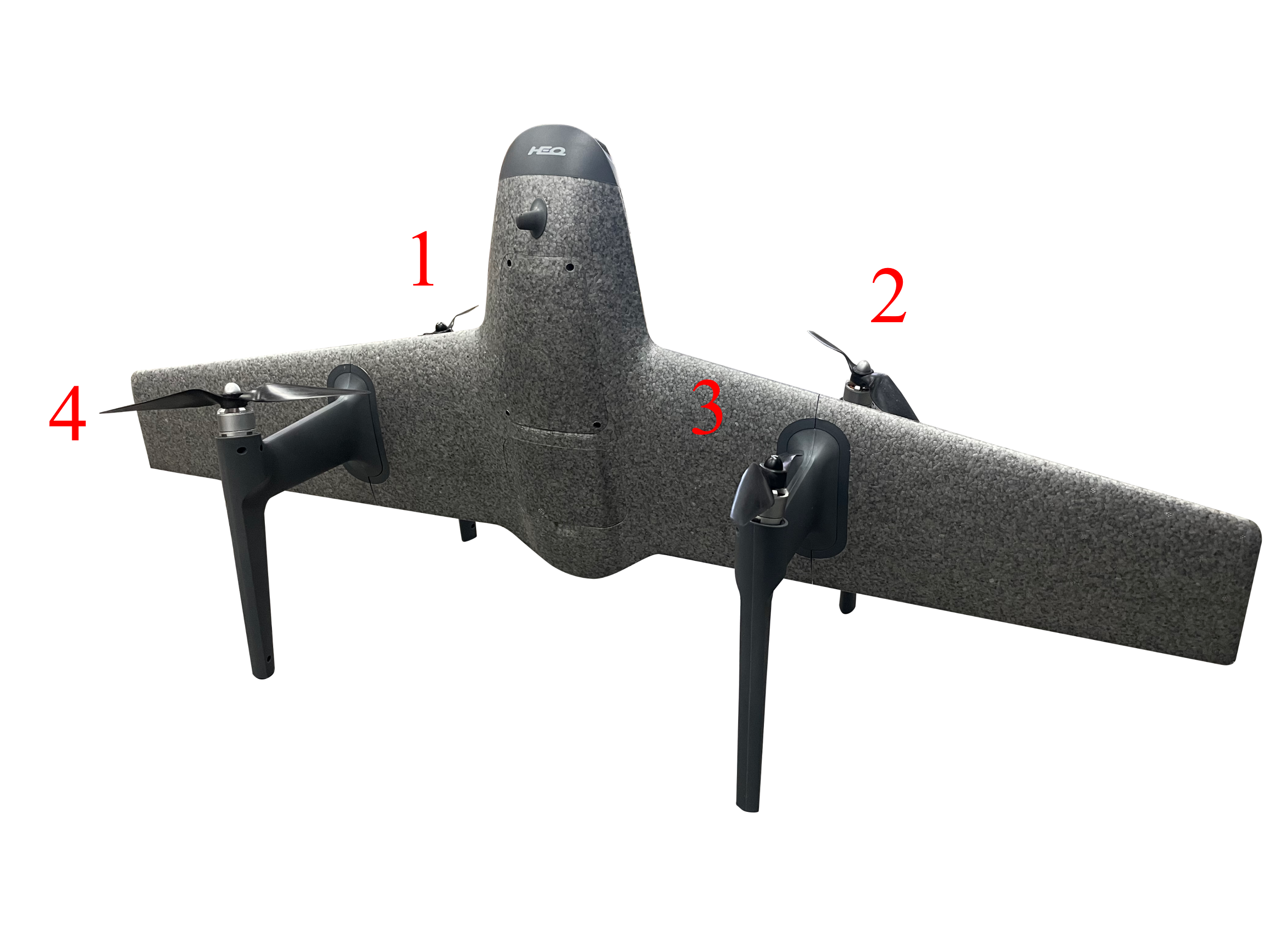
- Tail-sitters are a type of aircraft that can take off and land vertically like a helicopter, but transition to wing-borne flight for more efficient cruising.
- The proposed approach aims to generate trajectories that are time-optimal while respecting the aircraft's speed limitations.
Plain English Explanation
Tail-sitters are a unique type of aircraft that can take off and land like a helicopter, but then switch to regular airplane-style flight for more efficient travel. This paper describes a method to plan the best path, or ,[object Object],, for a tail-sitter to follow.
The key challenge is that the aircraft has different speed limits in its helicopter and airplane modes. The researchers developed an optimization technique to find the fastest overall path while making sure the tail-sitter never exceeds these speed constraints. This is similar to planning the most efficient route for a car, while obeying speed limits on different types of roads.
By accounting for the tail-sitter's speed limitations, the method can generate trajectories that are truly time-optimal - getting the aircraft from its starting point to the destination as quickly as possible. [This could be important for applications like time-critical drone deliveries or search and rescue operations where speed is crucial.
Technical Explanation
The paper formulates the tail-sitter trajectory optimization problem as a nonlinear program, with the objective of minimizing the total time-of-flight. Constraints are included to enforce the aircraft's speed limits in both its helicopter and airplane modes of flight.
The researchers use a direct collocation method to discretize the continuous-time optimal control problem. This involves approximating the state and control trajectories using piece-wise polynomials, and enforcing constraints at a finite number of collocation points.
To solve the resulting nonlinear program, the authors leverage an interior-point method. This allows them to efficiently compute locally optimal solutions, which are validated through comparison to simulations of the full nonlinear dynamics.
The techniques developed in this paper build on prior work in trajectory optimization for other types of aerial vehicles, such as multirotor drones and fixed-wing aircraft. However, the inclusion of speed constraints specific to tail-sitters represents a novel contribution.
Critical Analysis
The paper provides a rigorous mathematical formulation of the tail-sitter trajectory optimization problem, and demonstrates the effectiveness of the proposed approach through simulation results. However, the authors acknowledge that the method has been validated only in simulation, and real-world experiments would be needed to fully assess its performance.
Additionally, the paper does not consider other important practical constraints, such as obstacles in the environment or limitations on the aircraft's maneuverability. Extending the optimization framework to handle these aspects could further enhance its applicability to real-world tail-sitter operations.
Finally, while the focus on time-optimal trajectories is well-justified, there may be other relevant objectives, such as energy efficiency or passenger comfort, that could be incorporated into the optimization problem. Exploring these alternative formulations could lead to a more comprehensive understanding of tail-sitter trajectory planning.
Conclusion
This paper presents a novel approach for optimizing the trajectory of a tail-sitter aircraft, accounting for the vehicle's distinct speed constraints in helicopter and airplane modes of flight. By formulating the problem as a nonlinear program and employing efficient numerical optimization techniques, the researchers are able to generate time-optimal trajectories that respect the aircraft's speed limits.
The proposed method represents a significant advancement in the field of tail-sitter trajectory planning, and could have important implications for applications where rapid, efficient flight is paramount. Further extensions to consider real-world operational constraints and alternative objective functions could help unlock the full potential of this unique aircraft configuration.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Trajectory optimization of tail-sitter considering speed constraints
Mingyue Fan, Fangfang Xie, Tingwei Ji, Yao Zheng
Tail-sitters, with the advantages of both the fixed-wing unmanned aerial vehicles (UAVs) and vertical take-off and landing UAVs, have been widely designed and researched in recent years. With the change in modern UAV application scenarios, it is required that UAVs have fast maneuverable three-dimensional flight capabilities. Due to the highly nonlinear aerodynamics produced by the fuselage and wings of the tail-sitter, how to quickly generate a smooth and executable trajectory is a problem that needs to be solved urgently. We constrain the speed of the tail-sitter, eliminate the differential dynamics constraints in the trajectory generation process of the tail-sitter through differential flatness, and allocate the time variable of the trajectory through the state-of-the-art trajectory generation method named MINCO. By discretizing the trajectory in time, we convert the speed constraint on the vehicle into a soft constraint, thereby achieving the time-optimal trajectory for the tail-sitter to fly through any given waypoints.
Read more6/26/2024

0
Trajectory Tracking for Unmanned Aerial Vehicles in 3D Spaces under Motion Constraints
Saurabh Kumar, Shashi Ranjan Kumar, Abhinav Sinha
This article presents a three-dimensional nonlinear trajectory tracking control strategy for unmanned aerial vehicles (UAVs) in the presence of spatial constraints. As opposed to many existing control strategies, which do not consider spatial constraints, the proposed strategy considers spatial constraints on each degree of freedom movement of the UAV. Such consideration makes the design appealing for many practical applications, such as pipeline inspection, boundary tracking, etc. The proposed design accounts for the limited information about the inertia matrix, thereby affirming its inherent robustness against unmodeled dynamics and other imperfections. We rigorously show that the UAV will converge to its desired path by maintaining bounded position, orientation, and linear and angular speeds. Finally, we demonstrate the effectiveness of the proposed strategy through various numerical simulations.
Read more7/16/2024
0
Real-time Planning of Minimum-time Trajectories for Agile UAV Flight
Krystof Teissing, Matej Novosad, Robert Penicka, Martin Saska
We address the challenge of real-time planning of minimum-time trajectories over multiple waypoints, onboard multirotor UAVs. Previous works demonstrated that achieving a truly time-optimal trajectory is computationally too demanding to enable frequent replanning during agile flight, especially on less powerful flight computers. Our approach overcomes this stumbling block by utilizing a point-mass model with a novel iterative thrust decomposition algorithm, enabling the UAV to use all of its collective thrust, something previous point-mass approaches could not achieve. The approach enables gravity and drag modeling integration, significantly reducing tracking errors in high-speed trajectories, which is proven through an ablation study. When combined with a new multi-waypoint optimization algorithm, which uses a gradient-based method to converge to optimal velocities in waypoints, the proposed method generates minimum-time multi-waypoint trajectories within milliseconds. The proposed approach, which we provide as open-source package, is validated both in simulation and in real-world, using Nonlinear Model Predictive Control. With accelerations of up to 3.5g and speeds over 100 km/h, trajectories generated by the proposed method yield similar or even smaller tracking errors than the trajectories generated for a full multirotor model.
Read more9/25/2024

0
An Efficient Trajectory Generation for Bi-copter Flight in Tight Space
Xin Dong, Yangjie Cui, Jingwu Xiang, Daochun Li, Zhan Tu
Unlike squared (or alike) quadrotors, elongated bi-copters leverage natural superiority in crossing tight spaces. To date, extensive works have focused on the design, modeling, and control of bi-copters. Besides, a proper motion planner utilizing bi-copters' shape characteristics is essential to efficiently and safely traverse tight spaces, yet it has rarely been studied. Current motion planning methods will significantly compromise their ability to traverse narrow spaces if the map is inflated based on the long dimension of the bi-copter. In this paper, we propose an efficient motion planning method that enables the safe navigation of bi-copters through narrow spaces. We first adapt a dynamic, feasible path-finding algorithm with whole-body collision checks to generate a collision-free path. Subsequently, we jointly optimize the position and rotation of the bi-copter to produce a trajectory that is safe, dynamically feasible, and smooth. Extensive simulations and real-world experiments have been conducted to verify the reliability and robustness of the proposed method.
Read more6/4/2024